管理系统、管理方法及计算机可读介质与流程
1.本公开涉及管理系统、管理方法及程序,尤其涉及用于配送的管理。
背景技术:
2.近年来,向住宅等的货物的配送需求正在增加。因此,要求对配送进行管理的系统。关于此,例如,日本特开2009-274875号公报公开了使用保存道路数据、建筑物数据及用地数据的地图数据库来生成配送路线的系统。
3.在日本特开2009-274875号公报所记载的系统中,设想由人进行配送。即,没有设想由自主移动机器人进行配送。在通过自主移动机器人进行配送的情况下,配送是否成功取决于配送目的地的环境。例如,如果是到到达配送目的地为止的移动困难的环境,则自主移动机器人可能配送失败。
技术实现要素:
4.本公开是以上述情况为背景完成的,其目的在于提供能够减少自主移动机器人的配送失败的发生的管理系统、管理方法及程序。
5.由于实现上述目的的本公开的一个方式是管理由向配送目的地配送货物的自主移动机器人进行的配送的管理系统,所述管理系统具有:环境信息取得部,取得环境信息,该环境信息是关于所述配送目的地周边的成为所述自主移动机器人的配送障碍的环境的信息;及配送判定部,基于所述环境信息来判定是否由所述自主移动机器人向所述配送目的地配送所述货物。
6.根据该管理系统,基于关于成为自主移动机器人的配送障碍的环境的信息,来判定是否由自主移动机器人进行配送。因此,由于能够抑制向自主移动机器人的配送困难的配送目的地的配送,所以能够减少自主移动机器人的配送失败的发生。
7.在上述的一个方式中,也可以是,所述环境信息取得部取得关于成为用于进行配送的所述自主移动机器人的移动障碍的环境的信息,来作为所述环境信息。
8.由此,基于关于成为自主移动机器人的移动障碍的环境的信息,来判定是否由自主移动机器人进行配送。因此,能够抑制因移动困难引起的配送失败的发生。
9.在上述的一个方式中,也可以是,关于成为用于进行所述配送的所述自主移动机器人的移动障碍的环境的信息是表示所述配送目的地周边的地面的特征的信息。
10.由此,能够抑制因地面的移动困难引起的配送失败的发生。
11.在上述的一个方式中,也可以是,表示所述地面的特征的信息是表示有无放置于所述地面的废弃物的信息,所述环境信息取得部还取得所述废弃物从所述地面的回收时间表,所述配送判定部基于所述回收时间表和所述货物的配送时间表来判定是否向所述配送目的地配送所述货物。
12.根据这样的管理系统,在确认了放置于地面的废弃物是否在配送时间点也仍然是被放置的状态的基础上,判定可否配送。即,考虑是否由于该废弃物而移动实际上受到妨
碍,来判定可否配送。因此,能够更适当地抑制配送失败的发生。
13.在上述的一个方式中,也可以是,关于成为用于进行所述配送的所述自主移动机器人的移动障碍的环境的信息是气象信息。
14.由此,能够抑制因气象条件引起的配送失败的发生。
15.在上述的一个方式中,也可以是,所述配送目的地是用于接收所述货物的收容器,所述环境信息取得部取得关于成为所述自主移动机器人向所述收容器收容所述货物的障碍的环境的信息,来作为所述环境信息。
16.根据这样的管理系统,基于关于成为自主移动机器人向收容器收容货物的障碍的环境的信息,来判定是否由自主移动机器人进行配送。因此,能够抑制因收容作业困难引起的配送失败的发生。
17.在上述的一个方式中,也可以是,关于成为所述自主移动机器人向所述收容器收容所述货物的障碍的环境的信息是表示所述收容器的位置或所述收容器的容量的信息。
18.由此,能够抑制因收容器的位置或容量引起的无法收容所导致的配送失败的发生。
19.在上述的一个方式中,也可以是,所述配送判定部基于所述自主移动机器人的性能和所述环境信息来判定是否由所述自主移动机器人向所述配送目的地配送所述货物。
20.由此,根据自主移动机器人的性能,来判定是否由自主移动机器人进行配送。因此,能够更准确地减少自主移动机器人的配送失败的发生。
21.用于实现上述目的的本公开的另一个方式是信息处理装置管理由向配送目的地配送货物的自主移动机器人进行的配送的管理方法,所述管理方法包括如下步骤:取得环境信息,该环境信息是关于所述配送目的地周边的成为所述自主移动机器人的配送障碍的环境的信息;及基于所述环境信息来判定是否由所述自主移动机器人向所述配送目的地配送所述货物。
22.根据该管理方法,基于关于成为自主移动机器人的配送障碍的环境的信息,来判定是否由自主移动机器人进行配送。因此,由于能够抑制向自主移动机器人的配送困难的配送目的地的配送,所以能够减少自主移动机器人的配送失败的发生。
23.用于实现上述目的的本公开的另一个方式是一种程序,所述程序使管理由向配送目的地配送货物的自主移动机器人进行的配送的计算机执行如下步骤:环境信息取得步骤,取得环境信息,该环境信息是关于所述配送目的地周边的成为所述自主移动机器人的配送障碍的环境的信息;及配送判定步骤,基于所述环境信息来判定是否由所述自主移动机器人向所述配送目的地配送所述货物。
24.根据该程序,基于关于成为自主移动机器人的配送障碍的环境的信息,来判定是否由自主移动机器人进行配送。因此,由于能够抑制向自主移动机器人进行的配送困难的配送目的地的配送,所以能够减少自主移动机器人的配送失败的发生。
25.发明效果
26.根据本公开,能够提供能够减少自主移动机器人的配送失败的发生的管理系统、管理方法及程序。
27.从以下给出的详细描述和附图中将更充分地理解本公开的上述和其他目的、特征和优点,所述详细描述和附图仅作为说明给出,因此不应被认为是限制本公开。
附图说明
28.图1是表示实施方式涉及的配送系统的系统构成的一例的示意图。
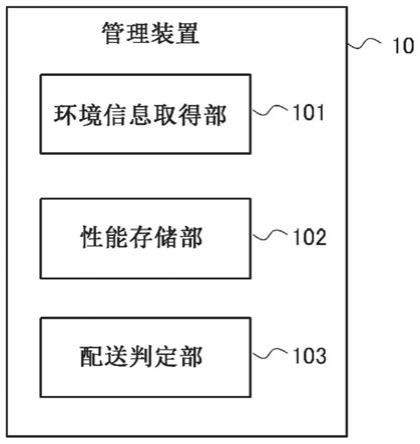
29.图2是表示实施方式涉及的管理装置的功能性结构的一例的框图。
30.图3是表示实施方式涉及的管理装置的硬件构成的一例的框图。
31.图4是表示实施方式涉及的管理装置进行的判定处理的流程的一例的流程图。
32.图5是表示图4中所示的步骤s200的处理的详情的一例的流程图。
具体实施方式
33.以下,参照附图对本发明的实施方式进行说明。
34.图1是表示实施方式涉及的配送系统1的系统构成的一例的示意图。配送系统1包括管理装置10、传感器20及自主移动机器人30。此外,配送系统1是管理由自主移动机器人30进行的配送的系统,也称为管理系统。在配送系统1中,管理装置10与传感器20可通信地连接。另外,管理装置10根据需要也与自主移动机器人30可通信地连接。
35.自主移动机器人30是向配送目的地配送货物的机器人,自主地移动。配送系统1例如具有性能不同的多个类型的自主移动机器人30。自主移动机器人30例如是通过在地面行走而自主地移动的机器人,但也可以是通过在空中飞行而自主地移动的机器人。另外,在地面行走的类型的自主移动机器人30可以是通过驱动车轮而移动的机器人,也可以是通过驱动履带(无限轨道)而移动的机器人。这样,配送系统1可以具备移动性能不同的多个类型的自主移动机器人30。此外,移动性能的不同起因于自主移动机器人30的结构的不同,具体的结构的不同不被限定。例如,移动性能的不同可以起因于移动原理的不同(例如,是基于车轮的移动,还是基于履带的移动,还是基于飞行的移动等),也可以起因于尺寸(例如,车轮或履带等的驱动部分的尺寸等)的不同,也可以起因于材料(例如,是否是具备耐水性的材料等)的不同。由于这样的自主移动机器人30的移动性能的不同,可移动的环境不同。例如,某种类型的自主移动机器人30在地面有台阶的情况下无法移动,与之相对,对其他类型的自主移动机器人30而言,如果是预定高度以下的台阶,即使在地面有台阶,也能够移动。另外,例如,某种类型的自主移动机器人30可以在水坑上行走,也可以在碎石上行走。
36.另外,配送系统1可以具备货物的交接性能不同的多个类型的自主移动机器人30。例如,在配送目的地是送货箱、邮筒等用于接收货物的收容器的情况下,在自主移动机器人30无法接触到收容器的设置高度的情况下,也不能将货物交接到配送目的地。这样,货物的交接性能的不同例如起因于与自主移动机器人30的构造对应的可访问的范围的不同,但也可以因其他原因而在货物的交接性能产生差异。
37.自主移动机器人30例如也可以是小型的机器人。而且,自主移动机器人30也可以通过输送自主移动机器人30的大型的输送装置(例如,车辆)被输送到配送目的地的最近处。例如,大型的输送装置在汽车可通行的道路行驶,将自主移动机器人30输送到配送目的地的最近的预定的地点。自主移动机器人30从该地点自主地移动到配送目的地,在配送目的地通过将货物交接给人或住宅内的机器人或者收容器等来进行配送。
38.为了自主移动机器人30成功配送,自主移动机器人30的性能需要满足配送目的地的环境所要求的基准。在利用不满足该基准的自主移动机器人30而执行了货物的配送的情况下,货物的配送会失败。因此,在本实施方式中,通过使用传感器20预先取得配送目的地
的环境信息,由此来抑制这样的失败。
39.传感器20是感测配送目的地周边的传感器,检测配送目的地周边的环境信息。此外,具体而言,配送目的地周边例如是包含从配送目的地最近的预定的地点(例如,配送目的地的最近的车道)到配送目的地(例如,指定的人物的住宅的玄关或收容器等)的自主移动机器人30的移动线的空间。在此,环境信息是指关于成为自主移动机器人30的配送障碍的环境的信息。具体而言,例如,可以是关于成为用于配送的自主移动机器人30的移动障碍的环境的信息(以下,称为移动环境信息),也可以是关于成为自主移动机器人30向收容器收容货物的障碍的环境的信息(以下,称为收容环境信息)。
40.移动环境信息例如是表示配送目的地周边的地面的特征的信息。表示地面的特征的信息例如可以是表示混凝土、草坪、碎石等这样的地面的种类的信息,也可以是表示地面存在的台阶的高度的信息,也可以是表示由配送目的地周边的气象带来的地面的状态(例如冻结、积雪、水坑)的信息,也可以是表示有无放置于地面的废弃物的信息。另外,移动环境信息也可以是成为移动障碍的气象信息(例如,风速、天气、气温等)。此外,这些信息只是移动环境信息的示例,也可以将妨碍自主移动机器人30的移动的其他信息作为移动环境信息来检测。
41.另外,收容环境信息例如可以是表示送货箱、邮筒等收容器的高度等的位置的信息,也可以是表示收容器的容量的信息。例如,如上所述,根据收容器的设置高度,存在自主移动机器人30无法访问收容器的情况。因此,也可以检测表示收容器的位置的信息。另外,根据收容器的容量,存在无法收容货物的情况。因此,也可以检测表示收容器的容量、即收容器的大小的信息。此外,这些信息只是收容环境信息的示例,也可以检测妨碍自主移动机器人30向收容器收容的其他信息,来作为收容环境信息。
42.传感器20可以散布在进行配送的区域而固定地设置,也可以搭载于用于检测环境信息的自主移动机器人,也可以搭载于配送货物的自主移动机器人30。传感器20将检测到的环境信息发送给管理装置10。
43.具体而言,传感器20可以使用公知的任意的传感器。例如,传感器20可以是拍摄配送目的地周边并取得包含移动环境信息或收容环境信息的图像的照相机(图像传感器)。另外,传感器20不限于照相机,也可以是与要检测的环境信息的种类对应的公知的传感器。例如,为了检测地面的特征,可以将毫米波雷达等传感器用作传感器20,也可以将搭载于在地面行走的机器人等的加速度传感器用作传感器20,也可以将检测在地面行走的机器人的行走时的滑移量的传感器用作传感器20。另外,传感器20也可以是用于检测气象的风速计、温度计等气象传感器。
44.接着,对管理装置10进行说明。图2是表示管理装置10的功能性结构的一例的框图。如图2所示,管理装置10具有环境信息取得部101、性能存储部102、配送判定部103。
45.环境信息取得部101取得关于配送目的地周边的成为自主移动机器人30的配送障碍的环境的信息、即上述的环境信息。环境信息取得部101可以通过从上述的传感器20接收环境信息来取得环境信息,也可以通过从管理环境信息的其他装置接收该环境信息来取得环境信息,也可以取得用户输入的环境信息。此外,用户也可以输入指定禁止自主移动机器人30的移动的区域(例如,在用地内禁止行走的区域)的信息,来作为环境信息。
46.此外,环境信息取得部101也可以通过对从传感器20等接收的信息进行解析处理
来取得环境信息。例如,通过对从传感器20接收的图像进行公知的图像识别处理,可以对地面的特征或状态、有无放置于地面的废弃物、收容器的位置或容量等进行解析。
47.环境信息取得部101将取得的环境信息反映到进行配送的区域的地图数据中。即,确定取得的环境信息是地图上的哪个地点(哪个配送目的地)的环境信息。在环境信息取得部101与环境信息一起取得关于该环境信息的地点的位置信息的情况下,使用该位置信息,将该环境信息与地图上的地点相关联。例如,在搭载于自主移动机器人的传感器20检测环境信息的情况下,该自主移动机器人将该环境信息的检测位置发送给管理装置10。由此,环境信息取得部101也可以与环境信息一起取得关于该环境信息的检测地点的位置信息。另外,例如,也可以与环境信息一起从用户或其他装置取得表示是相对于哪个地点的环境信息的信息。另外,对于设置位置固定的传感器20,环境信息取得部101也可以基于预先确定的该传感器的设置位置信息,确定是地图上的哪个地点(哪个配送目的地)的环境信息。
48.环境信息取得部101还可以取得其他信息。例如,环境信息取得部101也可以取得放置的废弃物的回收时间表。例如,环境信息取得部101从清扫运营商的管理服务器等取得回收时间表。
49.性能存储部102存储进行配送的自主移动机器人30各自的性能信息(规格)。该性能信息包含关于移动性能及货物的交接性能的信息。此外,在后述的配送判定部103中,在仅参照移动性能来判定可否由自主移动机器人30进行配送的情况下,性能存储部102可以仅存储移动性能。另外,同样地,在配送判定部103中,在仅参照货物的交接性能来判定可否由自主移动机器人30进行配送的情况下,性能存储部102可以仅存储货物的交接性能。
50.配送判定部103基于环境信息取得部101取得的环境信息来判定是否由自主移动机器人30向配送目的地配送货物。例如,在指定货物的配送目的地时,配送判定部103参照反映了环境信息的地图,确定向该配送目的地配送货物所需的性能。然后,配送判定部103参照性能存储部102,判定是否存在具有所需的性能的自主移动机器人30。由此,配送判定部103判定是否由自主移动机器人30向配送目的地配送货物。这样,配送判定部103也可以基于自主移动机器人30的性能和环境信息来判定是否由自主移动机器人30向配送目的地配送货物。由此,根据自主移动机器人30的性能,判定是否由自主移动机器人30进行配送。因此,能够更准确地减少自主移动机器人30的配送失败的发生。
51.例如,在向配送目的地的移动路径上存在台阶的情况下,如果存在具备能够在该台阶行走的移动性能的自主移动机器人30,则配送判定部103判定为能够由该自主移动机器人30进行配送。与此相对,如果没有具备能够在该台阶行走的移动性能的自主移动机器人30,则配送判定部103判定为不能由自主移动机器人30进行配送。在该情况下,配送判定部103例如决定由配送员(人)实施配送。此外,在此,以台阶为例进行了说明,但关于环境信息表示其他地面的特征的情况,也同样地,配送判定部103进行判定。另外,在上述的示例中,以在地上行走的自主移动机器人30的移动性能为例进行了说明,但对于飞行的自主移动机器人30,配送判定部103也能够同样地进行判定。例如,在环境信息表示风速的情况下,配送判定部103根据是否存在即使在所示的风速的风吹送的环境下也能够飞行的自主移动机器人30,来判定可否由自主移动机器人30进行配送。
52.另外,即使在环境信息要求货物的交接性能的情况下,也是同样的。例如,在配送目的地是送货箱等用于接收货物的收容器、环境信息表示该收容器的高度的情况下,配送
判定部103通过判定是否存在能够接触到该高度的自主移动机器人30,来判定可否由自主移动机器人30进行配送。另外,例如,在配送目的地是收容器、环境信息表示该收容器的容量的情况下,配送判定部103通过判定配送对象的货物的大小是否可进入该收容器,来判定可否由自主移动机器人30进行配送。由此,能够抑制因收容器的位置或容量引起的无法收容而导致的配送失败的发生。
53.特别是,在环境信息表示妨碍移动的废弃物放置于地面的情况下,配送判定部103也可以基于该废弃物的回收时间表、货物的配送时间表,来判定自主移动机器人30是否向配送目的地配送货物。根据货物的配送预定日期时间是废弃物的回收预定日期时间之前还是之后,该货物的配送所要求的自主移动机器人30的性能不同。因此,在货物的配送预定日期时间为废弃物的回收预定日期时间之前的情况下,配送判定部103根据是否存在具有即使存在该废弃物也能够到达配送目的地的移动性能的自主移动机器人30,由此判定可否由自主移动机器人30进行配送。与此相对,在货物的配送预定日期时间为废弃物的回收预定日期时间之后的情况下,配送判定部103视为不存在该废弃物,确定能够到达配送目的地的移动性能。然后,配送判定部103根据是否存在具有所确定的移动性能的自主移动机器人30,判定可否由自主移动机器人30进行配送。由此,在确认了放置于地面的废弃物是否在配送时间点也仍然是被放置的状态的基础上,判定可否配送。即,考虑是否由于该废弃物而移动实际上受到妨碍,来判定可否配送。因此,能够更适当地抑制配送失败的发生。
54.以上,对管理装置10的功能进行了说明。管理装置10的上述的功能只是一例,可以省略上述功能的一部分,也可以追加其他功能。例如,在环境信息要求预定的基准以上的性能的情况下,配送判定部103也可以根据配送对象的货物是否具有预定的性质(例如高价),来判定可否由自主移动机器人30进行配送。例如,在存在台阶的情况下,也可以进行不使自主移动机器人30配送高价的货物等的判定。另外,也可以具有基于反映了环境信息的地图数据来生成行走环境满足预定的条件的路线的功能。例如,也可以具有即使是利用轮椅的人也能够通过的路线的生成功能。
55.接着,对管理装置10的硬件构成的一例进行说明。图3是表示管理装置10的硬件构成的一例的框图。如图3所示,管理装置10包括网络接口150、存储器151及处理器152。网络接口150、存储器151及处理器152经由数据总线等相互连接。
56.网络接口150用于与传感器20等其他的任意的装置通信。网络接口150可以包括例如网络接口卡(nic)。
57.存储器151例如由易失性存储器及非易失性存储器的组合构成。存储器151用于保存由处理器152执行的包含1个以上的命令的软件(计算机程序)及管理装置10的各种处理中使用的数据等。上述的性能存储部102也可以通过存储器151实现。
58.处理器152从存储器151读出并执行软件(计算机程序),由此进行上述的管理装置10的处理。
59.处理器152可以是微型处理器、mpu(micro processor unit:微处理器单元)或cpu(central processing unit:中央处理单元)等。处理器152可以包含多个处理器。
60.这样,管理装置10是作为计算机发挥功能的装置,也称为信息处理装置。
61.此外,上述的程序可以使用各种类型的非暂时性计算机可读介质(non-transitory computer readable medium)来保存,并供给到计算机。非暂时性计算机可读
介质包括有各种类型的实体的记录介质(tangible storage medium:有形存储介质)。非暂时性计算机可读介质的示例包括磁记录介质(例如软盘、磁带、硬盘驱动器)、光磁记录介质(例如光磁盘)、cd-rom(read only memory:只读存储器)cd-r、cd-r/w、半导体存储器(例如,掩模rom、prom(programmable rom:可编程只读存储器)、eprom(erasable prom:可擦除可编程只读存储器)、闪存rom、ram(random access memory:随机存取存储器))。另外,程序也可以通过各种类型的暂时性计算机可读介质(transitory computer readable medium)供给到计算机。暂时性计算机可读介质的示例包括电信号、光信号及电磁波。暂时性计算机可读介质可以经由电线及光纤等有线通信路径或无线通信路径将程序供给到计算机。
62.接着,对管理装置10进行的判定处理的流程进行说明。图4是表示管理装置10进行的判定处理的流程的一例的流程图。以下,参照流程图,对处理的流程进行说明。
63.在步骤s100中,环境信息取得部101经由传感器20等取得环境信息。此外,如上所述,环境信息取得部101还可以取得回收时间表。
64.接着,在步骤s200中,配送判定部103基于在步骤s100中取得的信息,判定是否对指定的配送目的地进行由自主移动机器人30进行的货物的配送。
65.图5是表示图4所示的步骤s200的处理的详情的一例的流程图。以下,参照图5,对步骤s200的处理的一例进行说明。
66.在步骤s201中,配送判定部103基于与配送目的地相关的环境信息,确定向该配送目的地配送货物所需的自主移动机器人30的性能。此外,在环境信息表示移动路径上的废弃物的存在的情况下,配送判定部103也可以参照该废弃物的回收时间表来确定配送所需的性能。
67.接着,在步骤s202中,配送判定部103参照性能存储部102,判定是否存在具备在步骤s201中确定的性能的自主移动机器人30。在存在具备所需的性能的自主移动机器人30的情况下,处理进入步骤s203。与此相对,在没有具备这样的性能的自主移动机器人30的情况下,处理进入步骤s204。
68.在步骤s203中,配送判定部103决定由具备所需的性能的自主移动机器人30实施配送。此外,在存在多个具备所需的性能的自主移动机器人30的情况下,配送判定部103也可以决定通过其中具备所需最低限度的性能的自主移动机器人30来实施配送。
69.与此相对,在步骤s204中,配送判定部103判定为无法由自主移动机器人30进行配送,决定由配送员实施配送。
70.以上,对实施方式进行了说明。在本实施方式中,基于作为关于成为自主移动机器人30的配送障碍的环境的信息的环境信息,来判定是否由自主移动机器人30进行配送。因此,由于能够抑制向自主移动机器人30配送困难的配送目的地的配送,所以能够减少自主移动机器人30的配送失败的发生。另外,该环境信息可以是上述的移动环境信息,也可以是上述的收容环境信息。因此,能够抑制因移动或收容作业困难而引起的配送失败的发生。例如,在环境信息是表示地面的特征的信息的情况下,能够抑制因地面的移动困难引起的配送失败的发生。另外,例如,在环境信息包含气象信息的情况下,能够抑制因气象条件引起的配送失败的发生。
71.此外,本发明不限于上述实施方式,在不脱离主旨的范围内可以进行适当变更。
72.从如此描述的公开内容,将显而易见的是,本公开的实施例可以以许多方式变化。
这样的变化不应被认为偏离了本公开的精神和范围,并且对于本领域的技术人员来说显而易见的所有这样的修改旨在包括在所附请求保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1