无人机避障方法、避障装置和无人机与流程
本发明涉及无人机路径规划领域,具体而言,涉及一种无人机避障方法、避障装置、计算机可读存储介质和无人机。
背景技术:
1、近年来,随着无人机智能化技术的快速发展,针对无人机自适应飞行和无人机应用领域的研究越来越深入。基于传统的自动化控制理论和基于新型的深度学习方法均为无人机航线自主规划和自适应避障添砖加瓦,加速了无人机在航空摄影、农业喷洒、消防救援以及高空巡检等场景中的应用和创新。然而,无人机在自主飞行过程中常常面临着飞行安全的威胁,避免与障碍物的碰撞是保证无人机安全飞行的重要问题之一,故开展关于无人机安全可靠的避障研究至关重要。
2、无人机避障技术能够提高无人机的飞行效率和自主性,传统的预设避障路径受到环境动态变化的影响,通常需要无人机频繁地修改路径或中断任务。而自适应避障技术根据实时环境信息进行决策,无人机都能够安全有效地应对障碍物,并做出适当的避让动作。目前已经存在的一些基于单一传感器的无人机避障方法,如传感器测距的控制系统或结合感知训练的深度学习方法,这些方法受到光照条件和视野限制的影响存在一定的局限性。
技术实现思路
1、本技术的主要目的在于提供一种无人机避障方法、避障装置、计算机可读存储介质和无人机,以至少解决现有技术中的问题。
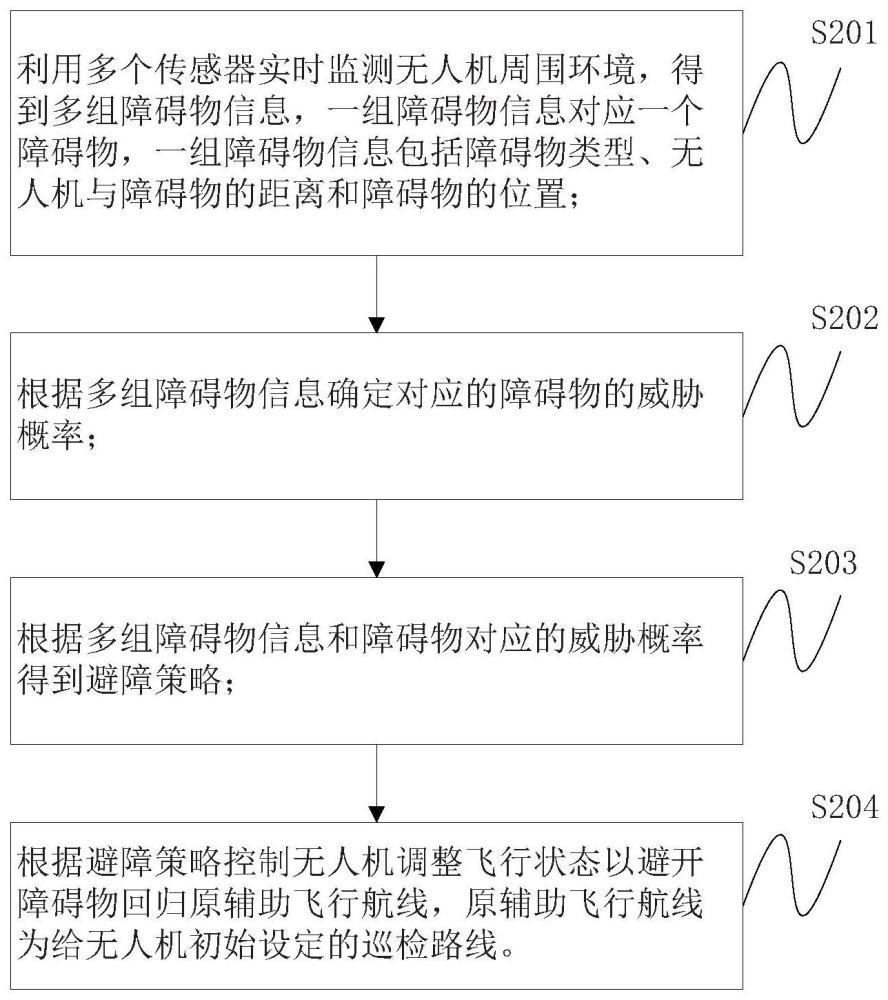
2、为了实现上述目的,根据本技术的一个方面,提供了一种无人机避障方法,所述方法包括:利用多个传感器实时监测无人机周围环境,得到多组障碍物信息,一组所述障碍物信息对应一个障碍物,一组所述障碍物信息包括障碍物类型、无人机与所述障碍物的距离和所述障碍物的位置;根据多组所述障碍物信息确定对应的所述障碍物的威胁概率;根据多组所述障碍物信息和所述障碍物对应的所述威胁概率得到避障策略;根据所述避障策略控制所述无人机调整飞行状态以避开所述障碍物回归原辅助飞行航线,所述原辅助飞行航线为给所述无人机初始设定的巡检路线。
3、可选地,所述传感器包括双目传感器和超声波传感器,利用多个传感器实时监测无人机周围环境,得到多个障碍物信息,包括:通过所述双目传感器捕捉所述无人机周围环境图像,并利用三角测量的方法计算所述障碍物与所述无人机之间的距离,得到第一距离信息;通过所述超声波传感器发射超声波信号并计算接收回波信号的时间来确定与所述障碍物之间的距离,得到第二距离信息;对所述第一距离信息和所述第二距离信息进行预处理操作,并分析得到多个所述障碍物的距离,所述预处理操作包括数据清洗和数据整合。
4、可选地,根据多个所述障碍物信息确定对应的所述障碍物的威胁概率,包括:计算所述障碍物类型对应的所述障碍物的个数与总威胁权重值的比值,得到所述障碍物对应的所述威胁概率,所述总威胁权重值为各所述障碍物类型对应的所述障碍物的个数与对应所述障碍物类型的威胁程度权重的乘积之和,一个所述障碍物类型对应一个所述威胁程度权重。
5、可选地,所述障碍物类型包括小型固定障碍物、大型固定障碍物和移动障碍物,在计算所述障碍物对应的所述障碍物类型的总个数与总威胁权重值的比值,得到所述障碍物对应的所述威胁概率之前,所述方法还包括:对固定的所述障碍物建立数学模型,得到所述障碍物对应的最大切面长方体;在所述最大切面长方体中的任意一条边的长度大于或等于设定长度的情况下,确定所述障碍物对应的所述障碍物类型为所述大型固定障碍物;在所述最大切面长方体中的所有边的长度均小于所述设定长度的情况下,确定所述障碍物对应的所述障碍物类型为所述小型固定障碍物;对移动的所述障碍物确定为所述移动障碍物。
6、可选地,根据多个所述障碍物信息和所述障碍物对应的所述威胁概率得到避障策略,包括:在所述障碍物为所述小型固定障碍物且所述威胁概率低于设定威胁概率的情况下,确定所述避障策略为控制所述无人机继续前进;在所述障碍物为所述小型固定障碍物且所述威胁概率高于所述设定威胁概率,或者所述障碍物为所述大型固定障碍物且所述威胁概率低于所述设定威胁概率的情况下,确定所述避障策略为控制所述无人机调整飞行高度或飞行方向以绕开所述障碍物;在所述障碍物为所述大型固定障碍物且所述威胁概率高于所述设定威胁概率的情况下,确定所述避障策略为控制所述无人机悬停并将遇障信息发送至客户端,响应于所述客户端发出的飞行指令进行飞行控制,所述飞行指令为根据所述遇障信息确定的相应避障措施的指令;在所述障碍物为所述移动障碍物的情况下,确定所述避障策略为控制所述无人机处于安全范围内与所述移动障碍物保持安全距离飞行,所述安全范围为以所述无人机为中心,在设定最小安全距离内的范围。
7、可选地,确定所述避障策略为控制所述无人机处于安全范围内与所述移动障碍物保持安全距离飞行,包括:获取所述移动障碍物的空间大小、与所述无人机之间距离以及与所述无人机之间的相对速度;在所述移动障碍物与所述无人机同向飞行的情况下,根据所述移动障碍物的移动速度,控制调节飞行速度和飞行角度,使得所述无人机与所述障碍物保持所述安全距离飞行同时保证与巡检目标的距离,所述巡检目标为所述无人机进行监控观测的物体;在所述移动障碍物与所述无人机反向飞行的情况下,根据所述无人机的三维坐标,所述移动障碍物的所述三维坐标以及所述无人机与所述障碍物的设定最小安全距离建立数学约束模型得到所述安全范围,以控制所述移动障碍物处于所述安全范围之外。
8、可选地,在对所述第一距离信息和所述第二距离信息进行预处理操作,并分析得到多个所述障碍物的距离之后,所述方法还包括:根据多个所述障碍物信息构建环境三维地图模型,将所述环境三维地图模型、所述无人机的实时位置和所述障碍物信息同步发送至客户端以实时展示所述无人机的飞行情况。
9、根据本技术的另一方面,提供了一种无人机避障装置,所述装置包括:监测单元,用于利用多个传感器实时监测无人机周围环境,得到多组障碍物信息,一组所述障碍物信息对应一个障碍物,一组所述障碍物信息包括障碍物类型、无人机与所述障碍物的距离和所述障碍物的位置;第一确定单元,用于根据多组所述障碍物信息确定对应的所述障碍物的威胁概率;第二确定单元,用于根据多组所述障碍物信息和所述障碍物对应的所述威胁概率得到避障策略;避障单元,用于根据所述避障策略控制所述无人机调整飞行状态以避开所述障碍物回归原辅助飞行航线,所述原辅助飞行航线为给所述无人机初始设定的巡检路线。
10、根据本技术的再一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行任意一种所述的方法。
11、根据本技术的又一方面,提供了一种无人机,包括:一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行任意一种所述的方法。
12、应用本技术的技术方案,在无人机避障方法中,首先,利用多个传感器实时监测无人机周围环境,得到多组障碍物信息,一组障碍物信息对应一个障碍物,一组障碍物信息包括障碍物类型、无人机与障碍物的距离和障碍物的位置;然后,根据多组障碍物信息确定对应的障碍物的威胁概率;之后,根据多组障碍物信息和障碍物对应的威胁概率得到避障策略;最后,根据避障策略控制无人机调整飞行状态以避开障碍物回归原辅助飞行航线,原辅助飞行航线为给无人机初始设定的巡检路线。本技术采用多个传感器进行环境测距得到无人机周围环境中障碍物信息,对障碍物信息进行威胁概率分析以根据不同障碍物情况得到不同的避障策略,通过避障策略综合判断局部航线飞行规划调整无人机的飞行状态灵活避开障碍物直到安全回归原辅助飞行航线上。本技术解决了现有技术中基于单一传感器的无人机避障方法或结合感知训练的深度学习方法受到光照条件和视野限制的影响存在一定的局限性的问题。
- 还没有人留言评论。精彩留言会获得点赞!