一种针对柱面视觉目标的线扫机构的标定方法与流程
1.本发明属于机器视觉领域,涉及一种针对柱面视觉目标的线扫机构的标定方法。
背景技术:
2.线扫相机能够捕获匀速移动物体的高分辨率图像,适用于高速或高分辨率图像的采集,同时适用在工业中进行轴承等曲面的高精度检测和圆柱状产品表面的花印检测与测量。
3.由于机械安装等原因,使线扫相机很难平行于待测工件的柱面,从而导致采集到的图像变形,最终很难得到可以用于测量或者缺陷检测的图片。现有方法是通过机械限位等手段保障线扫相机与测量柱面保持平行且设定合适的速度得到不变形的图片,然而依旧存在以下问题:一是保证最终线扫机构平行的加工难度非常大,成本不易把控;二是安装要求非常高,一个小零件安装不平行很可能导致线扫相机无法正常使用;三是人为设定待测物体的运行速度或者线扫相机的行频参数需要多次采集多次调整,耗时长、效率低而且精度没保障。
技术实现要素:
4.为解决上述问题,提供一种保障线扫机构能够与待测工件的柱面保持平行的成本可控、避免图像变形的标定方法,本发明采用了如下技术方案:
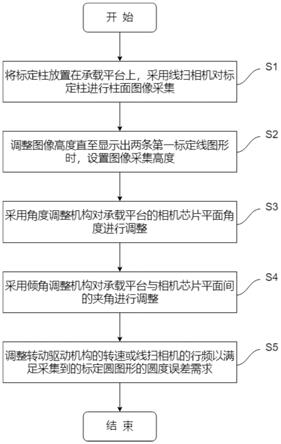
5.本发明提供了一种针对柱面视觉目标的线扫机构的标定方法,用于对工件的柱面进行视觉采集的线扫机构进行标定,该线扫机构具有承载工件的承载平台、驱动工件转动的转动驱动机构以及线扫相机,其特征在于:采用标定柱对线扫机构进行标定,标定柱的柱面上设置有与轴线平行的第一标定线、多根与第一标定线垂直的第二标定线以及标定圆,标定方法包括以下步骤:步骤s1,将标定柱放置在承载平台上,采用线扫相机对标定柱进行柱面图像采集;步骤s2,根据步骤s1采集得到的图像调整线扫相机采集时的图像高度,直至采集到的柱面图像包含两条与第一标定线相对应的第一标定线图形,将该调整后的图像高度设置为图像采集高度;步骤s3,在图像采集高度下采用线扫相机对标定柱进行柱面图像采集,并获得采集得到的柱面图像中的第一标定线图形与线扫相机的采集线在相机芯片平面上的投影之间的夹角,采用角度调整机构对承载平台的相机芯片平面角度进行调整,使得第一标定线图形与线扫相机的采集线在相机芯片平面上的投影相互平行;步骤s4,采用线扫相机对标定柱进行柱面图像采集,基于采集得到的柱面图像中与第二标定线相对应的第二标定线图形中的第一部分间距和最后一部分间距的像素位置求解出线扫相机的采集线在相机芯片平面上的投影与第一标定线图形的垂直夹角,采用倾角调整机构对承载平台与相机芯片平面之间的夹角进行调整直至线扫相机的采集线在相机芯片平面上的投影与第一标定线图形相互平行;步骤s5,采用线扫相机对标定柱进行柱面图像采集,以线扫相机的采集线在相机芯片平面上的投影为方向,获取采集得到的柱面图像中包含的与标定圆相对应的标定圆图形,当该标定圆图形显示为椭圆形时,根据该椭圆形的长轴与短轴以及长
轴与短轴的倍数,调整转动驱动机构的转速和线扫相机的行频中的至少一个,直至采集得到的柱面图像中的标定圆图形满足设置精度的圆度误差需求。
6.本发明提供的一种针对柱面视觉目标的线扫机构的标定方法,还可以具有这样的技术特征,其中,长轴为经过标定圆图形的中心且平行于线扫相机的采集线在相机芯片平面上的投影的截距,短轴为经过标定圆图形的中心且垂直于长轴的截距。
7.本发明提供的一种针对柱面视觉目标的线扫机构的标定方法,还可以具有这样的技术特征,其中,步骤s1至步骤s5中的柱面图像采集过程中采用光源系统对标定柱进行外部补光。
8.本发明提供的一种针对柱面视觉目标的线扫机构的标定方法,还可以具有这样的技术特征,其中,步骤s2的调整过程为:当采集到的柱面图像中未显示两条与第一标定线相对应的第一标定线图形时,则将图像高度扩大一倍,直至采集到两条第一标定线图形时,将图像高度设置为两条第一标定线图形的间距的2倍。
9.本发明提供的一种针对柱面视觉目标的线扫机构的标定方法,还可以具有这样的技术特征,其中,在步骤s5中仅对转动驱动机构的转速进行调整,该调整为:将转动驱动机构的转速与倍数相除。
10.本发明提供的一种针对柱面视觉目标的线扫机构的标定方法,还可以具有这样的技术特征,其中,在步骤s5中仅对线扫相机的行频进行调整,该调整为:将线扫相机的行频与倍数相乘。
11.发明作用与效果
12.根据本发明的针对柱面视觉目标的线扫机构的标定方法,通过标定柱对线扫机构进行调整并完成标定。该标定过程首先基于线扫相机采集到的图像中所显示的第一标定线图形完成图像采集高度的设置,然后分别基于第一标定线图形与线扫相机的采集线在相机芯片平面上的投影之间的夹角、第二标定线图形间距像素位置差求解出的所采集到的第一标定线图形与采集线在相机芯片平面上的投影的垂直夹角以及与标定柱的标定圆相对应的标定圆图形的长短轴之间的倍数,通过采用角度调整机构、倾角调整机构以及转动驱动机构对承载平台的相机芯片平面角度、承载平台与相机芯片平面的夹角以及转速依次进行调整完成标定。
13.本发明的针对柱面视觉目标的线扫机构的标定方法,不仅完成了承载平台与相机芯片平面的角度、夹角以及转动驱动机构等参数的设置,使得待测工件在线扫机构工作过程中仍能够与线扫相机保持在一个相对平行的状态,还解决了因转速形成的相对运动与线扫相机采集速率不完全匹配而导致的图像形变问题,避免了对线扫机构进行人工调参时出现的高耗低效、无法保障精度等现象。
附图说明
14.图1是本发明实施例中的线扫机构的示意图;
15.图2是本发明实施例中的标定柱的示意图;
16.图3是本发明实施例中的标定柱的展开示意图;
17.图4是本发明实施例中的角度调整机构以及倾角调整机构的示意图;
18.图5本发明实施例中的一种针对柱面视觉目标的线扫机构的标定方法流程示意
图。
具体实施方式
19.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,以下结合实施例及附图对本发明的一种针对柱面视觉目标的线扫机构的标定方法作具体阐述。
20.<实施例>
21.图1是本发明实施例中的线扫机构的示意图。
22.本实施例的实验环境设置于对工件的柱面进行视觉采集的线扫机构上,如图1所示,该线扫机构100具有底座10、设置在底座10上用于承载工件的承载平台11、驱动工件在承载平台11上转动的转动驱动机构以及线扫相机12。
23.转动驱动机构包括电机(图中未示出)和并排设置在承载平台11上的滚筒131、滚筒132,电机能够驱动滚筒转动,使得工件放在滚筒131以及滚筒132上时能够随着滚筒的转速进行匀速转动以配合线扫机构的图像采集。
24.本实施例中的校正装置用于对上述承载平台与相机芯片平面的水平角度、垂直角度以及转动驱动机构的转速进行校正,该校正装置具有标定柱14、角度调整机构16、倾角调整机构17以及控制单元(图中未示出)。
25.图2是本发明实施例中的标定柱的示意图,图3是本发明实施例中的标定柱的展开示意图。
26.如图2及图3所示,标定柱14的柱面上设置有与轴线平行的第一标定线141、10根与第一标定线垂直的第二标定线142以及标定圆143。
27.图4是本发明实施例中的角度调整机构以及倾角调整机构的示意图。
28.如图4所示,倾角调整机构17包括调整板171、第一转轴172以及第一电机(图中未示出)。
29.本实施例中,底座10上设有向上突出的凸起部151,调整板171通过第一转轴172与凸起部151的顶端相铰接。第一转轴172的长度方向与调整板171以及底座10的平面相平行,使得调整板171与底座10之间形成类似于跷跷板的结构,调整板171能够通过第一转轴172相对于底座10摆动从而改变相对于底座10的倾斜角度。另外,调整板171上靠近第一转轴172的位置设有从动齿轮,第一电机的输出端上设有主动齿轮,从动齿轮与主动齿轮相互啮合使得第一电机能够驱动调整板171改变倾斜角度。
30.角度调整机构16包括第二转轴161以及第二电机(图中未示出)。第二转轴161的轴心方向与调整板171垂直,承载平台11通过第二转轴161与调整板171转动连接。本实施例中,承载平台11与调整板171大致平行,该承载平台11能够通过第二转轴161相对于调整板171转动从而改变承载平台11与调整板171之间的平面角度。另外,与第一电机类似,承载平台11底面上的第二转轴161位置处设有从动齿轮,第二电机的输出端上设有主动齿轮,该从动齿轮与主动齿轮相互啮合使得第二电机能够驱动调整板171改变角度。
31.控制单元与线扫相机12通信连接,能够从线扫相机12接收其采集的图像并进行分析;同时,控制单元与转动驱动机构、角度调整机构16以及倾角调整机构17电连接,能够发出电信号控制这些机构的工作,包括:控制转动驱动机构中的转速(即控制该机构中的电机的输出转速,从而以控制两个滚筒的转速达到控制工件的转速);控制角度调整机构16调整
承载平台11的相机芯片平面角度;控制倾角调整机构17调整承载平台11与相机芯片平面之间的夹角。
32.图5是本发明实施例中的一种针对柱面视觉目标的线扫机构的标定方法流程示意图。
33.如图5所示,该标定方法包括以下步骤:
34.步骤s1,将标定柱放置在承载平台上,采用线扫相机对标定柱进行柱面图像采集。
35.本实施例中,步骤s1的具体操作为:首先完成线扫机构100以及校正装置的安装,将角度调整机构、倾角调整机构以及转动驱动机构的参数设置全部复位,对线扫机构100以及校正装置中的硬件模块进行初始化;然后启动转动驱动机构驱动滚筒131、滚筒132开始匀速运动;最后将标定柱14放置在承载平台11上,调整线扫相机12的镜头焦距,并采用光源系统对标定柱14进行外部补光等。
36.其中,在本步骤s1中,采集柱面图像时采用预设的图像高度,该预设图像高度为2000(即2000行像素)。
37.步骤s2,根据步骤s1采集得到的图像调整线扫相机采集时的图像高度,直至采集到的柱面图像包含两条与第一标定线相对应的第一标定线图形,将该调整后的图像高度设置为图像采集高度。
38.当采集到的柱面图像中未显示两条与第一标定线141相对应的第一标定线图形时,则将图像高度扩大一倍,直至采集到两条第一标定线图形时,将图像高度设置为两条第一标定线图形的间距的2倍即为图像采集高度。
39.步骤s3,在图像采集高度下采用线扫相机对标定柱进行柱面图像采集,并获得采集得到的柱面图像中的第一标定线图形与线扫相机的采集线在相机芯片平面上的投影之间的夹角,采用角度调整机构对承载平台的相机芯片平面角度进行调整,使得第一标定线图形与线扫相机的采集线在相机芯片平面上的投影相互平行。
40.步骤s4,采用线扫相机对标定柱进行柱面图像采集,基于采集得到的柱面图像中与第二标定线相对应的第二标定线图形中的第一部分(即图3及图4中示出的10根短线中的第1
‑
5的线段间距)间距和最后一部分(即图3及图4中示出的10根短线中的第5
‑
10线段间距)间距的像素位置求解出线扫相机的采集线在相机芯片平面上的投影与第一标定线图形的垂直夹角,采用倾角调整机构对承载平台与相机芯片平面之间的夹角进行调整直至线扫相机的采集线在相机芯片平面上的投影与第一标定线图形相互平行。
41.本实施例中,垂直夹角的测量过程为:当线扫相机的采集线在相机芯片平面上的投影与第一标定线图形的垂直夹角存在时,则线扫相机所采集到的柱面图像中的第二标定线图形中的各间距是不均匀的,因此根据第二标定线图形中的第一个间距和最后一个间距的像素位置通过三角函数解方程即可计算得出该垂直夹角。
42.步骤s5,采用线扫相机对标定柱进行柱面图像采集,以线扫相机的采集线在相机芯片平面上的投影为方向,获取采集得到的柱面图像中包含的与标定圆相对应的标定圆图形,当该标定圆图形显示为椭圆形时,根据该椭圆形的长轴与短轴以及长轴与短轴的倍数,调整转动驱动机构的转速和线扫相机的行频中的至少一个,直至采集得到的柱面图像中的标定圆图形满足设置精度的圆度误差需求。
43.本实施例中,长轴为经过标定圆图形的中心且平行于线扫相机的采集线在相机芯
片平面上的投影的截距,短轴为经过标定圆图形的中心且垂直于长轴的截距。
44.其中,本步骤的圆度误差需求根据不同型号的线扫机构所设置的像素、行频以及清晰度等参数精度的不同来具体设定。
45.在本实施例的步骤s5中,仅对转动驱动机构的转速进行调整,该调整为:将转动驱动机构的转速与长短轴之间的倍数相除。在其他实施例中,若转动驱动机构的转速不能调整(例如转动驱动机构中的电机为不可调速的电机),则可以仅对线扫相机的行频进行调整,该调整为:将线扫相机的行频与长短轴之间的倍数相乘。
46.在上述步骤s1至步骤s5中进行柱面图像采集过程中,采用光源系统对标定柱14进行外部补光。
47.上述标定完成后,取下标定柱14,将待测工件放置在承载平台11上,即可采用线扫相机12对待测工件的柱面进行图像采集,获得清晰、完整且无形变的柱面图像。
48.实施例作用与效果
49.根据本实施例提供的针对柱面视觉目标的线扫机构的标定方法,采用第一标定线、多根与第一标定线垂直的第二标定线以及标定圆对标定柱进行标注,并根据线扫相机对标定柱进行图像采集时所采集到的图像中所显示的第一标定线图形完成图像采集高度的设置,然后分别基于第一标定线图形与线扫相机的采集线在相机芯片平面上的投影之间的夹角、第二标定线图形间距像素位置差求解出的所采集到的第一标定线图形与采集线在相机芯片平面上的投影的垂直夹角以及与标定柱的标定圆相对应的标定圆图形的长短轴倍数关系,通过采用角度调整机构、倾角调整机构以及转动驱动机构对承载平台的相机芯片平面角度、承载平台与相机芯片平面的夹角以及转速依次进行调整完成标定。
50.上述的标定方法,不仅完成了线扫机构的承载平台与相机芯片平面的角度、夹角以及转动驱动机构等参数的设置,使得待测工件在线扫机构工作过程中仍能够与线扫相机保持在一个相对平行的状态,达到线扫相机能清晰且完全采集到待测工件的柱面的图像效果,还解决了因转速形成的相对运动与线扫相机采集速率不完全匹配而导致的图像形变问题,避免了对线扫机构进行人工调参时出现的高耗低效、无法保障精度等现象。
51.上述实施例仅用于举例说明本发明的具体实施方式,而本发明不限于上述实施例的描述范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1