一种基于多维环境因子定量估算湖泊渔业资源量的方法
1.本发明属于资源环境遥感领域,特别涉及一种基于多维环境因子定量估算湖泊渔业资源量的方法。
背景技术:
2.渔业资源作为自然资源的重要组成部分,可为人类提供直接的可食用蛋白质,因此渔业资源的可持续利用关乎民生及粮农安全问题。湖泊作为淡水渔业资源的重要供应地,模拟湖泊环境变化对渔业资源量的影响对维系湖泊资源环境服务功能与生态系统稳定具有重要的现实意义。
3.目前,国内外学者或者利益相关人员在调查湖泊渔业资源量时采用的方法侧重单点案例为基础的人工调查为主。例如,采用昂贵的水声学探测技术或鱼类标记技术来进行渔业资源及生境评估,需要付出大量的物资、人力、时间等成本,并且无法反映全湖区的总体状况和时空差异性特征,这在一定程度上限制了其在大区域尺度的推广。随着遥感技术的快速发展,湖泊鱼类生境及渔业资源特征的调查手段、评估理论与方法取得了跨越式及多元化的进步。已有国外研究表明遥感技术被广泛应用于湖泊渔业资源评估与分析、空间分布、鱼类栖息地评价、鱼情监测预报等。国内的研究更多集中在利用遥感技术监测湖泊围网养殖情况。虽然遥感技术在鱼类典型生境及渔业资源领域的发展优势,可以更加快速有效地获取密集时间尺度及广阔空间分布的渔业资源动态特征,但是在反映直接影响渔业资源量的生境特征方面(产卵、索饵、洄游、栖息等)还存在巨大的应用潜力。
4.综上,湖泊环境信息是影响湖泊渔业资源的关键信息。现有的调查研究方法无法在全湖区开展测量,在保护渔业资源以促进可持续发展的背景下,提出一种基于多维环境因子定量估算湖泊渔业资源量的方法,对湖泊渔业资源的管理与保护及鱼类种群多样性维持具有重要的应用意义。
技术实现要素:
5.本发明的目的在于突破传统渔业水域生境及渔业资源调查手段的瓶颈技术,提出了一种基于多维环境因子(水文、水质、水生态)定量估算湖泊渔业资源量的方法。该方法集成遥感监测与机器学习智能算法模拟技术实现了多维湖泊水环境信息对渔业资源量影响的定量模拟。
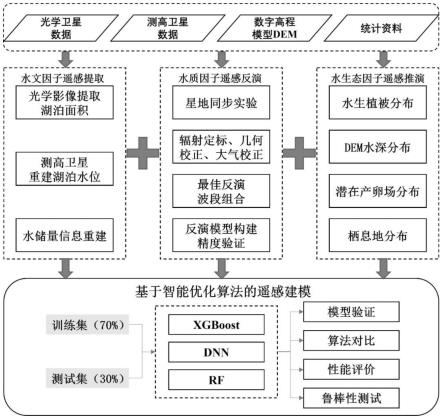
6.为实现上述技术目的,本发明采用如下技术方案:基于多维环境因子定量估算湖泊渔业资源量的方法,包括:利用卫星数据、少量野外实测光谱数据及gps定位测绘数据获取湖泊环境的水文因子、水质因子和水生态因子数据;其中,所述水文因子数据为湖泊水域面积时间序列、水位时间序列、水量变化时间序列,所述水质因子为叶绿素a浓度、透明度、悬浮物浓度,所述水生态因子为鱼类潜在产卵场和栖息地的空间分布;基于机器学习智能算法,以所述水文因子、水质因子和水生态因子数据中的一个
或多个的不同排列组合作为输入,模拟不同维度湖泊环境因子组合情境下估算的渔业资源量与渔业资源量实测数据的相关性,筛选出影响渔业资源量的典型湖泊环境因子组合方式;利用筛选的不同维度典型湖泊环境因子组合方式构建遥感模型进而估算渔业资源量。
7.作为本发明的进一步改进,分别基于卫星遥感影像及激光雷达测高卫星数据,提取湖泊的水域面积时间序列及水位时间序列;基于landsat oli、sentinel-2 msi卫星遥感影像所述少量野外实测光谱数据反演获取叶绿素a浓度、透明度、悬浮物浓度;利用预处理后的landsat系列卫星影像计算ndvi指数,结合水域数字高程模型dem数据和所述水域面积时间序列提取鱼类潜在产卵场和栖息地的空间分布。
8.作为本发明的进一步改进,利用筛选出的典型湖泊环境因子组合方式结合不同机器学习智能算法构建遥感模型,以模型性能最优为目标筛选遥感模型;基于模拟迭代次数的鲁棒性测试,确定模型的最佳迭代次数。
9.作为本发明的进一步改进,采用多指标联合分析的方法,获取该模型方法的精度,以模型性能最优为目标筛选遥感模型;采用的指标包括相关系数、均方根误差、绝对误差、纳什系数。
10.作为本发明的进一步改进,基于landsat系列/sentinel-2遥感影像分别计算ndwi水体指数,采用edge otsu边缘大津阈值分割算法自动获取基于两种遥感数据获取的水域面积时间序列,然后将两种遥感数据获取的水域面积结果融合成连续的面积时间序列。
11.作为本发明的进一步改进,所述采用edge otsu边缘大津阈值分割算法自动获取水域面积时间序列的方式为:将计算ndwi后的遥感影像的灰度范围设置为[0,t],以固定步长1依次递增阈值,当类间方差达到最大时获得最佳阈值作为大津阈值。
[0012]
作为本发明的进一步改进,基于ndwi确定的水陆边界范围向外一个像素的长度设置缓冲区。以缓冲区边缘内的ndwi值构建直方图,作为edge otsu的算法输入,从代表水和非水的双峰/单峰区域采样直方图中自动确定分割阈值,该分割阈值可使类间方差达到最大,利用该分割阈值可以将影像分为水和非水的二值化影像。
[0013]
作为本发明的进一步改进,所述水位时间序列通过融合水文站点和激光雷达测高卫星获取的水位值重建;所述水量变化时间序列根据通过面积-水位构建的库容曲线估算。
[0014]
作为本发明的进一步改进,所述水质因子的获取方式为:采集待测水质因子的实测浓度数据及利用卫星遥感获取的遥感光学特性信息;结合landsat-8 oli和sentinel-2 msi的波段响应函数将高光谱反射率转变为波段反射率,与实测光谱进行光谱重构方程优化,重构出反演湖泊水质的敏感波段;结合所述敏感波段和实测浓度数据构建水质因子反演模型;建立landsat-8 oli和sentinel-2 msi反演水质因子结果的转换系数,统一误差尺度及空间分辨率,进而构建oli-msi虚拟星座获取湖泊水质因子的时空变化序列。相比现有的半分析反演模型和经验模型,本发明的反演方法优势在于重构出最优反演波段进而构
建反演模型,而不是利用光谱与现有波段关系进行拟合或者波段组合的方式,这种改进可以弥补高分辨率遥感数据(例如,landsat-8 oli和sentinel-2 msi数据)缺少反演水质因子的可用波段的情况,进而提升反演结果的空间分辨率。
[0015]
作为本发明的进一步改进,考虑到鱼类产卵、栖息会选择具有一定水深并伴有水生植被分布的区域,潜在产卵场、栖息地的分布可通过dem与ndvi空间数据的叠加区域获取。
[0016]
作为本发明的进一步改进,针对不同鱼类的产卵、栖息时间上的差异,选择不同鱼类产卵、栖息对应时间的水域范围掩膜裁切具有一定深度(dem阈值)及水生植被分布(ndvi阈值)的区域,即可获取不同鱼种的潜在产卵场、栖息地的空间分布。
[0017]
作为本发明的进一步改进,所述少量野外实测光谱数据包括叶绿素a、悬浮物的辐照度信息,可以增加水质因子的遥感反演精度。
[0018]
作为本发明的进一步改进,所述gps定位测绘数据包括水生植被分布和水域范围最大边界定位信息,可以增加水文因子和水生态因子的遥感反演精度。
[0019]
作为本发明的进一步改进,迭代次数测试优选≥1000次的模拟结果平均值作为最终估算结果。
[0020]
本发明具有以下优势:(1)本发明提出的基于多维环境因子定量估算湖泊渔业资源量的方法,不依赖于大量的野外实测数据,主要基于公开可获取的遥感数据即可完成;(2)本发明算法实施简单,可快速进行模型构建;(3)本发明可应用于全湖区的空间特征模拟,且无需考虑湖泊本身的形态及地貌特征,并可向其他区域性湖泊进行推广。
附图说明
[0021]
图1是本发明实例提供的样区图。
[0022]
图2是本发明的模型构建流程图。
[0023]
图3是本发明实例中湖泊水域范围时间序列遥感重建月均结果。
[0024]
图4是本发明实例中湖泊水质因子遥感反演结果。
[0025]
图5是本发明实例中鱼类潜在产卵场分布遥感反演结果。
[0026]
图6是本发明实例中不同环境因子组合情景下的模拟结果。
[0027]
图7是本发明实例中的模型精度验证结果。
[0028]
图8是本发明实例中模型鲁棒性测试结果。
具体实施方式
[0029]
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
[0030]
本技术的实施例以鄱阳湖为研究区。鄱阳湖是我国第一大淡水湖,且与长江干流相通。由于江、湖之间物质和能量的频繁交换,鄱阳湖的淡水渔业资源十分丰富,作为本发明的实施例具有一定的代表性。
[0031]
如图2所示,是实施例的流程图,本实施例包括以下步骤:
步骤一、遥感提取实施例湖泊的水文因子。首先采用landsat系列/sentinel-2遥感影像数据计算ndwi水体指数并利用gps辅助测绘的最大水体边界信息约束最大水域范围,进而通过edge otsu边缘大津阈值分割算法提取鄱阳湖逐月水域范围(图3);然后融合水文站点和激光雷达测高卫星获取的水位值重建鄱阳湖水位时间序列;最后参考面积-水位构建的库容曲线估算鄱阳湖的水量变化时间序列。
[0032]
步骤二、遥感反演实施例湖泊的水质因子。这一步骤的目的在于借助湖泊环境的光谱特征信息和水质参数浓度之间的关系,反演全湖区的水质情况。
[0033]
水质因子反演使用landsat-8 oli、sentinel-2 msi遥感影像数据。
[0034]
(1)以实施例湖泊为试验区,通过野外巡测和星地同步实验收集遥感光学特性信息及样区的叶绿素a浓度、透明度、悬浮物浓度信息。
[0035]
(2)结合oli和msi的波段响应函数将高光谱反射率变为波段反射率,与实测光谱进行光谱重构方程优化,重构出反演湖泊水质的敏感波段。
[0036]
(3)针对oli和msi重构的光谱波段,利用实测水质参数浓度,修订湖泊水质的反演模型。
[0037]
(4)建立oli和msi反演水质因子结果的转换系数,统一误差尺度及空间分辨率,进而构建oli-msi虚拟星座获取湖泊水质因子的时空变化序列。相比现有水质因子遥感反演技术,本实施方案提升了反演结果的时空分辨率。(图4)。
[0038]
步骤三、遥感推演实施例湖泊的水生态因子。鄱阳湖的主导鱼种为鲤鱼和鲫鱼,其产卵场分布在沿水草洲和水深不超过0.5米的浅水区,而栖息地一般分布在2-4米(鲤鱼),3-4米(鲫鱼)的深度范围。
[0039]
首先利用landsat 8系列遥感影像计算ndvi,通过gps定位实测的水生植被分布区域确定ndvi阈值,提取ndvi阈值范围内的区域,即为水生植被分布区;其次,选择3-8月(产卵繁殖季)对应的水域范围作为掩膜裁切水生植被分布区和dem在0.5以下的区域,并叠加裁切后的两个区域作为鲤鱼和鲫鱼的潜在产卵场分布。此外,鲫鱼和鲤鱼的潜在栖息地分布区则采用不同深度阈值的dem数据叠加非繁殖月份9月-次年2月所对应的水域范围进行提取。与现有技术相比,本方案针对不同鱼类不同生境特征类型独立进行生态因子提取,提高了生态因子的提取精度和多样性。(图5)。
[0040]
步骤四、采用多种机器学习智能算法(极限梯度提升树xgboost、深度神经网络dnn、随机森林rf),构建基于遥感监测多维湖泊环境因子估算渔业资源量的模型。在构建的模型中设置不同湖泊环境因子的组合情景进行渔业资源量的模拟实验(图6),包括湖泊环境水文因子模拟情景、湖泊环境水质因子模拟情景、湖泊环境水生态因子模拟情景、湖泊环境水文因子叠加水质因子模拟情景、湖泊环境水文因子叠加水生态因子模拟情景、湖泊环境水质因子叠加水生态因子模拟情景、湖泊环境水文因子叠加水质和水生态因子模拟情景等,进而模拟出不同维度湖泊环境因子对渔业资源量的影响,确定水文因子叠加水质和水生态因子三维组合的模拟情景为最优组合方式。
[0041]
步骤五、选择最优机器学习智能算法(图7)。选取r、rmse、mae、nse四个模拟精度验证指标,对比xgboost、dnn、rf三种机器学习智能算法参与建模的模拟性能并与实测值进行精度验证,根据精度验证结果(图7b),本实施例优选出的基于xgboost机器学习智能算法构建模型的总体精度高达97%,已经满足本发明的建模条件(准确率》90%)。最终确定xgboost
机器学习智能算法为本实施例中遥感建模的最佳算法。
[0042]
步骤六、模型的鲁棒性测试。针对xgboost机器学习智能算法构建的遥感模型,通过不同最大迭代次数测试,找到模型结果稳健时期的最大迭代次数,在本实施例中优选1000次迭代以后的稳健模拟结果平均值作为最终估算结果(图8)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1