一种基于卡尔曼滤波算法的数字孪生无砟轨道优化方法与流程
1.本发明涉及无砟轨道领域,尤其涉及一种基于卡尔曼滤波算法的数字孪生无砟轨道优化方法。
背景技术:
2.无砟轨道板因其结构性能好,稳定性强,安全性高等特点而被广泛应用,但在部分区间仍然出现轨道板损伤,尤其在温度高和列车运行密度大的区域。在夏季高温天气下会出现上拱贯通离缝,给列车运行带来很大隐患。而在冬季不仅温度低,昼夜温差也较大,会导致轨道板承受较大的负温度梯度载荷,轨道板不仅会出现离缝现象,还存在宽窄接缝,对轨道板的结构带来了严重破坏。
3.轨道板与填充砂浆层的粘结处作为轨道结构体系中最薄弱环节,其所产生的离缝问题将严重影响高速铁路行车速度与安全。国内学者和科研机构针对无砟轨道板结构存在的问题,在前人研究的基础上,结合国内外维修实践,提出了大量轨道板病害检测与修复的方法。但由于轨道施工质量的误差、线路下基础的变形、维修经验不足和运行时间较短,维护效率的影响并不显著。为完善轨道高速铁路养护技术体系,提高养护维修效率,降低养护维修成本,必须对无砟轨道板的结构病害进行调查,制定相应的技术措施。
4.由于轨道结构复杂,而且外界温度一年四季温差很大,多层结构体系难以协调,导致离缝病害出现。所以针对轨道板,建立一套具有监测和预测功能的优化系统,对轨道板的安全运行具有重要的实际意义。
技术实现要素:
5.本发明要解决的技术问题和提出的技术任务是对现有技术方案进行完善与改进,提供一种基于卡尔曼滤波算法的数字孪生无砟轨道优化方法,以达到提高轨道板安全运行的目的。为此,本发明采取以下技术方案。
6.一种基于卡尔曼滤波算法的数字孪生无砟轨道优化方法,包括以下步骤:
7.1)通过高速铁路轨道监测系统,采集气候环境参数与轨道板结构参数,其中气候环境参数包括温度、风速、阳光辐射,轨道板结构参数包括轨道板位移;
8.2)获取采集的气候环境参数与轨道板结构参数,并通过轨道数字孪生分析预测系统进行参数预测,得到轨道板服役状态的优化方案,轨道数字孪生分析预测系统基于卡尔曼滤波算法,根据气候环境参数与轨道板结构参数,并利用现代控制理论建立状态空间,预测服役参数,并得到符合当前轨道板服役状态的优化方案。其中,服役参数包括对轨道板温度参数和轨道板位移参数;
9.3)基于有限元热结构耦合方法,建立轨道板虚拟样机模型,对轨道板进行热结构耦合仿真分析,对新优化方案进行验证,仿真分析包括层间位移和应力分布分析;
10.4)将优化方案验证结果与当前方案进行差值分析,作为输入偏差,重新返回至轨道数字孪生分析预测系统,对当前方案进行更新,直至得到符合当前甚至未来设定时间段
内的新优化方案。
11.本技术方案在进行优化设计的同时,能够对现有的无砟轨道服役性能进行监测和预测,保证无砟轨道运行的安全性,避免监测和预测的滞后。
12.作为优选技术手段:在步骤2)中,利用现代控制理论建立轨道监测系统状态空间,输入参数为温度湿度、日照辐射、轨道板初始位移,输出参数为轨道板当前状态以及未来状态的内部温度梯度参数。
13.作为优选技术手段:步骤2)中,进行方案优化时,将现有轨道板的结构方案与有限元验证结果进行对比,得到新的轨道板植筋优化方案。
14.作为优选技术手段:在步骤3)中,在进行仿真分析时,考虑相邻轨道板和边界条件的影响,轨道板虚拟样机模型为无砟轨道结构空间三维实体模型,且采用多块整板的模型,有限元分析时以中间整板作为分析对象,分析温度载荷对轨道板层间位移和离缝面积的影响;轨道板虚拟样机模型包括支承层、砂浆层、轨道板、扣件和钢轨;其输入参数包括轨道板结构参数、环境温度和轨道板内部温度梯度参数,输出为轨道板的应力、应变和层间离缝面积参数,以对轨道板优化方案进行定量评价。
15.作为优选技术手段:所述的高速铁路轨道监测系统包括用于检测轨道板内部温度的电阻式温度传感器、检测湿度的湿度传感器、检测太阳辐射的太阳辐射传感器、检测风速风向的风速风向传感器。
16.作为优选技术手段:在步骤2)中,卡尔曼滤波算法包括以下步骤:
17.引入一个离散控制过程的轨道板系统;轨道板系统可用一个线性随机微分方程来描述:
18.x(k)=a*x(k
‑
1)+b*u(k)+w(k)
19.再加上轨道板系统的测量值:
20.z(k)=h*x(k)+v(k)
21.上两式子中,x(k)是k时刻的轨道板系统状态,u(k)是k时刻对轨道板系统的控制量;a和b是轨道板系统参数,轨道板系统输入为温度与结构参数,输出为应力应变位移参数,属于多输入多输出系统,输出为矩阵; z(k)是k时刻的测量值,h是测量系统的参数,由于轨道监测系统为多测量系统,h为矩阵;w(k)和v(k)分别表示过程和测量的噪声,即偏差;
22.利用轨道监测系统的测量值来预测下一时刻的轨道板系统的状态;假设现在的系统状态是k,可以基于系统的上一状态而预测出现在状态:
23.x(k|k
‑
1)=a*x(k
‑
1|k
‑
1)+b*u(k)
24.上式中,x(k|k
‑
1)是利用上一状态预测的结果,x(k
‑
1|k
‑
1)是上一轨道板系统状态最优的结果,u(k)为现在状态的控制量,如果没有控制量,它可以为0;
25.到此为止,轨道板系统结果已经更新,对应于x(k|k
‑
1)的协方差还没更新;用p表示协方差:
26.p(k|k
‑
1)=a*p(k
‑
1|k
‑
1)+a'+q
27.上式中,p(k|k
‑
1)是x(k|k
‑
1)对应的协方差,p(k
‑
1|k
‑
1)是x(k
‑
1|k
‑
1)对应的协方差,a'表示a的转置矩阵,q是系统过程的协方差;实现对轨道板系统参数的预测;
28.根据现在状态的预测结果,收集现在状态的测量值;结合预测值和测量值,可以得到现在状态(k)的最优化估算值x(k|k):
29.x(k|k)=x(k|k
‑
1)+kg(k)*x(k|k
‑
1)
30.其中kg为卡尔曼增益:
31.kg(k)=p(k|k
‑
1)*h'/(h*p(k|k
‑
1)*h'+r)
32.到现在为止,已经得到k状态下最优的估算值x(k|k);为使卡尔曼滤波器不断的运行下去直到系统过程结束,还要更新k状态下x(k|k)的协方差:
33.p(k|k)=(i
‑
kg(k)*h)*p(k|k
‑
1)
34.其中i为1的矩阵,算法自回归的运算下去。
35.有益效果:本技术方案实现气象参数、轨道板温度与关键位置变形的变量参数预测,基于卡尔曼滤波算法,根据过去和目前轨道板及环境参数,确定无砟轨道当前以及未来服役状态。运用有限元分析方法,建立无砟轨道结构空间三维实体虚拟样机模型,仿真分析不同温度载荷下的轨道板层间位移和应力分布等特性,对不同的轨道板优化方案进行验证分析,最终得到最优方案,在保证成本的同时,保证无砟轨道运行的可靠性。
36.通过采集轨道板的气候环境和力学数据,有效的对轨道服役状态进行预测分析。轨道数字孪生分析预测系统是基于数字孪生的概念,数字孪生是充分利用物理模型、传感器更新、运行历史等数据,集成多学科、多物理量、多尺度、多概率的仿真过程,在虚拟空间中完成映射,从而反映相对应的实体装备的全生命周期过程。数字孪生是一种超越现实的概念,可以被视为一个或多个重要的、彼此依赖的装备系统的数字映射系统。卡尔曼滤波算法是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法,实现系统的优化与更新。利用轨道数字孪生分析预测系统,可有效解决无砟轨道病害监测与优化时效性滞后的问题。从而有效对轨道板的服役状态进行监测和预测,大幅度降低因温度变化带来的轨道板损害风险,解决现有的无砟轨道服役性能监测、预测、优化滞后的问题。
附图说明
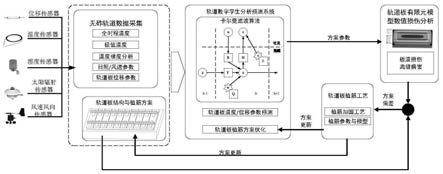
37.图1为本发明的流程图。
38.图2为本发明的无砟轨道结构示意图。
39.图3为本发明的有限元虚拟样机模型及仿真结果图。
40.图4为本发明的单根植筋方案图。
41.图5为本发明的4/6/8/10根植筋方案布局图。
42.图6为本发明的不同植筋方案离缝面积对比图。
具体实施方式
43.以下结合说明书附图对本发明的技术方案做进一步的详细说明。
44.如图1所示,本发明包括以下步骤:
45.一、通过高速铁路轨道监测系统,采集气候环境参数与轨道板结构参数,其中气候环境参数包括温度、风速、阳光辐射,轨道板结构参数包括轨道板位移;所述的高速铁路轨道监测系统包括用于检测轨道板内部温度的电阻式温度传感器、检测湿度的湿度传感器、检测太阳辐射的太阳辐射传感器、检测风速风向的风速风向传感器。
46.综合不同温度传感器的特点,为满足现场的温度与精度要求,并保证现场的布置
可靠性,选择pt100型热电阻式温度传感器对轨道板内部温度进行监测。该温度传感器的尺寸大小与设计埋设孔径匹配,便于定位与固定。
47.根据监测试验要求,需采集轨道板内部0mm、50mm、100mm、150mm 和200mm、230mm深度的温度数据。因此,预先截取适当长度的铝管,在铝管上按50mm等间距钻孔,并将温度传感器插入、走线并固定。
48.根据布置方案在轨道板上进行定位、钻孔、清孔和干燥等操作,接着将固定有温度传感器的铝管垂直插入孔中,最后当传感器固定之后灌入混凝土填充—压实—养护。
49.二、获取采集的气候环境参数与轨道板结构参数,并通过轨道数字孪生分析预测系统进行参数预测,得到轨道板服役状态的优化方案,轨道数字孪生分析预测系统基于卡尔曼滤波算法,根据气候环境参数与轨道板结构参数,并利用现代控制理论建立状态空间,预测服役参数,并得到符合当前轨道板服役状态的优化方案;其中,服役参数包括对轨道板温度参数和轨道板位移参数;
50.1)卡尔曼滤波算法如下。最初提出的卡尔曼滤波基本理论只适用于状态方程和量测方程均为线性的随机线性高斯系统。但是大部分系统是非线性的,其中还有许多是强非线性的。非线性估计的核心就在于近似,给出非线性估计方法的不同就在于其近似处理的思想和实现手段不同。
51.非线性离散系统状态方程和观测方程的一般形式如下所示
[0052][0053]
式中:u
k
∈r
r
为输入向量;w
k
∈r
p
和v
k
∈r
q
均为高斯白噪声信号(偏差),且互不相关,其统计特性为:
[0054]
其中,
[0055]
式中,q
k
为过程激励协方差矩阵,r
k
为观测协方差矩阵。f(x
k
‑1,u
k
‑1)是一个非线性状态转换函数,g(x
k
‑1,u
k
‑1)是一个非线性量测函数。每一个时刻点,根据一阶泰勒展开将f(x
k
‑1,u
k
‑1),g(x
k
‑1,u
k
‑1)线性化,即将非线性状态函数 f(
·
,
·
)和非线性量测函数g(
·
,
·
)围绕滤波值展开泰勒级数,并略去二阶以上项,得到
[0056][0057][0058]
定义根据式(1)、式(2)和式(3)可以得到非线性系统线性化后只与状态变量有关的表达式,如下
[0059][0060]
式4中,注意到并非x
k
的函数,并非x
k
的函数,其他关键参数或者方程为:
[0061]
滤波方程初始条件p0=var(x0)
[0062]
状态先验估计值
[0063]
误差协方差先验估计值
[0064]
增益矩阵
[0065]
状态后验估计值
[0066]
误差协方差后验估计值p
k
=(i
‑
k
k
h
k
)p
k,k
‑1[0067]
2)具体实现过程如下。首先,引入一个离散控制过程的系统。轨道板系统可用一个线性随机微分方程来描述:
[0068]
x(k)=a*x(k
‑
1)+b*u(k)+w(k)
[0069]
再加上轨道板系统的测量值:
[0070]
z(k)=h*x(k)+v(k)
[0071]
上两式子中,x(k)是k时刻的轨道办系统状态,u(k)是k时刻对轨道版系统的控制量。a和b是轨道板系统参数,轨道板系统输入为温度与结构参数,输出为应力应变位移等参数,属于多输入多输出系统,他们为矩阵。z(k)是k时刻的测量值,h是测量系统的参数,由于轨道监测系统为多测量系统,h为矩阵。w(k)和v(k)分别表示过程和测量的噪声(偏差)。
[0072]
利用轨道监测系统的测量值,来预测下一时刻轨道板系统的状态。假设现在的轨道板系统状态是k,可以基于轨道板系统的上一状态而预测出现在状态:
[0073]
x(k|k
‑
1)=a*x(k
‑
1|k
‑
1)+b*u(k)
………
(5)
[0074]
式(5)中,x(k|k
‑
1)是利用上一状态预测的结果,x(k
‑
1|k
‑
1)是上一轨道板系统状态最优的结果,u(k)为现在状态的控制量,如果没有控制量,它可以为0。
[0075]
到现在为止,我们的轨道板系统结果已经更新了,可是,对应于x(k|k
‑
1)的协方差还没更新。我们用p表示协方差:
[0076]
p(k|k
‑
1)=a*p(k
‑
1|k
‑
1)+a'+q
………
(6)
[0077]
式(6)中,p(k|k
‑
1)是x(k|k
‑
1)对应的协方差,p(k
‑
1|k
‑
1)是x(k
‑
1|k
‑
1)对应的协方差,a'表示a的转置矩阵,q是系统过程的协方差。式(5)和(6)就是卡尔曼滤波算法5个主要公式当中的前两个,也就是对轨道板系统参数的预测。
[0078]
现在我们有了现在状态的预测结果,然后我们再收集现在状态的测量值。结合预测值和测量值,我们可以得到现在状态(k)的最优化估算值x(k|k):
[0079]
x(k|k)=x(k|k
‑
1)+kg(k)*x(k|k
‑
1)
………
(7)
[0080]
其中kg为卡尔曼增益:
[0081]
kg(k)=p(k|k
‑
1)*h'/(h*p(k|k
‑
1)*h'+r)
………
(8)
[0082]
到现在为止,我们已经得到了k状态下最优的估算值x(k|k)。但是为使卡尔曼滤波
器不断的运行下去直到系统过程结束,我们还要更新k状态下x(k|k)的协方差:
[0083]
p(k|k)=(i
‑
kg(k)*h)*p(k|k
‑
1)
………
(9)
[0084]
其中i为1的矩阵。当系统进入k+1状态时,p(k|k)就是式(6)的p(k
‑
1|k
‑
1)。这样,算法就可以自回归的运算下去。
[0085]
三、基于有限元热结构耦合方法,建立轨道板虚拟样机模型,进行仿真分析,对新优化方案进行验证,仿真分析包括层间位移和应力分布分析;
[0086]
在进行仿真分析时,考虑相邻轨道板和边界条件的影响,轨道板虚拟样机模型为无砟轨道结构空间三维实体模型,且采用多块整板的模型,有限元分析时以中间整板作为分析对象,分析温度载荷对轨道板层间位移和离缝面积的影响。
[0087]
如图2所示,轨道板虚拟样机模型包括支承层3、ca砂浆层4、轨道板2、扣件和钢轨1;ca砂浆层厚0.03m,弹性模量取为7000mpa,ca砂浆层的支承刚度在非离缝区域采用线性弹簧单元模拟,离缝通过定义非线性弹簧单元来模拟。
[0088]
砂浆层垂向拉应力超过粘滞力时(取0.5mpa),导致轨道板与砂浆层脱离,进而产生轨道板层间损伤。
[0089]
如图3所示为热结构耦合有限元仿真部分结果,轨道板、砂浆层以及钢轨的应力和变形云图。通过轨道板变形量、离缝面积、应力变化来评估目前轨道板的服役状态。
[0090]
四、将优化方案验证结果与当前方案进行差值分析,作为输入偏差,重新返回至轨道数字孪生分析预测系统,对当前方案进行更新,直至得到符合当前甚至未来设定时间段内的新优化方案。
[0091]
具体实施方案如下:
[0092]
轨道板植筋加固是轨道板维修和加强的常用手段,可以大大提升轨道板的使用寿命和安全性,当目前的轨道板服役状态出现病害时,就需要通过植筋优化进行处理。图4所示为单根植筋加固示意图,筋锚固的方式是从轨道板3的上表面钻孔并穿过砂浆层4到支承层5,剪力筋1周围和上部的空隙用植筋胶2密封住。预加固植筋锚固的主要作用在于通过增加界面的断裂韧度和剪切强度,以提供限制产生轨道板过大上拱的竖向约束力。
[0093]
轨道数字孪生分析预测系统不仅对轨道板的环境参数,内部温度梯度进行监测和预测,卡尔曼滤波算法还会根据目前轨道板服役参数对现有的轨道板方案提出优化建议,如图5所示为4、6、8、10四种可能的植筋优化方案示意。利用步骤三的有限元热
‑
结构耦合方法,对新的轨道板植筋优化方案进行仿真,得到轨道板当前方案和新优化方案在实时温度梯度等环境参数下的轨道板应力、变形以及离缝面积等仿真数据,两种方案对比得到最佳轨道优化方案。
[0094]
如图6为植筋前后轨道板离缝面积对比曲线。在整体温度载荷下,经过植筋修复后,轨道板离缝面积占比大大缩小,植筋前轨道板在整体温度载荷下,离缝面积占比最高可达27%左右。当植筋数量大于4根时,在整个正梯度温度范围内,离缝面积都减小到5%以内,植筋10根时候,基本消除轨道板离缝现象的发生。
[0095]
新的优化方案与目前的轨道方案的应力、应变、变形位移以及离缝面积等差值作为反馈噪声信号,轨道数字孪生分析预测系统,对系统的状态空间进行更新,以实现下一轮的轨道参数预测与方案优化。
[0096]
以上所示的一种基于卡尔曼滤波算法的数字孪生无砟轨道优化方法是本发明的
具体实施例,已经体现出本发明实质性特点和进步,可根据实际的使用需要,在本发明的启示下,对其进行等同修改,均在本方案的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1