杯缝定位方法与纸杯检测系统与流程
1.本发明涉及机器视觉技术领域,尤其涉及一种杯缝定位方法与纸杯检测系统。
背景技术:
2.机器视觉广泛地应用于我们所熟知的自动化生产领域中:电子制造,汽车行业,制药行业,食品包装,印刷行业等等。它所实现的功能或动作就是进行一个物品的识别或检测:电子元器件定位,aoi光学检测,装配定位与检测,分拣与包装,外观检测等等。其在生产制造的自动化进程中起着至关重要的作用及独有优势:避免不良品外流,减少客诉成本;高速检测,提升设备产能及运转效率,降低生产成本。它的高精度,连续性,灵活性,重复性是传统的检测方式无法媲美的。
3.例如,纸杯生产厂商在纸杯批量生产之后,卫生检测环节尤为重要。目前对于纸杯测试模式主要为人工测试,此种模式的优点为具有较高的灵活性,可根据不同的规格要求进行灵活的检测判断。但是,单靠人力肉眼判断纸杯内壁是否有污点,人眼很快会出现疲劳,并且检测效率低下,甚至会造成纸杯二次污染问题,因此,此种模式的缺点为效率低、精度差、长期成本高。
4.因此,如何有效利用机器视觉系统实现纸杯的品质检测成为业界迫切需要解决的问题之一。
技术实现要素:
5.本发明的目的在于提供一种杯缝定位方法与纸杯检测系统,可实现纸杯的检测。
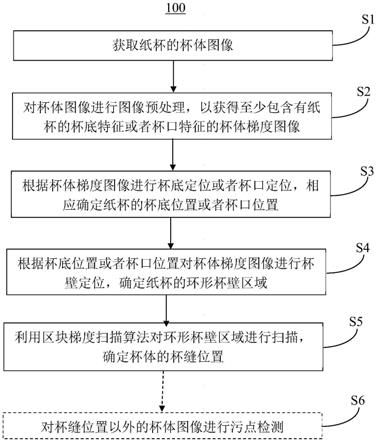
6.为了实现上述目的,本发明提供一种杯缝定位方法,其包括:步骤s1、获取纸杯的杯体图像;步骤s2、对所述杯体图像进行图像预处理,以获得至少包含有所述纸杯的杯底特征或者杯口特征的杯体梯度图像;步骤s3、根据所述杯体梯度图像进行杯底定位或者杯口定位,相应确定所述纸杯的杯底位置或者杯口位置;步骤s4、根据所述杯底位置或者所述杯口位置对所述杯体梯度图像进行杯壁定位,确定所述纸杯的环形杯壁区域;步骤s5、利用区块梯度扫描算法对所述环形杯壁区域进行扫描,确定所述杯体的杯缝位置。
7.在本发明的一实施例中,在所述步骤s1中,当所述纸杯被传送到工业相机的视野下时,触发频闪球积分光源并拍照来获取所述杯体图像。
8.在本发明的一实施例中,所述步骤s2中的图像预处理还包括:对所述杯体图像进行灰度化处理,获得灰度图像。
9.在本发明的一实施例中,对所述灰度图像进行滤波处理,获得滤波后图像。
10.在本发明的一实施例中,对所述灰度图像使用引导滤波算法剔除干扰点,获得滤波后图像。
11.在本发明的一实施例中,通过sobel梯度算法对所述滤波后图像进处理得到所述杯体梯度图像。
12.在本发明的一实施例中,在所述步骤s3中是对所述杯体梯度图像进行杯底或者杯
口的hough圆检测,以相应获得所述纸杯的杯底拟合圆或者杯口拟合圆,从而确定所述杯底位置或者所述杯口位置。
13.在本发明的一实施例中,在所述步骤s4中是根据所述杯底拟合圆或者所述杯口拟合圆的中心位置确定出所述环形杯壁区域。
14.在本发明的一实施例中,所述步骤s5包括:步骤s51、对所述环形杯壁区域进行区块梯度扫描;步骤s52、记录梯度大于设定阈值的轮廓点;步骤s53、根据所得到的轮廓点进行直线拟合,获得杯缝拟合直线;步骤s54、根据所述杯缝拟合直线确定杯缝位置。
15.在本发明的一实施例中,步骤s53中采用ransac直线拟合方法得到所述杯缝拟合直线。
16.在本发明的一实施例中,所述步骤s51中还包括:确定扫描块大小和每次扫描的位移量;以及确定扫描块的起始位置和扫描方向。
17.在本发明的一实施例中,所述步骤s52之前还包括计算所述杯体图像的平均像素灰度。
18.在本发明的一实施例中,在所述步骤s52中,计算扫描块所扫描的位置的平均像素灰度,其中,所述扫描块所扫描的位置的梯度等于所述扫描块所扫描的位置的平均像素灰度减去所述杯体图像的平均像素灰度,并记录梯度大于所述设定阈值的轮廓点。
19.在本发明的一实施例中,在确定所述杯缝位置之后还包括:步骤s6、对所述杯缝位置以外的杯体图像进行污点检测。
20.为了实现上述目的,本发明还提供一种纸杯检测系统,其包括有:传送机构,用于传送待检测的纸杯至一待检测位置;工业相机,对应设置于所述待检测位置,用于获取位于所述待检测位置上的所述纸杯的一杯体图像;处理器,用于执行如上所述的杯缝定位方法。
21.在本发明的一实施例中,所述纸杯检测系统还包括有:环形的频闪球积分光源,对应于所述工业相机设置,用于在所述待检测的纸杯被传送至所述待检测位置时被触发以供所述工业相机进行拍照时光线补偿。
22.通过本发明,能够快速定位随机角度的纸杯的杯缝位置,精确检测杯缝处的脏污,解决了人工目检纸杯脏污的低效率、易疲劳、以及二次污染等缺陷。
23.本发明的额外方面和优点将部分地在下面的描述中阐述,并且部分地将从描述中变得显然,或者可以通过本发明的实践而习得。
附图说明
24.通过参照附图详细描述其示例实施方式,本发明的上述和其它特征及优点将变得更加明显。
25.图1为本发明的杯缝定位方法的流程示意图;
26.图2示出了本发明的一较佳实施例的杯缝定位方法的具体流程;
27.图3示出了图2中图像预处理的具体流程;
28.图4示出了图2中杯壁定位的具体流程;
29.图5示出了图2中杯缝定位的具体流程;
30.图6示出了图2中纸杯成像的示意图;
31.图7为本发明的一较佳实施例的纸杯检测系统的结构示意图。
具体实施方式
32.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的实施方式;相反,提供这些实施方式使得本发明将全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。图中相同的附图标记表示相同或类似的结构,因而将省略它们的详细描述。
33.在介绍这里所描述和/或图示的要素/组成部分/等时,用语“一个”、“一”、“该”、“所述”和“至少一个”用以表示存在一个或多个要素/组成部分/等。术语“包含”、“包括”和“具有”用以表示开放式的包括在内的意思并且是指除了列出的要素/组成部分/等之外还可存在另外的要素/组成部分/等。实施方式中可能使用相对性的用语,例如“上”或“下”以描述图标的一个组件对于另一组件的相对关系。能理解的是,如果将图标的装置翻转使其上下颠倒,则所叙述在“上”侧的组件将会成为在“下”侧的组件。此外,权利要求书中的术语“第一”、“第二”等仅作为标记使用,不是对其对象的数字限制。
34.如图1所示,本发明提供的一种杯缝定位方法100主要包括:
35.步骤s1、获取纸杯的杯体图像。
36.步骤s2、对杯体图像进行图像预处理,以获得至少包含有纸杯的杯底特征或者杯口特征的杯体梯度图像。
37.步骤s3、根据杯体梯度图像进行杯底定位或者杯口定位,相应确定纸杯的杯底位置或者杯口位置。
38.步骤s4、根据杯底位置或者杯口位置对杯体梯度图像进行杯壁定位,确定纸杯的环形杯壁区域。
39.步骤s5、利用区块梯度扫描算法对环形杯壁区域进行扫描,确定杯体的杯缝位置。
40.在其它实施例中,本发明在确定杯缝位置之后还可进一步包括:
41.步骤s6、对杯缝位置以外的杯体图像进行污点检测。
42.较佳地,在步骤s1中,当纸杯被传送到工业相机的视野下时,可触发频闪球积分光源并拍照来获取杯体图像,例如可为一完整的杯体图像。
43.在一些实施例中,在步骤s2中,可以对完整的杯体图像进行图像预处理,也可对部分杯体图像进行预处理,但是需要获得至少包含有纸杯的杯底特征或者杯口特征的杯体梯度图像。在步骤s2还可进一步包括:对杯体图像进行灰度化处理,获得灰度图像。并且,可通过对灰度图像使用引导滤波算法剔除干扰点,以获得滤波后图像;以及通过对滤波后图像进行sobel梯度算法来得到杯体梯度图像。
44.在一些实施例中,在步骤s3中,是对杯体梯度图像进行杯底或者杯口的hough圆检测,以相应获得纸杯的杯底拟合圆或者杯口拟合圆,从而确定杯底位置或者杯口位置。
45.进一步的,在步骤s4中,是根据杯底拟合圆或者杯口拟合圆的中心位置确定出环形杯壁区域。
46.其中,对于杯缝位置的确定如图5所示,步骤s5可包括:
47.步骤s51、对环形杯壁区域进行区块梯度扫描。
48.其中,在进行扫描之前,可确定矩形扫描块大小和每次扫描的位移量;以及确定扫描块的起始位置和扫描方向。
49.步骤s52、记录梯度大于设定阈值的轮廓点。
50.在此步骤中,例如,可通过计算扫描块所扫描位置的平均像素灰度,以及计算整个图像的平均像素灰度,其中,每一扫描块的平均像素灰度减去整个图像的平均像素灰度即为每一扫描块的梯度,记录梯度高于设定阈值的轮廓点。
51.步骤s53、根据所得到的轮廓点进行直线拟合,获得杯缝拟合直线。
52.步骤s54、根据杯缝拟合直线确定杯缝位置。
53.如图2所示,其示出了本发明的一较佳实施例的杯缝定位方法的具体流程,其例如可包括:
54.第一步,抓取图像:
55.当待检测纸杯被传送到工业相机视野下,可触发频闪光源并拍照,以抓取纸杯得到杯体图像。抓取的杯体图像要将杯底和杯缝边缘尽可能清晰的呈现出来,以供进行后续的杯缝定位。在其它实施例中,也可以通过抓取杯顶的杯口和杯缝边缘来进行后续的杯缝定位。
56.第二步,图像预处理:
57.对工业相机获取的当前杯体图像进行预处理,如图3所示,其例如可包括有:
58.步骤s21、对杯体图像进行灰度化处理,获得灰度图像。
59.若当前纸杯图像为灰度图像,则可跳过灰度化处理。
60.步骤s22、对灰度图像进行滤波,获得滤波后图像。
61.其中,滤波处理可剔除部分干扰点,以较好的保留杯缝、杯底、杯底边缘细节。在一些实施例中,可以采用引导滤波方法进行滤波,引导滤波可以用于降噪、细节平滑、hdr压缩、抠图、去雾以及联合采样等方面。需要说明的是,在其他实施例中,也可以采用其他滤波方式,例如双边滤波方式。在滤波效果上,引导滤波和双边滤波差不多。其中,引导滤波最大的优势在于,可以写出时间复杂度与窗口大小无关的算法,因此在使用大窗口处理图片时,其效率更高。
62.其中,引导滤波的具体算法实现如下:
63.1)假设图像在wk窗口中有如下线性关系:
64.2)根据引导图g,并满足g与q的像素偏差最小,即求最小化值:
[0065][0066]
3)由线性回归方法可得与与
[0067]
4)当引导图像g即为原图i时,
[0068]
其中,代表在wk窗口中灰度方差,|w|代表窗口区域总像素数,μk代表i图窗口灰度均值,pk代表g图窗口灰度均值。
[0069]
因此,当窗口扫描到边缘位置时,则qi=ii,从而保持边缘像素;当窗口扫描在非边缘位置时,则qi=μk,从而平
滑窗口区域。
[0070]
步骤s23、对滤波后图像进行sobel边缘检测,得到杯体梯度图像。
[0071]
纸杯在光源下成像,其杯缝位置的成像较弱,直接定位杯缝很容易误判,而引导滤波融合sobel梯度算法可平滑纸杯弱特征下的伪污点,并且能够增强杯底、杯缝边缘信息,提高杯底、杯缝定位准确度。
[0072]
第三步,杯缝定位:
[0073]
通过杯底定位或者杯口定位,确定纸杯的环形杯壁区域,进而对杯缝进行定位。具体的,如图4所示,包括:
[0074]
步骤s31、对杯体梯度图像进行hough圆检测,获得杯底拟合圆或者杯口拟合圆。
[0075]
结合参考图6,在经过图像预处理之后,对得到的纸杯梯度图像60进行杯底hough圆检测即可获得纸杯的杯底拟合圆61。
[0076]
步骤s32、根据杯底拟合圆或者杯口拟合圆确定中心位置,根据中心位置确定出环形杯壁区域。
[0077]
其中,根据纸杯的杯底拟合圆61可确定杯底的中心位置,进一步的,根据杯底拟合圆的中心位置可确定出环形杯壁区域62,从而实现杯壁定位。在本实施例中,杯缝定位是根据杯底的中心位置来确定杯壁区域的位置,即通过杯底定位和杯壁定位来实现杯缝定位。在其他实施例中,也可以通过杯口的中心位置来确定杯壁区域的位置,即可以通过杯口定位和杯壁定位来实现杯缝定位
[0078]
如图5所示,在杯壁定位之后,即可对环形杯壁区域进行梯度扫描,以确定出杯缝的位置,其中杯缝边缘扫描算法可分为如下步骤:
[0079]
步骤s51、对环形杯壁区域进行区块梯度扫描。其中,结合参考图6,扫描前先确定矩形扫描块63大小以及每次扫描的位移量;确定扫描块的起始位置及扫描方向s,如扫描块的检测区域可以顺时针或者逆时针进行;环形检测区域内可以从内至外、或从外至内扫描。
[0080]
步骤s52、记录梯度大于设定阈值的轮廓点。具体的,计算整个图像的平均像素灰度,并且计算扫描块每一次所扫描位置的平均像素灰度,每一扫描块的平均像素灰度减去整个图像的平均像素灰度即为每一扫描块的梯度,然后通过梯度方向辨别边缘类型,进而筛选需要的边缘,记录梯度高于设定阈值的位置。例如,若从亮度较高的位置突变到亮度较低的位置,触发设定阈值,这种梯度为正,对应边缘应为“明
→
暗”变化的边缘;反之可以根据“暗
→
明”变化的边缘触发设定阈值。其中,梯度的计算方法不以此为限。
[0081]
步骤s53、根据所得到的轮廓点进行直线拟合,获得杯缝拟合直线。扫描结束即可得到所有梯度大于设定阈值的像素位置集合,通过直线拟合法拟合坐标点,获得杯缝拟合直线64。在一些实施例中,采用ransac(random sample consensus)直线拟合方法进行拟合杯缝。其中ransac直线拟合法可根据任意两点确定直线,然后计算剩余点到直线的距离小于给定阈值的位置点数量,从而找到最优的拟合直线,即获得杯缝拟合直线64。
[0082]
可以理解的是,本发明也可通过其它方法拟合直线,例如通过最小二乘法拟合直线,这些并不作为对本发明的限制。但是,ransac直线拟合法要优于最小二乘法拟合直线,因为ransac直线拟合法可消除杯壁污点形成的离散点干扰,该拟合方法可自动舍弃非杯缝边缘的坐标点,即可有效避免污渍对拟合直线位置准确度的影响。而最小二乘法拟合采用全局拟合方式,每个点都会影响拟合直线的位置,故不适合寻找到最佳杯缝位置。拟合算法
会根据所有用于获取最终拟合直线的杯缝坐标点,根据这些坐标点的即可计算出杯缝中心位置。
[0083]
步骤s54、根据杯缝拟合直线即可确定出杯缝位置。具体的,根据杯缝拟合直线64即可确定出杯缝位置65。
[0084]
进一步的,如图2所示,本发明在确定杯缝位置之后,还可对杯缝位置以外的杯体图像进行污点检测,检测的方法可采用现有的各种检测方法,在此不再赘述。
[0085]
如图7所示,本发明还提供了一种纸杯检测系统700,其主要包括有传送机构71、工业相机72以及处理器(图中未示)。其中,传送机构71上可设置有纸杯固定槽711,纸杯固定槽711内可容纳待检测的纸杯712,传送机构71可用于传送待检测的纸杯712至一待检测位置。工业相机72是对应设置于待检测位置,用于获取位于待检测位置上的纸杯712的一杯体图像。工业相机72例如可由一ccd相机721与一工业镜头722组成。处理器可用于执行如上的杯缝定位方法。
[0086]
在本发明中,纸杯检测系统700还可进一步包括有环形的频闪球积分光源73,其是对应于工业相机72设置,可用于在待检测的纸杯712被传送至待检测位置时被触发以供工业相机72进行拍照时光线补偿。
[0087]
通过本发明的杯缝定位方法,能够快速定位随机角度的纸杯的杯缝位置,并可精确检测杯缝处的脏污,从而有效解决了人工目检纸杯脏污的低效率、易疲劳、以及二次污染等缺陷。
[0088]
以上具体地示出和描述了本发明的示例性实施方式。应该理解,本发明不限于所公开的实施方式,相反,本发明意图涵盖包含在所附权利要求的精神和范围内的各种修改和等效布置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1