一种结合事件漏报率和警报误报率的警报性能评估方法
1.本发明涉及一种地震预测警报性能评估方法,本发明可帮助预测者找到高警报成功率、低事件漏报率的理想警报,可有效判断地震与前兆的关系,并可给出定量分数用于比较不同参数、模型的性能,为前兆提取奠定基础。
背景技术:
2.地震可预报性及其假设性检验是评价地震预测/预报模型性能,证明前兆与地震关系的基础技术和重要手段。以往的研究者是在结合模拟实验计算的地震警报以及真实历史地震目录进行预测后,利用假设性检验方法对地震预测模型的性能进行评估。常用的假设性检验方法主要有接收者操作曲线(receiver operating characteristic,roc)、molchan diagram、区域技术分数(area skill score)、赌徒分数(gambling score)、随机地震目录(stochastic seismicity catalogs)等。
3.molchan diagram是地震预测研究中一种应用最广泛的评价方法,通过比较地震漏报率v以及预警时空域占总时空域的比例τ来判断警报是否优于随机猜测。国外学者zechar和jordan在认识到漏报率v的不连续性,结合“水位原则”,构建了置信区间的计算方法。但现有方法只考虑了事件漏报率而忽略了警报成功率的重要性。
4.针对上述问题,基于原始的molchan diagram模型,在考虑事件漏报率的的同时,重视警报成功率的作用,建立了3d molchan diagram方法,可为地震预测方法评估提供更理想且稳健的方法。
技术实现要素:
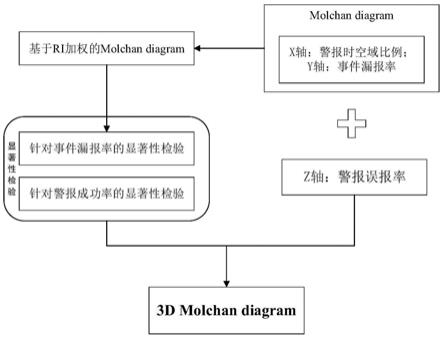
5.本发明基于原始molchan diagram,引入了描述警报误报率的第三个轴,具体思路见(图1),组成的新3d molchan diagram可帮助预测者找到高警报成功率、低事件漏报率的理想警报,其中3d molchan diagram包含了分别针对于事件漏报率和警报成功率的显著性检验,可有效判断地震与前兆间的关系。
6.本发明的目的通过以下步骤技术实现:
7.步骤1)基于zechar提出的relative intensity加权的molchan diagram,修正moclchan diagram以解决其弱鲁棒性的问题,并针对方法进行了其四种性质的分析以探求修正后方法的稳健性。
8.步骤2)针对改进后的molchan diagram,进行事件漏报率和警报成功率的显著性检验,对比验证模型的稳健性。
9.步骤3)在上述修正后的molchan diagram模型,引入第三个轴用以包含警报的警报成功率信息,组成了3d molchan diagram模型。
10.进一步,所述步骤1)的具体方法为:
11.a)在原始模型基础上,引入w(x,y)对molchan diagram进行修正,对于每一个时空单元赋予了一个权重,而对于权重恒定为1,即原始的molchan diagram为全局均一的泊松
分布,而改进的方法则是空间不均一的泊松分布。具体如下式:
[0012][0013][0014]
b)然后对于该方法的四种性质进行分析,通过其性质分析判断其鲁棒性。
[0015]
该方法考虑到了原始molchan diagram的弱鲁棒性,改进的后的molchan diagram相比原始方法具有更强的鲁棒性。
[0016]
进一步,所述步骤2)的具体方法为:
[0017]
a)事件漏报率显著性检验,不同于原始molchan diagram中的事件漏报率显著性检验,事件漏报率的p-value如下式:
[0018][0019]
原假设h0都为:该组警报的事件漏报率或警报成功率与随机猜测无异。当p1<<a,且a<<1时,拒绝原假设,即该组警报从事件漏报率角度要优于随机猜测。b)警报成功率的显著性检验,基于警报成功率先验概率提出的。获得每一天、每单元网格点是否与地震对应的情况,可以进一步得到na个警报中有h个tp1的概率ρ(h=h),即为所有h为h组合的概率之和。ha为真实成功警报数量。
[0020]
p2=ρ(ha≤h≤n
p
)
[0021]
原假设h0:该组警报的警报成功率与随机猜测无异。若p2<<a,且a<<1时,拒绝原假设,即该组警报从警报成功率角度要优于随机猜测。
[0022]
上述方法是针对于警报成功率和事件漏报率的两个显著性检验,通过上述的显著性检验可以很好的判断出方法的有效性及其稳健性。
[0023]
进一步,所述步骤3)的具体方法为:
[0024]
a)在原方法,x轴设置为警报时空域占总时空域的比例,y轴设置为警报时空域占总时空域的比例τ或spatial-temporal correlation window(stcw)以及事件漏报率的基础上,引入了z轴警报误报率。b)在3d molchan diagram中,最优警报位于原点(0,0,0)代表着该组警报中无误报且无漏报。理论上x轴所代表的警报时空域占总时空域的比例是无法等于0的,但是随着地震预测预报研究的发展,stcw会无限接近于0。为评估警报性能,重新定义评估分数如下:
[0025][0026]
式中loss实际上是(stcw,fnr,fdr)到原点的加权距离,(w1,w2,w3)是根据这三个指标设置的权重,通常ω1=ω2=ω3=1。在3d molchan diagram中,loss越高则警报越差。
[0027]
该方法提出了一种新的3d molchan diagram,其中包括三个轴,分别代表警报的警报成功率,地震的事件漏报率和时空预警比例,新提出的loss指标则可更加全面地对警报性能进行评估。
附图说明
[0028]
图1为发明整体思路
[0029]
图2为3d molchan diagram的判断流程
具体实施方式
[0030]
下面结合附图2对本发明“一种结合事件漏报率和警报误报率的警报性能评估方法”作进一步阐述说明。
[0031]
本发明所涉及的一种结合事件漏报率和警报误报率的警报性能评估方法,是对于地震预测方法性能评估的重要技术创新。其中,该模型引入第三个轴用以包含警报的警报成功率信息,组成了3d molchan diagram模型。
[0032]
(一)基于relative intensity加权的molchan diagram
[0033]
模型的改进是在原始的molchan diagram为全局均一的泊松分布,而改进的方法则是空间不均一的泊松分布。具体的如下式,其中τ为原始的molchan diagram,τ*为改进后的molchan diagram;
[0034][0035][0036]
(二)警报显著性检验
[0037]
分别从事件和警报角度出发,首先要确保警报在事件漏报率以及警报成功率上均优于随机猜测,因此首先要对警报的事件漏报率和警报成功率分别进行显著性检验,通过先验概率进行事件漏报率于警报成功率的显著性检验。
[0038]
(三)判断检验流程
[0039]
根据事件漏报率的显著性检验结果p1、警报成功率的显著性检验结果p2以及显著性水平α=0.05,对警报进行如下分类:
[0040]
i类警报:p1≤0.05且p2≤0.05。该警报无论从警报成功率或事件漏报率角度都优于随机猜测,是最为理想的警报种类。
[0041]
ii类警报:p1>0.05且p2≤0.05。该组警报从警报成功率角度是有效的,代表着当警报发生时,人们可以相信并且根据警报进行避险。但是,其在事件漏报率上较差表现会使得人们受到更多漏报事件的威胁。
[0042]
iii类警报:p1≤0.05且p2>0.05。该组警报从事件漏报率角度是有效的,依据该组警报人们可以尽可能多地避免地震灾害带来的危险,但在警报成功率上较差表现使得其可信度较差。
[0043]
iv类警报:p1》0.05且p2>0.05。该组警报无论从警报成功率还是事件漏报率对于地震的预测都无效。
[0044]
i、ii、iii类警报都可有效预测地震,而i类警报是最佳警报,也只有i类警报会计算得到相应的loss。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1