一种水面水下无人机跨域协同运动控制方法
本发明涉及无人机控制应用,特别是一种水面水下无人机跨域协同运动控制方法。
背景技术:
1、为了更好地探测海洋资源,世界各国都开发了不同种类的海洋装配用于探测海洋资源。这些海洋装配可以执行各种任务,例如海洋调查、生态监测和环境保护等。然而,在以往的研究当中,水面装置与水下装置是两个分离的系统。同时,由于单种类水下机器人作业往往存在续航时间短,作业范围小,水下通信困难等问题。它们很难进行有效的协同作业,从而限制了它们的应用范围和性能。这种水面水下协同运动控制技术对于提升水下机器人的续航,扩大其作业范围,这对于海洋科学研究等领域具有重要应用价值。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种水面水下无人机跨域协同运动控制方法,实现水面水下无人机的高效协同运动作业。
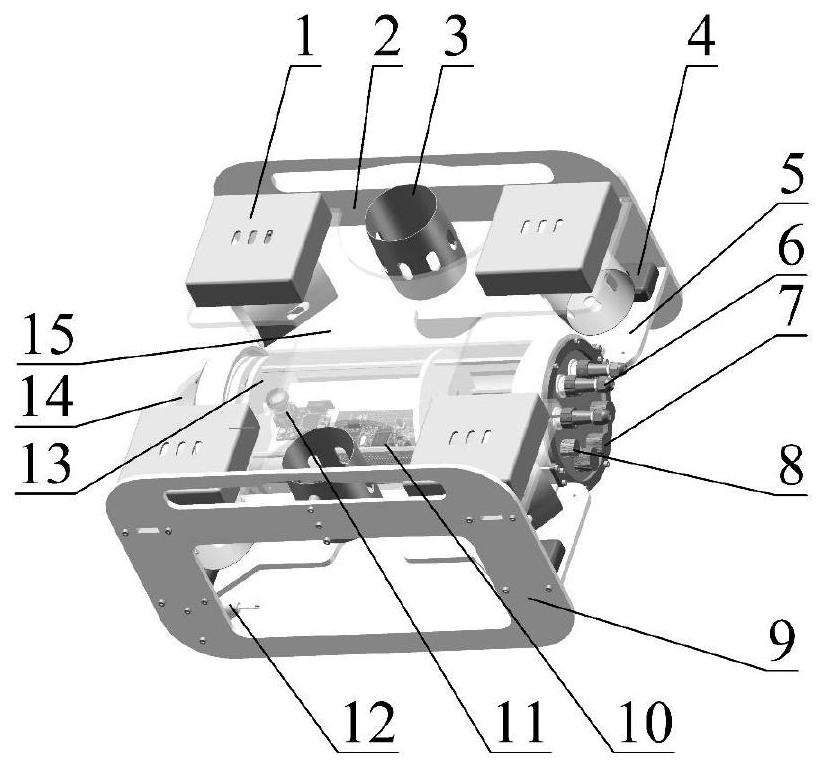
2、为实现上述目的,本发明采用如下技术方案:一种水面水下无人机跨域协同运动控制方法,无人机包括水下机器人rov和水面无人船usv;所述水下机器人rov本体包括左右侧板、上下侧板、耐压舱、密封元器件构成水下机器人rov的整体框架,所述水下机器人整体框架上安装4个水平推进器和2个垂直推进器,电子元器件、嵌入式计算机及水下广角相机并密封在耐压舱体内;所述水面无人船usv为双桨一体式,通过差速的方式调节,水面无人船usv外侧安装三颗照明光源,该照明光源作为水下机器人rov识别水面无人船usv的重要标识,水面无人船usv舱内部装有北斗-gps定位、无线通信、电源、电子调速器以及嵌入式计算机。
3、在一较佳的实施例中,所述的水下机器人rov和水面无人船usv还包括电子罗盘,电子罗盘通过检测地磁场的大小来确定无人机的航向。
4、在一较佳的实施例中,所述水下机器人rov还包括深度传感器和姿态传感器,用于检测水下机器人rov的姿态和深度控制。
5、在一较佳的实施例中,所述的水下机器人rov根据其自身的广角相机来检测水面无人船usv上的灯光在图像中的坐标位置,由于无人船上灯光呈三角形安装,根据三点灯光坐标值的变化与三角形位姿的变化实现水下机器人rov对水面无人船usv在航向与位置上的持续跟随。
6、本发明还提供了一种水面水下无人机跨域协同运动控制方法,包括以下步骤:
7、步骤s1:配置水下机器人rov的相机,确保其处在水下不同环境都可正常使用,并且保证能够拍摄并检测到水面无人船usv上的用于标识的灯光;
8、步骤s2:使用能够识别到无人艇上的光源以及检测光源在图像中的像素坐标值的图像处理算法;
9、步骤s3:水下机器人通过相机实时捕捉水面无人艇的每一帧图像,然后运用图像处理算法来检测图像坐标中灯光的位置,获取相应的像素坐标值;
10、步骤s4:基于图像中像素坐标值的变化量,计算出水下机器人相对于水面无人艇的速度和方向角度变化;
11、步骤s5:设计协同运动规划算法,基于持续地获取水面无人艇上灯光的位置信息,实时调整运动控制策略;
12、步骤s6:基于上述步骤将最终的结果转化到无人机的推进器上,实现无人机的协同运动。
13、在一较佳的实施例中,采用otsu方法确保在不同环境下获得良好的二值化效果;otsu方法通过最小化类内方差和最大化类间方差的方式自适应地确定图像阈值;otsu方法假设图像包含两个类即前景和背景,并寻找一个阈值,使得两个类之间的方差最大,而各自类内方差最小;otsu方法的首先需要计算图像的灰度直方图:
14、
15、其中ni是灰度级别为i的像素数量,n为图像的像素总数,p为出现的概率;因此对于累积到灰度级别i的累积概率pi为:
16、
17、对于灰度级别从0到k的平均灰度u为:
18、
19、根据上述公式,对于每一个可能的阈值t,假设小于阈值t的平均灰度级别为u0,大于阈值t的平均灰度级别为u1,则对于阈值为t两侧的局部方差分别为:
20、
21、
22、对于每一个可能得阈值t,其类内方差σω2和类间方差σb2计算如下:
23、
24、
25、式中ut为整个图像的平均灰度值,对于类间方差和类内方差有如下结论:
26、
27、上式中表示图像的总方差为一个定值,当最大化类间方差时,即最小化类内方差,能够使得式最大化的灰度级别k就是所求的最优阈值。
28、在一较佳的实施例中,根据上述为求得最优阈值,只需要遍历并计算各个灰度级别的类间方差将计算出的最大类间方差所对应的灰度值k为阈值将图像进行二值化,对二值化后的图像进行边缘检测进一步提取光斑的中心坐标位置。
29、在一较佳的实施例中,提取特征边缘后所得到的像素坐标呈现三角形几何形状,根据每帧图像中特征点坐标像素坐标的变化量以及三角形的旋转变化可求得rov与usv的相对角度变化,根据刚体的旋转,因此只需求得三角形对应边直线前后的夹角即为前后角度的变化量,这里假设三角形的两点坐标分别为(x0,y0)和(x1,y1),变化后的坐标分别为(x′0,y′0)和(x′1,y′1),根据向量的内积可以求得其相对角度θ变化为:
30、
31、上式中v1表示变化前的方向向量,v2表示变化后的方向向量,根据所求的角度即为rov相对于usv的旋转角度,此时只需调整rov旋转θ角度可,其调节方向可以通过向量叉积的正负来判断;同时,为保证usv在相机的可检测范围内,需要对灯光的在图像中坐标范围进行限定,当光源的像素坐标到达图像边界点时,rov需反向移动远离边界,确保其能够处于有效的检测范围内。
32、与现有技术相比,本发明具有以下有益效果:此协同控制系统利用水下机器人的视觉感知,实现了水面水下无人机之间的智能协同运动,为水下探测与水面监测等协同作业提供了一种简单且易于实现的解决方案。
技术特征:
1.一种水面水下无人机跨域协同运动控制方法,其特征在于,无人机包括水下机器人rov和水面无人船usv;所述水下机器人rov本体包括左右侧板、上下侧板、耐压舱、密封元器件构成水下机器人rov的整体框架,所述水下机器人整体框架上安装4个水平推进器和2个垂直推进器,电子元器件、嵌入式计算机及水下广角相机并密封在耐压舱体内;所述水面无人船usv为双桨一体式,通过差速的方式调节,水面无人船usv外侧安装三颗照明光源,该照明光源作为水下机器人rov识别水面无人船usv的重要标识,水面无人船usv舱内部装有北斗-gps定位、无线通信、电源、电子调速器以及嵌入式计算机。
2.根据权利要求1所述的一种水面水下无人机跨域协同运动控制方法,其特征在于,所述的水下机器人rov和水面无人船usv还包括电子罗盘,电子罗盘通过检测地磁场的大小来确定无人机的航向。
3.根据权利要求1所述的一种水面水下无人机跨域协同运动控制方法,其特征在于,所述水下机器人rov还包括深度传感器和姿态传感器,用于检测水下机器人rov的姿态和深度控制。
4.根据权利要求1所述的一种水面水下无人机跨域协同运动控制方法,其特征在于,所述的水下机器人rov根据其自身的广角相机来检测水面无人船usv上的灯光在图像中的坐标位置,由于无人船上灯光呈三角形安装,根据三点灯光坐标值的变化与三角形位姿的变化实现水下机器人rov对水面无人船usv在航向与位置上的持续跟随。
5.一种基于权利要求1-4任一项所述一种水面水下无人机跨域协同运动控制方法,其特征在于,包括以下步骤:
6.根据权利要求5所述的一种水面水下无人机跨域协同运动控制方法,其特征在于,采用otsu方法确保在不同环境下获得良好的二值化效果;otsu方法通过最小化类内方差和最大化类间方差的方式自适应地确定图像阈值;otsu方法假设图像包含两个类即前景和背景,并寻找一个阈值,使得两个类之间的方差最大,而各自类内方差最小;otsu方法的首先需要计算图像的灰度直方图:
7.根据权利要求6所述的水面水下无人机跨域协同运动控制方法,其特征在于,根据上述为求得最优阈值,只需要遍历并计算各个灰度级别的类间方差将计算出的最大类间方差所对应的灰度值k为阈值将图像进行二值化,对二值化后的图像进行边缘检测进一步提取光斑的中心坐标位置。
8.根据权利要求7所述的水面水下无人机跨域协同运动控制方法,其特征在于,提取特征边缘后所得到的像素坐标呈现三角形几何形状,根据每帧图像中特征点坐标像素坐标的变化量以及三角形的旋转变化可求得rov与usv的相对角度变化,根据刚体的旋转,因此只需求得三角形对应边直线前后的夹角即为前后角度的变化量,这里假设三角形的两点坐标分别为(x0,y0)和(x1,y1),变化后的坐标分别为(x′0,y′0)和(x′1,y′1),根据向量的内积可以求得其相对角度θ变化为:
技术总结
本发明提出一种水面水下无人机跨域协同运动控制方法,涉及水面及水下无人机控制技术领域,此协同控制系统基于水下机器人的广角相机和水面无人船上安装的灯光组合进行实现。水面水下无人机协同运动控制系统是为了实现水下机器人对水面无人艇的跟随运动。水下机器人通过搭载相机检测水面无人艇上的灯光,并通过监测灯光在图像中坐标的变化量实现水下机器人的运动调控。采用协同算法,水下机器人根据水面无人艇的运动信息,实时调整航行方向和速度,以确保持续跟随水面无人艇。此协同控制系统利用水下机器人的视觉感知,实现了水面水下无人机之间的智能协同运动,为水下探测与水面监测等协同作业提供了一种简单且易于实现的解决方案。
技术研发人员:李劲林,汪帅帅,钟舜聪
受保护的技术使用者:福州大学
技术研发日:
技术公布日:2024/5/9
- 还没有人留言评论。精彩留言会获得点赞!