扫塔风险预测方法、模型训练方法、装置、设备及介质与流程
本技术涉及风力发电,尤其是涉及一种扫塔风险预测方法、模型训练方法、装置、设备及计算机可读存储介质。
背景技术:
1、风力发电机是一种将风能转化为电能的设备,包括机舱、发电机、叶片和塔架等。其中,叶片为风力发电机吸收风能的主要部件,是风力发电机重要的前端输入。扫塔是指由于风的作用,使叶片碰撞到塔架。发生扫塔事件后,需要更换叶片、维护塔架等,进而产生巨额损失。
2、目前,主要基于人工经验来判断风力发电机是否会发生扫塔事件,通过人工预测的方式主观性较强,难以得到较为准确的预测结果。
技术实现思路
1、本技术的目的在于提供一种扫塔风险预测方法、模型训练方法、装置、设备及计算机可读存储介质,提高预测结果的准确性。
2、第一方面,本技术提供了一种扫塔风险预测方法,包括:
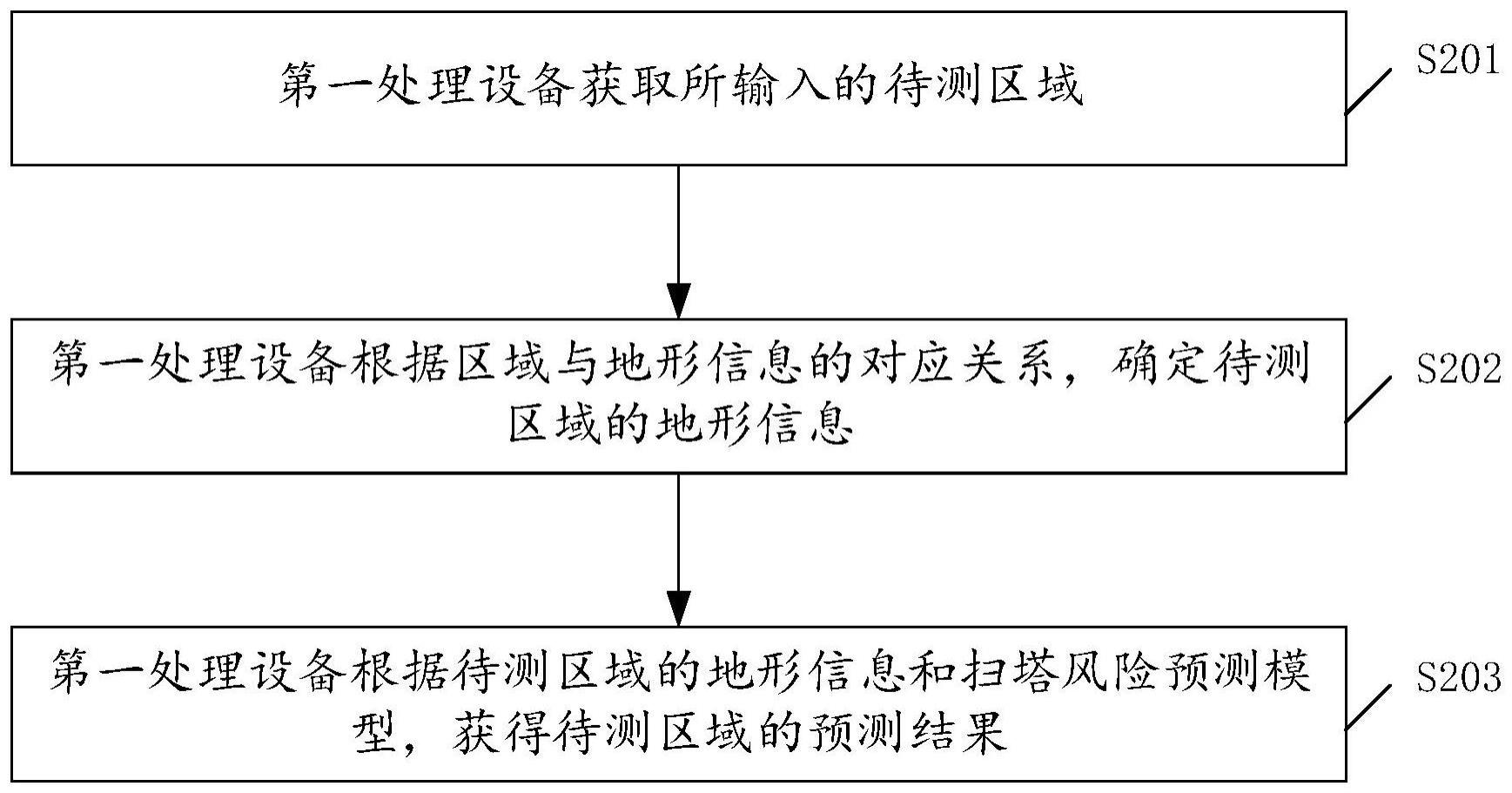
3、获取所输入的待测区域;
4、根据区域与地形信息的对应关系,确定所述待测区域的地形信息;
5、根据所述待测区域的地形信息和扫塔风险预测模型,获得所述待测区域的预测结果;
6、其中,所述扫塔风险预测模型是基于目标区域的地形信息训练所得到,其中,所述目标区域是基于风的来流方向所得到,所述目标区域包括风险区域和正常区域。
7、可选地,所述地形信息通过高程值表征所述地形信息,并且所述区域与地形信息的对应关系通过数字高程模型或地形图被表征,所述根据区域与地形信息的对应关系,获取所述待测区域的地形信息,包括:
8、确定所述待测区域的边界,利用所述边界,对所述数字高程模型或所述地形图进行剪切,以获取所述待测区域内的高程值。
9、可选地,所述确定所述待测区域的边界包括:
10、将所述待测区域划分为多个扇区,以每个扇区的中心线作为风的来流方向并且基于所述风的来流方向和所述待测区域的中心,生成所述待测区域的边界。
11、可选地,所述目标区域为与所述扫塔风险预测模型的运算方式相对应的形状区域。
12、可选地,所述形状区域为矩形区域,所述风的来流方向从所述矩形区域的第一边界经由所述目标位置到所述矩形区域的第二边界,所述目标位置与所述第二边界之间的距离小于所述目标位置与所述第一边界之间的距离,所述第一边界与所述第二边界平行,所述风的来流方向与所述第一边界垂直。
13、可选地,所述地形信息通过高程值被表征,其中所述目标区域的高程值按照预设规则通过地形矩阵被表征;所述扫塔风险预测模型是基于所述地形矩阵训练所获取的模型。
14、可选地,所述危险区域是基于历史发生扫塔风险时对应的风的来流方向所得到;并且
15、所述正常区域是基于历史未发生扫塔风险时对应的风的来流方向所得到。
16、可选地,所述方法还包括:
17、当所述预测结果表征所述待测区域存在扫塔风险时,向用户提示所述待测区域中的风险区域并在所述地形图上呈现所述风险区域;
18、当所述预测结果表征所述待测区域不存在扫塔风险时,向用户提示所述待测区域为正常区域并在所述地形图上呈现所述正常区域。
19、第二方面,本技术提供了一种模型训练方法,包括:
20、根据风的来流方向,确定目标区域,所述目标区域包括风险区域和正常区域;
21、根据区域与地形信息的对应关系,获取所述目标区域的地形信息;
22、利用所述目标区域的地形信息进行模型训练,直至所述模型满足训练停止条件,得到扫塔风险预测模型。
23、可选地,所述根据风的来流方向,确定目标区域,包括:
24、根据发生扫塔风险时风的来流方向,确定目标区域为风险区域;或,
25、根据未发生扫塔风险时风的来流方向,确定目标区域为正常区域。
26、可选地,所述扫塔风险包括叶片与塔架之间的距离小于预设阈值,所述叶片与塔架之间的距离通过激光距离传感器采集得到。
27、可选地,所述地形信息通过高程值表征,所述区域与地形信息的对应关系通过数字高程模型或地形图表征,所述根据区域与地形信息的对应关系,获取所述目标区域的地形信息,包括:
28、确定所述目标区域的边界,利用所述边界,对所述数字高程模型或所述地形图进行剪切,以获取所述目标区域内的高程值。
29、可选地,在所述利用所述目标区域的地形信息进行模型训练之前,所述方法还包括:
30、按照预设规则对所述目标区域的高程值进行调整,得到所述目标区域的地形矩阵;
31、所述利用所述目标区域的地形信息进行模型训练,包括:
32、利用所述目标区域的地形矩阵进行模型训练。
33、第三方面,本技术提供了一种扫塔风险预测装置,包括:
34、获取模块,用于获取所输入的待测区域;根据区域与地形信息的对应关系,确定所述待测区域的地形信息;
35、预测模块,用于根据所述待测区域的地形信息和扫塔风险预测模型,获得所述待测区域的预测结果;
36、其中,所述扫塔风险预测模型是基于包括风险区域和正常区域的目标区域的地形信息训练所得到,其中,所述目标区域是基于风的来流方向所得到,所述目标区域包括风险区域和正常区域。
37、可选地,所述地形信息通过高程值表征所述地形信息,并且所述区域与地形信息的对应关系通过数字高程模型或地形图表征;所述获取模块,用于确定所述待测区域的边界,利用所述边界,对所述数字高程模型或所述地形图进行剪切,以获取所述待测区域内的高程值。
38、可选地,所述目标区域为与所述扫塔风险预测模型的运算方式相对应的形状区域。
39、可选地,所述形状区域为矩形区域,所述风的来流方向从所述矩形区域的第一边界经由所述目标位置到所述矩形区域的第二边界,所述目标位置与所述第二边界之间的距离小于所述目标位置与所述第一边界之间的距离,所述第一边界与所述第二边界平行,所述风的来流方向与所述第一边界垂直。
40、可选地,所述地形信息通过高程值表征,所述目标区域的高程值按照预设规则通过地形矩阵表征;所述扫塔风险预测模型基于所述地形矩阵训练得到。
41、可选地,所述危险区域基于历史发生扫塔风险时对应的风的来流方向得到;并且所述正常区域基于历史未发生扫塔风险时对应的风的来流方向得到。
42、可选地,所述装置还包括提示模块,所述提示模块,用于当所述预测结果表征所述待测区域存在扫塔风险时,向用户提示所述待测区域中的风险区域并在所述地形图上呈现所述风险区域;当所述预测结果表征所述待测区域不存在扫塔风险时,向用户提示所述待测区域为正常区域并在所述地形图上呈现所述正常区域。
43、第四方面,本技术提供了一种模型训练装置,包括:
44、获取模块,用于根据风的来流方向,确定目标区域,目标区域包括风险区域和正常区域;根据区域与地形信息的对应关系,获取所述目标区域的地形信息;
45、训练模块,用于利用所述目标区域的地形信息进行模型训练,直至所述模型满足训练停止条件,得到扫塔风险预测模型。
46、可选地,所述获取模块,用于根据发生扫塔风险时风的来流方向,确定目标区域为风险区域;或,根据未发生扫塔风险时风的来流方向,确定目标区域为正常区域。
47、可选地,所述扫塔风险包括叶片与塔架之间的距离小于预设阈值,所述叶片与塔架之间的距离通过激光距离传感器采集得到。
48、可选地,所述地形信息通过高程值表征,所述区域与地形信息的对应关系通过数字高程模型或地形图表征,所述获取模块,用于确定所述目标区域的边界,利用所述边界,对所述数字高程模型或所述地形图进行剪切,以获取所述目标区域内的高程值。
49、可选地,所述装置还包括调整模块,所述调整模块,用于按照预设规则对所述目标区域的高程值进行调整,得到所述目标区域的地形矩阵;
50、所述训练模块,用于利用所述目标区域的地形矩阵进行模型训练。
51、第五方面,本技术提供一种计算设备,所述计算设备包括处理器以及存储器:
52、所述存储器用于存储计算机程序,并将所述计算机程序传输给所述处理器;
53、所述处理器用于根据所述计算机程序中的指令执行上述任意一项所述的方法。
54、第六方面,本技术提供了一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,所述计算机程序用于执行上述任意一项所述的方法。
55、相对于现有技术,本技术上述技术方案的优点在于:
56、本技术提供了一种扫塔风险预测方法,该方法包括获取所输入的待测区域,根据区域与地形信息的对应关系,确定待测区域的地形信息,然后根据待测区域的地形信息和扫塔风险预测模型,获得待测区域的预测结果。其中,扫塔风险预测模型基于目标区域的地形信息训练得到,该目标区域基于风的来流方向得到,目标区域包括危险区域和正常区域。该方法与基于人工经验来判断风力发电机的扫塔风险相比,能够降低人工预测的主观性以及经验的影响,提高预测结果的准确性。进一步的,基于对待测区域的扫塔风险进行预测得到预测结果后,基于该预测结果,能够为风力发电机的选址提供参考,从而避免将风力发电机安装在高扫塔风险的区域,进一步降低扫塔带来的损失。
- 还没有人留言评论。精彩留言会获得点赞!