一种多涵道旋翼可变构飞行器飞行控制方法、装置、计算机可读存储介质及产品
本发明涉及飞行器控制,特别涉及一种多涵道旋翼可变构飞行器飞行控制方法、装置、计算机可读存储介质及产品。
背景技术:
1、目前常见中小型旋翼飞行器在高升力与高通过性之间存在矛盾关系,传统方法上,一般采用增大旋翼半径的方法来提高旋翼飞行器的升力,进而提高旋翼飞行器的负载,但这也意味着旋翼飞行器将会有更大的体积,不利于其在相对狭小的空间中飞行,降低了旋翼飞行器的通过性与灵活性。由此多涵道旋翼飞行的概念就被提出,与传统方法不同,多旋翼飞行器通过增加旋翼的数量而非旋翼的半径来增加旋翼飞行器的升力,同时在同一方向上,为每个小旋翼之间添加变构装置,实现旋翼之间夹角的改变,进而改变旋翼飞行器整体的几何形态,即提高了旋翼飞行器的升力,也降低了对飞行器通过性与灵活性的影响。但是变构装置的引入,提升了旋翼飞行器的整体性能,缓解了高升了力与高通过性之间的矛盾,但同时也增加了飞行控制器的设计难度。
技术实现思路
1、基于此,本发明的目的是提供一种多涵道旋翼可变构飞行器飞行控制方法、装置、计算机可读存储介质及产品,解决飞行器在飞行过程中变构带来的飞行器转动惯量、螺旋桨升力变化对飞行器稳定性的影响,保证飞行器能稳定地在飞行状态下完成变构过程。
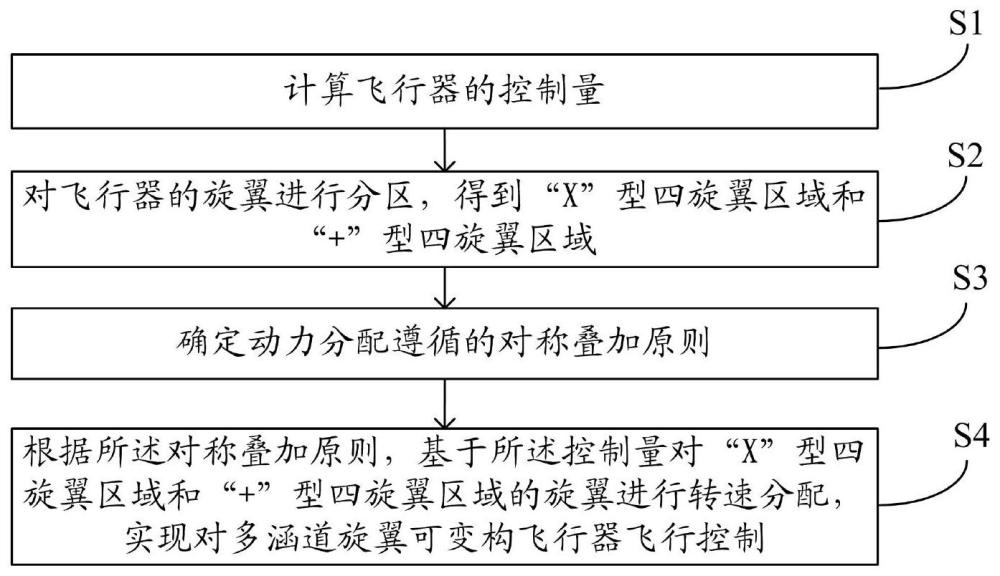
2、为实现上述目的,本发明提供了一种多涵道旋翼可变构飞行器飞行控制方法,包括:计算飞行器的控制量;对飞行器的旋翼进行分区,得到“x”型四旋翼区域和“+”型四旋翼区域;确定动力分配遵循的对称叠加原则;根据所述对称叠加原则,基于所述控制量对“x”型四旋翼区域和“+”型四旋翼区域的旋翼进行转速分配,实现对多涵道旋翼可变构飞行器飞行控制。
3、为实现上述目的,本发明还提供了一种计算机装置,包括:存储器、处理器以存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现上述多涵道旋翼可变构飞行器飞行控制方法的步骤。
4、为实现上述目的,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述多涵道旋翼可变构飞行器飞行控制方法的步骤。
5、为实现上述目的,本发明还提供了一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序/指令被处理器执行时实现上述多涵道旋翼可变构飞行器飞行控制方法的步骤。
6、根据本发明提供的具体实施例,本发明公开了以下技术效果:
7、本发明通过动力分配遵循的对称叠加原则对多旋翼飞行器的涵道旋翼进行分区控制,实现对旋翼转速的合理分配,能够在不精确测量飞行器质量和惯量的前提下,保证飞行器的稳定飞行,提高控制系统的参数自适应能力。此外考虑到多涵道旋翼飞行器固有的特点,本发明还能够提高飞行器动力系统的容错性。
技术特征:
1.一种多涵道旋翼可变构飞行器飞行控制方法,其特征在于,包括:
2.根据权利要求1所述的多涵道旋翼可变构飞行器飞行控制方法,其特征在于,计算飞行器的控制量,具体包括:
3.根据权利要求2所述的多涵道旋翼可变构飞行器飞行控制方法,其特征在于,所述高度控制量u1的计算公式为:
4.根据权利要求2所述的多涵道旋翼可变构飞行器飞行控制方法,其特征在于,所述虚拟控制量的计算公式为:
5.根据权利要求2所述的多涵道旋翼可变构飞行器飞行控制方法,其特征在于,所述期望翻滚角φd的计算公式为:
6.根据权利要求2所述的多涵道旋翼可变构飞行器飞行控制方法,其特征在于,根据所述期望俯仰角和所述期望翻滚角进行姿态解算,得到姿态控制量,具体包括:
7.根据权利要求1所述的多涵道旋翼可变构飞行器飞行控制方法,其特征在于,根据所述对称叠加原则,基于所述控制量对“x”型四旋翼区域和“+”型四旋翼区域的旋翼进行转速分配,实现对多涵道旋翼可变构飞行器飞行控制,具体包括:
8.一种计算机装置,包括:存储器、处理器以存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序以实现权利要求1-7中任一项所述多涵道旋翼可变构飞行器飞行控制方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-7中任一项所述多涵道旋翼可变构飞行器飞行控制方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序/指令被处理器执行时实现权利要求1-7中任一项所述多涵道旋翼可变构飞行器飞行控制方法的步骤。
技术总结
本发明公开了一种多涵道旋翼可变构飞行器飞行控制方法、装置、计算机可读存储介质及产品,涉及飞行器控制技术领域,方法包括:计算飞行器的控制量;对飞行器的旋翼进行分区,得到“X”型四旋翼区域和“+”型四旋翼区域;确定动力分配遵循的对称叠加原则;根据所述对称叠加原则,基于所述控制量对“X”型四旋翼区域和“+”型四旋翼区域的旋翼进行转速分配,实现对多涵道旋翼可变构飞行器飞行控制。本发明能够解决飞行器在飞行过程中变构带来的飞行器转动惯量、螺旋桨升力变化对飞行器稳定性的影响,保证飞行器能稳定地在飞行状态下完成变构过程。
技术研发人员:马越,步智恒,唐牧城,严骁,徐丽丽,史中杰
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!