一种基于掩码改进的双目结构光三维重建方法与流程
1.本发明涉及三维重建领域,具体涉及一种基于掩码改进的双目结构光三维重建方法。
背景技术:
2.三维重建技术通过深度数据获取、预处理、点云配准与融合、生成表面等过程,把真实场景刻画成符合计算机逻辑表达的数学模型。这种模型可以对如工业应用、文物保护、游戏开发、建筑设计、临床医学等研究起到辅助的作用。
3.双目结构光三维重建法作为主动式的三维重建方法,因其具有高效性及较好的鲁棒性受到大多数研究者的青睐。如图1所示,双目结构光三维重建法的基本原理是通过像目标场景投射带有标记信息的光栅,并在光机左右两边设置两个相机,用以拍摄投射了光栅图案的图像,然后通过分析左右相机拍摄的图像重建目标物体的三维表面信息。
4.由于光是直线传播,目标物体在光照下一定会存在阴影部分,左右相机位置不同,阴影差异可能会很大,这些阴影部分很容易影响三维重建过程中的效果,影响重建精度,重建速度。
技术实现要素:
5.针对现有技术存在的问题,本发明的目的在于提供一种基于掩码改进的双目结构光三维重建方法,以提高双目结构光三维重建的精度和速度。
6.为实现上述目的,本发明采用的技术方案是:一种基于掩码改进的双目结构光三维重建方法,其包括以下步骤:步骤1、进行相机标定得到相机初始参数,然后利用初始参数进行立体校正得到校正的相机参数;步骤2、投射全黑光图像、全白光图像、格雷码图像和相移图像,并用左相机和右相机拍摄下图像;并分别对左相机拍摄的图像和右相机拍摄的图像进行步骤3-6的处理;步骤3、使用校正的相机参数对所有图像进行校正,包括格雷码图像(g1,g2,...,gn)、相移图像(p1,p2,...,pm)、投射全黑光和全白光对应的图像,分别记为b、w;步骤4、计算得到掩码图像:设定t为阈值,则掩码的表达式为m = (w
ꢀ‑ꢀ
b)≥t,即当(w-b)《 t时m为0,否则为1;步骤5、计算利用掩码图像与格雷码图像和相移图像进行逻辑与运算,得到格雷码周期k和主相位φ;步骤6、利用格雷码周期k和主相位φ和掩码图像计算得到绝对相位φ:,其中是像素坐标,表示第y行第x列;步骤7、按行对左绝对相位和右绝对相位进行匹配;所述左绝对相位由左相机下的格雷码周期、相位解包裹得到的主相位值和左掩码图像计算得到;
所述右绝对相位由右相机下的格雷码周期、相位解包裹得到的主相位值和右掩码图像计算得到;步骤8、利用匹配结果和相机内参计算空间坐标,最后生成点云。
7.所述全黑光是指不投光或者投射光强为0的光。
8.所述步骤5中,对于求解格雷码周期k,先分别进行g1,...,gn与m的逻辑与(&)运算,maskgi = gi & m,1《i《n,再按传统的格雷码转成十进制的方法执行格雷码与二进制、十进制的转换:maskgi
ꢀ‑
》 二进制码
ꢀ‑
》 十进制k;对于求解主相位φ,也是先分别进行p1,...,pm与m的逻辑与(&)运算,maskpi = pi & m,1《i《m,再按传统的计算方法计算得到主相位φ:maskpi
ꢀ‑
》 二进制码
ꢀ‑
》 十进制φ;对于小于零的十进制φ,加上2π。
9.采用上述方案后,本发明使用阈值法制作掩码,对于小于阈值的掩码都视为阴影区域,不小于阈值的则视为有效区域。这样在格雷码解码和相移解包裹时可以跳过无效区域计算,降低计算量,从而提高三维重建速度。同时,使用阈值法制作掩码,并对小于零的主相位值作增加的处理,达到减少三维重建中左、右绝对相位的错误匹配,提高三维重建的精度。
附图说明
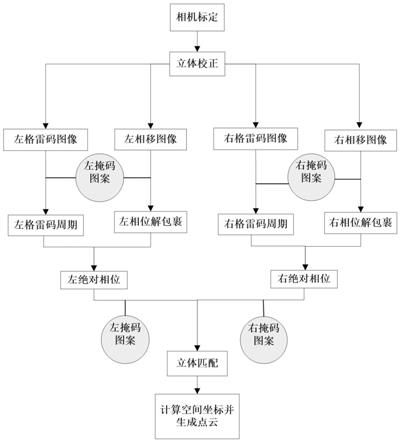
10.图1为双目结构光设备结构图;图2为本发明的结构光解码示意图;图3为本发明的左右相位绝对匹配示意图;图4为本发明的方法流程图。
具体实施例
11.如图2-4所示,本发明揭示了一种基于掩码改进的双目结构光三维重建方法,其具体包括以下步骤:步骤1、进行相机标定得到相机初始参数,然后利用初始参数进行立体校正得到校正的相机参数。
12.步骤2、投射全黑光图像、全白光图像、格雷码图像和相移图像,并用左相机和右相机拍摄下图像。投影仪是不能投射全黑光的,所以本发明的全黑光实际上是不投光或者投射光强为0的光。分别对左相机拍摄的图像和右相机拍摄的图像进行步骤3-6的处理。
13.步骤3、使用校正的相机参数对所有图像进行校正,包括格雷码图像(g1,g2,...,gn)、相移图像(p1,p2,...,pm)、投射全黑光和全白光对应的图像(分别记为b,w)。
14.步骤4、计算得到掩码图像:设定t为阈值,则掩码的表达式为m = (w
ꢀ‑ꢀ
b)≥t,这是计算机编程表达式,即当(w-b)《 t时m为false或者为0,否则为true或者1。即全白光对应的图像与全黑光对应的图像对应位置进行像素作差运算得到掩码图像,掩码图像中所有小于阈值t的区域的都认为是阴影区域,不小于阈值t的认为是有效区域。
15.步骤5、计算利用掩码图像与格雷码图像和相移图像进行逻辑与运算,达到保留有效区域、剔除阴影区域的目的,从而得到格雷码周期k和主相位φ;
对于求解格雷码周期,先分别进行g1,...,gn与m的逻辑与(&)运算,maskgi = gi & m,1《i《n,再按传统的格雷码转成十进制的方法执行格雷码与二进制、十进制的转换:maskgi
ꢀ‑
》 二进制码
ꢀ‑
》 十进制k;同理,对于求解主相位,也是先分别进行p1,...,pm与m的逻辑与(&)运算,maskpi = pi & m,1《i《m,再按传统的计算方法计算得到主相位φ:maskpi
ꢀ‑
》 二进制码
ꢀ‑
》 十进制φ;对于小于零的十进制φ,加上2π。此处,对小于零的主相位值作增加的处理,达到减少三维重建中左、右绝对相位的错误匹配,提高三维重建的精度。
16.步骤6、利用格雷码周期k和主相位φ和掩码图像计算得到绝对相位φ:,其中是像素坐标,表示第y行第x列。
17.步骤7、按行对左绝对相位和右绝对相位进行匹配:假设图像大小为h*w,即有h行,w列,由于图像经过立体校正,左右图像严格行对齐即左图的第i行只可能与右图的第i行匹配,所以可以从第1行到第h行按行进行匹配,每行数据量为1*w。匹配方法采用现有匹配方法即可。
18.上述左绝对相位由左相机下的格雷码周期、相位解包裹得到的主相位值和左掩码图像计算得到;上述右绝对相位由右相机下的格雷码周期、相位解包裹得到的主相位值和右掩码图像计算得到。
19.步骤8、利用匹配结果和相机内参计算空间坐标,最后生成点云。
20.综上,本发明使用阈值法制作掩码,对于小于阈值的掩码都视为阴影区域,不小于阈值的则视为有效区域。这样在格雷码解码和相移解包裹时可以跳过无效区域计算,降低计算量,从而提高三维重建速度。同时,使用阈值法制作掩码,并对小于零的主相位值作增加的处理,达到减少三维重建中左、右绝对相位的错误匹配,提高三维重建的精度。
21.以上所述,仅是本发明实施例而已,并非对本发明的技术范围作任何限制,故凡是依据本发明的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1