可用泊车位识别装置、可用泊车位识别方法和程序与流程
本发明涉及信息处理装置、信息处理方法和程序,更具体地,涉及不会受到泊车位(parking space)的环境的影响且能够实现接近于人类感觉的快速且顺畅的泊车辅助的信息处理装置、信息处理方法和程序。相关申请的交叉参考本申请要求2020年12月21日提交的美国优先权专利申请us 63/128297和2021年3月5日提交的日本优先权专利申请jp 2021-035452的权益,它们的全部内容通过引用而被并入本文中。
背景技术:
1、近年来,人们对泊车辅助系统越来越感兴趣。在日常的各种驾驶场景中存在着使车辆泊车的场面,并且目前需要更安全、更舒适且更便利的泊车辅助系统。
2、例如,已经提出了一种基于相机图像来检测泊车位、且针对已检测到的泊车位执行用于泊车的泊车辅助的技术(参见专利文献1)。
3、引用列表
4、[专利文献]
5、[专利文献1]:日本专利申请特开jp 2017-111803a
技术实现思路
1、[要解决的技术问题]
2、然而,在专利文献1所记载的技术中,在执行泊车位的检测时没有考虑深度信息。
3、因此,在如果无法识别深度就难以执行泊车位的检测的情形下,难以以与人类在检测泊车位时的感觉相近的感觉来判别泊车位,于是恐怕就难以实现顺畅的泊车辅助。
4、本发明是鉴于上述这种状况而做出的,并且特别地,本发明不会受到泊车位的环境的影响而能够实现接近于人类感觉的快速且顺畅的泊车辅助。
5、[解决问题的技术方案]
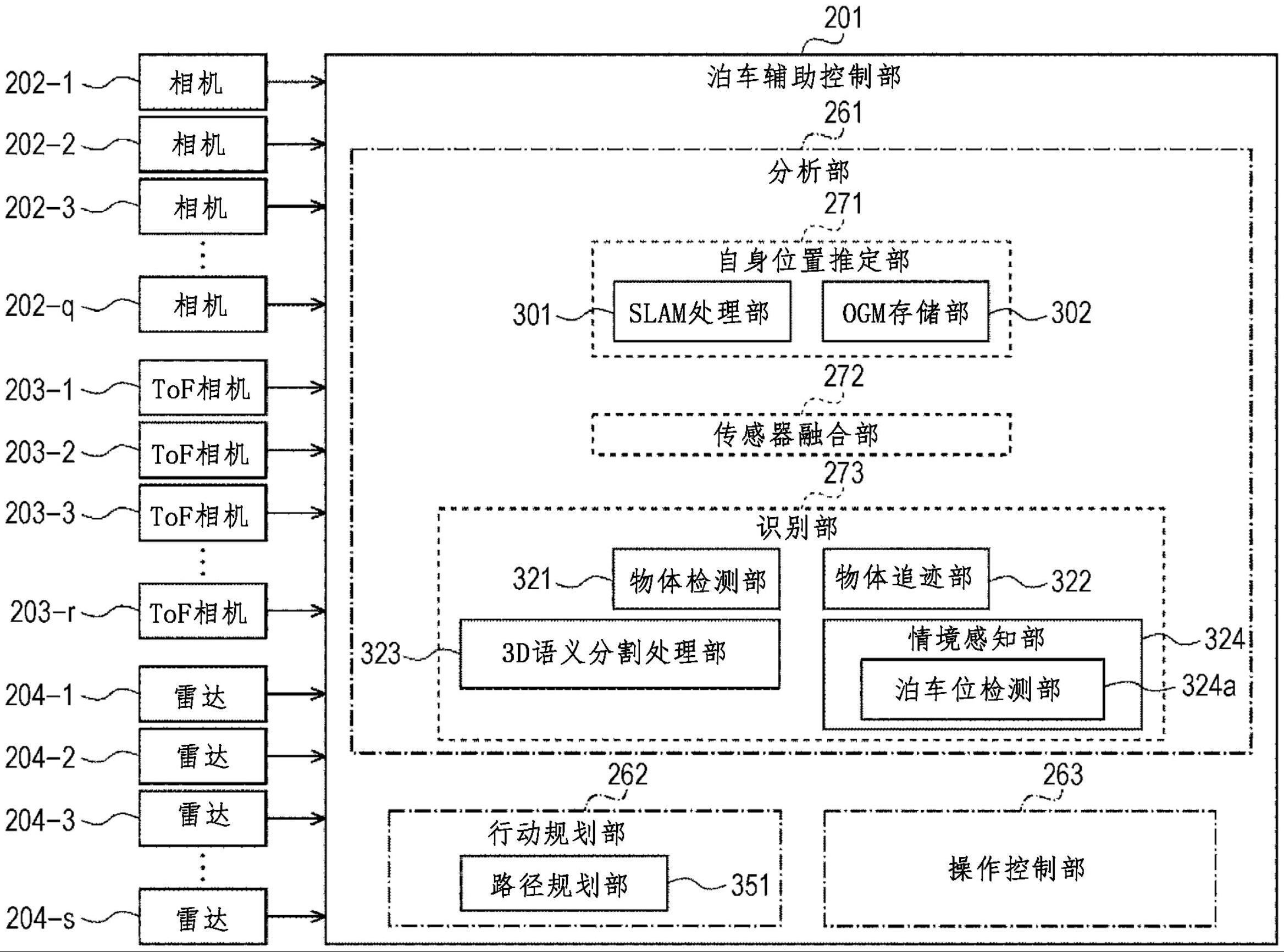
6、根据本发明一个方面的信息处理装置和程序是如下这样的信息处理装置和程序,其包括电路,所述电路被配置为:接收车辆的周围环境的图像数据;接收所述车辆的所述周围环境的深度数据(depth data);基于所述图像数据和所述深度数据来生成具有多个像素单位的3d语义分割图像,所述多个像素单位中的每个像素单位都包括所述深度数据和类别信息;以及基于所述3d语义分割图像来搜索可用的泊车位。
7、根据本发明一个方面的信息处理方法是如下这样的信息处理方法,其包括:生成车辆的周围环境的图像数据;生成所述车辆的所述周围环境的深度数据;基于所述图像数据和所述深度数据来生成具有多个像素单位的3d语义分割图像,所述多个像素单位中的每个像素单位都包括所述深度数据和类别信息;以及基于所述3d语义分割图像来搜索可用的泊车位。
8、在本发明一个方面中,获取车辆的周围环境的图像数据,获取所述车辆的所述周围环境的深度数据,生成具有多个像素单位的3d语义分割图像,所述多个像素单位中的每个像素单位都包括所述深度数据和类别信息,并且基于所述3d语义分割图像来搜索可用的泊车位。
技术特征:
1.一种信息处理装置,其包括电路,
2.根据权利要求1所述的信息处理装置,其中
3.根据权利要求2所述的信息处理装置,其中
4.根据权利要求3所述的信息处理装置,其中
5.根据权利要求4所述的信息处理装置,其中
6.根据权利要求5所述的信息处理装置,其中
7.根据权利要求4所述的信息处理装置,其中
8.根据权利要求7所述的信息处理装置,其中
9.根据权利要求7所述的信息处理装置,其中
10.根据权利要求1所述的信息处理装置,其中
11.根据权利要求2所述的信息处理装置,其中
12.根据权利要求1所述的信息处理装置,其中
13.根据权利要求12所述的信息处理装置,其中
14.根据权利要求13所述的信息处理装置,其中,
15.根据权利要求1所述的信息处理装置,其中
16.根据权利要求15所述的信息处理装置,其中
17.根据权利要求16所述的信息处理装置,其中
18.根据权利要求15所述的信息处理装置,其中
19.一种信息处理方法,包括:
20.一种非暂时性且计算机可读存储介质,在所述存储介质中存储有计算机代码,所述计算机代码在被处理器运行时就致使所述处理器执行如下的信息处理方法,所述信息处理方法包括:
技术总结
本发明的目的是:旨在实现在不会受到泊车位的环境的影响的情况下与人类感觉相近的快速且顺畅的泊车辅助。本发明的技术方案在于:生成具有多个像素单位的3D语义分割图像,所述多个像素单位中的每个像素单位都包括深度数据和类别信息;基于所述3D语义分割图像来搜索可用的泊车位;以及规划去往所搜索到的泊车位的路径并且对车辆进行控制。本发明可以适用于泊车辅助系统。
技术研发人员:今井秀明
受保护的技术使用者:索尼半导体解决方案公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!