一种基于改进型野马算法的水平圆柱体设施布局方法
1.本发明属于设施布局领域,尤其涉及一种基于改进型野马算法的水平圆柱体设施布局方法。
背景技术:
2.flp(facility layout problem),也称为二次分配问题(qap),是指在规定的空间内,按照特定的要求放置一定数量的设施的问题。设施布局几乎应用于人类社会的方方面面。在生活中,变分自编码器、动态卷积网络等被广泛用于室内场景生成和室内家具布置。在工业上,合理的设施布局可以降低物料搬运成本,从而提高生产效率,降低企业运营成本。在某些场景下,如航天器和潜水器,在如此有限的空间内要按照不同的功能要求来布置数量众多的设备。对于人工设计而言,这需要大量的经验支持。随着设备数量和布局要求的增加,布局难度大幅度增加。随着计算机算力飞跃式增长和大量智能优化算法的出现,flp这样的np-hard问题有了新的解决方案。
3.在过去的几十年中,flp得到了广泛的研究。起初,大量的确定性算法,如二叉树算法,被用于解决这个问题,一般在设备数量较少时,如数量在15个以下,分支定界和切割平面已经成功应用到flp,但随着设备数量的增加,布局的难度呈指数级增加,使用确定性算法的时间成本将大大增加。启发式算法作为一种不确定性算法,具有全局搜索能力强、收敛速度快的特点。对于np-hard问题,它可以在多项式时间内获得较好的解。因此,大量的启发式算法被应用于flp。
4.一些经典的启发式算法例如遗传算法,粒子群算法运用于水平圆柱体flp的效果并不是很好,一方面是由于水平圆柱体几何结构特殊,待布置设施之间及待布置设施与其边界的干涉情况过于复杂,因此算法在优化过程中非常容易跳出布局边界,进而大大影响了优化速度和解的质量。另一方面,这些经典优化算法全局搜索能力相对较弱,我们的布置空间相对较大,因此非常容易陷入局部最优解,而由于算法策略等原因,跳出局部最优解的能力较弱,导致浪费大量算力。
5.如何在设施数目较多,布局要求多的情况下实现水平圆柱体内设施布局是个亟待解决的问题。
技术实现要素:
6.为了解决以上经典启发式算法处理水平圆柱体设施布局问题的不足,本发明提供一种基于改进型野马算法的水平圆柱体设施布局方法。
7.本发明的一种基于改进型野马算法的水平圆柱体设施布局方法,包括以下步骤:
8.步骤1:为了方便约束条件的数学表述,将待布物体抽象建模为圆柱体和方体,通过表述圆柱体与圆柱体的干涉公式、圆柱体和方体的干涉公式、方体和方体的干涉公式,进而得到重叠约束的数学表述。
9.s11:通过几何描述直接限制设施中心的生成范围,若因特殊情况导致布局空间不
封闭,则利用柱坐标变换,将搜索空间变换为封闭空间。
10.s12:将待布设施在三维空间中的干涉通过投影转变为两个二维平面的干涉问题,通过分别求解二维平面干涉量可以表示出总干涉量。
11.s13:只要待布设施中心都位于规定的区域内,那么设施与待布置区域边界之间干涉为0,因此我们只用考虑待布设施之间的干涉,因此重叠约束的数学表述为:
[0012][0013]
步骤2:为了实现带约束的多目标优化设施布局,对重力约束,邻近约束,对称约束进行数学表述。
[0014]
s21:考虑在实际工程中,整个水平圆柱体的稳定性,设施应重心低,因此重心约束数学表述如下:
[0015][0016]
s22:为了实现某种功能,一些设施需要集中在一片区域内,因此对设施之间的邻近约束进行表述:
[0017][0018]
两个公式分别表示无拓扑子系统下的邻近约束和有拓扑子系统下的邻近约束。
[0019]
s23:实现相应的功能需求,某些设备需要关于圆柱体中心对称,为了水平圆柱体的稳定性,对称设备沿着水平面对称,其对称约束表述如下:
[0020][0021]
其中,n2表示相互对称的设备数量对数,(xi,yi,zi)和(x
is
,y
is
,z
is
)沿着水平面对称。
[0022]
步骤3:为了处理带约束的多目标优化情况时,引入支配准则,支配准则表述如下:定义约束条件适应度值之和为conv,优化目标适应度值之和定义为func,即:
[0023]
如果conv1》conv2,则个体1支配个体2。
[0024]
如果conv1=conv2,当func1》func2时,则个体1支配个体2。
[0025]
如果conv1=conv2,当func1=func2时,两个个体之间没有支配关系。
[0026]
因此优化模型可表述为:
[0027][0028]
步骤4:根据步骤1和步骤2分别建立的待布设施和约束条件的数学模型,在步骤3支配准则指导下进行解的更新,利用改进型野马算法对布局问题进行优化。
[0029]
s41:初始化p组解,随机选择p*ps个解作为种马,剩下的解随机分配到不同的马群中。
[0030]
s42:不同马群的普通马,要么进行交配行为,产生的后代进入第三个不同的马群中;要么围绕种群内的公马进行放牧行为;新产生的解必须位于布局空间内,如果新解在布局空间以外,要进行边界修正。
[0031]
s43:为了提高算法的收敛速度,调整随机奔跑策略为有向跳跃策略,所有解都有概率进行跳跃。
[0032]
s44:根据水洞竞争机制、动态惯性权重策略和有向跳跃策略计算每个马群种马的候选解,之后按照支配准则选择最优解作为马群的种马,如果两个解之间不存在支配关系,依然选择对解进行更新,这样可以增加解的多样性。
[0033]
s45:在所有的种马解中根据支配准则选择最优解作为全局最优解。
[0034]
步骤5:在规定的迭代次数之内,重复步骤4中的s42到s45,最优解之间的更新也遵从支配准则。
[0035]
本发明的有益技术效果为:
[0036]
本发明对待布空间和待布设施进行几何化描述,从模型的角度求解布局问题。提出在布局空间不封闭的情况下,对布局空间进行坐标变换,保证搜索空间的封闭性,避免了优化过程中解跳出布局空间。并且对算法策略进行了调整,增强了优化过程中跳出局部最优解的能力,加快了算法的收敛速度。同时引入支配准则用来处理带约束的多目标情况下的设施布局问题。本发明可以在多项式时间内在不同数量设备及不同布局要求下实现水平圆柱体内设施布局。
附图说明
[0037]
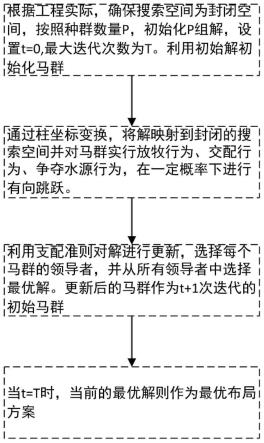
图1为本发明基于改进型野马算法的水平圆柱体设施布局方法流程图。
[0038]
图2为设施中心生成区域图。
[0039]
图3为圆柱体与圆柱体干涉分解图。
[0040]
图4为圆柱体和方体的干涉分解图。
[0041]
图5为方体和方体的干涉分解图。
[0042]
图6为初始化马群示意图。
[0043]
图7为有向跳跃策略流程图。
[0044]
图8为实际可布置区域图。
[0045]
图9为坐标变换后封闭的搜索空间示意图。
[0046]
图10为不同数量的设施仅满足重叠约束的布局图。
[0047]
图11为依次添加不同约束的设施布局图。
具体实施方式
[0048]
下面结合附图和具体实施方法对本发明做进一步详细说明。
[0049]
本发明的一种基于改进型野马算法的水平圆柱体设施布局方法流程图如图1所示,本发明对布局空间及待布设施进行几何表述,并对约束条件进行数学描述,以此建立基于模型的布局过程。引入有向跳跃策略加快优化收敛速度,在布局要求较多的情况下,使用
支配准则处理多布局要求下的带约束多目标优化问题,通过分级优化以提高解的质量。具体包括以下步骤:
[0050]
步骤1:为了方便约束条件的数学表述,将待布物体抽象建模为圆柱体和方体,通过表述圆柱体与圆柱体的干涉公式、圆柱体和方体的干涉公式、方体和方体的干涉公式。进而得到重叠约束的数学表达式。
[0051]
s11:布局空间为圆柱体,以圆柱体中心为原点,水平圆柱的轴向为x轴,纵截面法线方向为y轴,垂直方向为z轴。在设施布局过程中,设施应该始终处于布局空间内,一般情况下都会选择通过一个约束条件来达到此目的,为了减少约束条件,我们通过几何描述直接限制设施中心的生成范围。其生成区域如图2所示,其区域数学描述为:
[0052][0053]
a、b分别为设备在纵剖面投影矩阵的长和宽。
[0054]
若因特殊情况导致布局空间不封闭,则利用坐标变换,将搜索空间变换为封闭空间。我们的布局空间为水平圆柱体,考虑如下情况:存在一些设施在圆柱体内的位置固定,因此在我们布局过程中,这片区域属于不可布置区域,那么我们的实际可布置区域就可能如图8所示,相当于有个垂直的圆柱体将水平圆柱体贯穿,这种情况下我们的布置空间是不封闭,这大大降低了优化效率,因此我们通过柱坐标变换将其变换为如图9所示的封闭空间。柱坐标公式如下:
[0055][0056]
s12:将待布设施在三维空间中的干涉通过投影转变为两个二维平面的干涉问题,因此以上三种干涉情况表述如下:
[0057]
圆柱体和圆柱体的干涉情况如图3所示,公式为:
[0058][0059]
d1为垂直轴向维度的干涉,d2为轴向维度的干涉,d
3d
为总干涉量。r为圆柱体底面半径,(x,y,z)为圆柱体中心坐标,h为圆柱体的高。
[0060]
圆柱体和方体的干涉情况如图4所示,公式为:
[0061][0062]
a1表示方体沿圆柱体轴向的长度,b1表示圆柱体的高度,a2和b2表示方体中心和圆柱体中心在圆柱的轴向上的分量。
[0063]
方体和方体的干涉情况如图5所示,公式为:
[0064][0065]
lx,ly,lz表示方体的三边长度。
[0066]
s13:只要待布设施中心都位于规定的区域内,那么设施与待布置区域边界之间干涉为0,因此我们只用考虑待布设施之间的干涉,因此重叠约束的数学表述为:
[0067][0068]
步骤2:为了实现多布局要求下的设施布局,对重力约束,邻近约束,对称约束进行数学表述。
[0069]
s21:考虑在实际工程中,整个水平圆柱体的稳定性,设施应尽可能重心低,因此重力约束数学表述如下:
[0070][0071]
s22:为了实现某种功能,一些设施需要集中在一片区域内,因此有必要对设施之间的邻近约束进行表述:
[0072][0073]
两个公式分别表示无拓扑子系统下的邻近约束和有拓扑子系统下的邻近约束。
[0074]
s23:实现相应的功能需求,某些设备需要关于圆柱体中心对称,为了水平圆柱体的稳定性,对称设备沿着水平面对称。其对称约束表述如下:
[0075][0076]
其中n2表示相互对称的设备数量对数,(xi,yi,zi)和(x
is
,y
is
,z
is
)沿着水平面对称。
[0077]
在处理对称约束时,并不是在优化结束之后按照中心对称来放置另一个对称设备,而是在优化过程中对称设备的坐标同时参与优化,只是在计算适应度值时只计算一个设备,因为对称设备是沿着水平面中心对称的,除了坐标不同之外其他属性完全相同。通过
这样的策略,我们不仅可以避免设置罚函数来表述该约束条件,同时可以保证在满足对称约束的同时不会影响其他布局要求的优化。
[0078]
步骤3:野马算法本质上属于单目标优化算法,为了处理带约束的多目标优化布局问题,引入支配准则,结合工程实际,在水平圆柱体设施布局中一般存在以下约束:重叠约束,重力约束,对称约束,邻近约束。对于布局问题来说,设施之间及设施与舱室之间不重叠是最基本的要求,属于硬约束,对称约束也属于硬约束。重力约束,邻近约束出于实现某种功能则属于软约束。因此我们将硬约束作为约束条件,软约束作为目标函数。支配准则表述如下:我们定义硬约束的适应度值之和为conv,软约束的适应度值之和定义为func。即:
[0079]
如果conv1》conv2,则个体1支配个体2。
[0080]
如果conv1=conv2,当func1》func2时,则个体1支配个体2。
[0081]
如果conv1=conv2,func1=func2时,两个个体之间没有支配关系。
[0082]
单目标优化算法处理带约束多目标优化问题时常用加权法,但是加权法存在解分布不均,非凸pareto前沿难以求解,加权系数难以合理构造的问题,因此容易造成算力的浪费,引入支配准则,在一定程度上形成了优化的分级,先满足约束条件,再优化目标函数,有效提高了解的质量。因此我们优化模型可以表述为:
[0083][0084]
步骤4:根据步骤1和步骤2分别建立的待布设施和约束条件的的数学模型,在步骤3支配准则引导解的更新下,利用改进型野马算法对布局进行优化。如果对布局空间进行了坐标转换才得到了封闭的搜索空间,在解的搜索过程中,通过柱坐标变换将解映射到柱坐标系下进行搜索,在计算适应度值时,再利用反变换映射在笛卡尔坐标系下进行计算。反变换公式为:
[0085][0086]
s41:初始化p个解,随机选择p*ps个解作为种马,剩下的解随机分配到不同的马群中,如图6所示。
[0087]
s42:不同马群的普通马,要么进行交配行为,产生的后代进入第三个不同的马群中;要么围绕种群内的公马进行放牧行为。值得注意的是新产生的解必须位于布局空间内,如果新解在布局空间以外,要进行边界修正。
[0088]
s43:为了提高算法的收敛速度,我们调整随机奔跑策略为有向跳跃策略,有向跳跃策略如图7所示。
[0089]
由于我们的布局空间不规则且边界复杂,布局空间较大,因此过于随机的初始化,新产生的解极大概率会变得更差,这极大减缓了优化的收敛速度。于是我们调整策略,给定初始化以特定方向,保证新解的适应度值不低于当前解,从而保证优化过程不会被打断。
[0090]
s44:根据水洞竞争机制、动态惯性权重策略和有向跳跃策略计算每个马群种马的
候选解,之后按照支配准则选择最具优势的马作为马群的种马。如果两个解之间不存在支配关系,我们依然选择对解进行更新,这样可以增加解的多样性。
[0091]
s45:在所有的种马解中根据支配准则选择最优解作为全局最优解。
[0092]
步骤5:在规定的迭代次数之内,重复步骤四中的s42到s45。最优解之间的更新也遵从支配准则。
[0093]
本发明的一种基于改进型野马算法的水平圆柱体设施布局方法,基于模型从几何角度处理布局问题。通过调整随机奔跑策略为有向跳跃策略,有效解决了优化容易陷入局部最优解及算法收敛速度迟缓的问题,同时引入支配准则,有效解决了水平圆柱体内带约束的多目标优化设施布局问题。在不同数量设施下进行布局优化,如图10所示,可以看出在满足重叠约束最多58个设备情况下,我们的布局是完全满足布局要求的。在设备数量为30个时,在满足重叠约束下,依次添加重力约束,邻近约束,对称约束,如图11所示,可以看出我们的发明能够在设施数目较多,布局要求多的情况下有效解决水平圆柱体内设施布局问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1