一种基于深度学习的无人机救援方法及系统
【】本发明涉及无人机,尤其涉及一种基于深度学习的无人机救援方法及系统。
背景技术
0、
背景技术:
1、自助自主的旅行受到了广大的旅行爱好者的追捧。由于旅行爱好者具有自主自发性,且大多数并没有经过专业的训练,因此在探险中追求刺激的同时也伴随着巨大的风险,失联现象屡有发生。
2、在对野外失联人员搜救的过程中,往往由于搜寻面积广、环境恶劣、交通不便给救援工作带来极大的不便,而且地毯性搜索效率低耗时久成本高。因此,往往由于救援的不及时,错过了最佳救援时间。
技术实现思路
0、
技术实现要素:
1、有鉴于此,本发明实施例提供了一种基于深度学习的无人机救援方法及系统。
2、第一方面,本发明实施例提供了一种基于深度学习的无人机救援方法,所述方法包括:
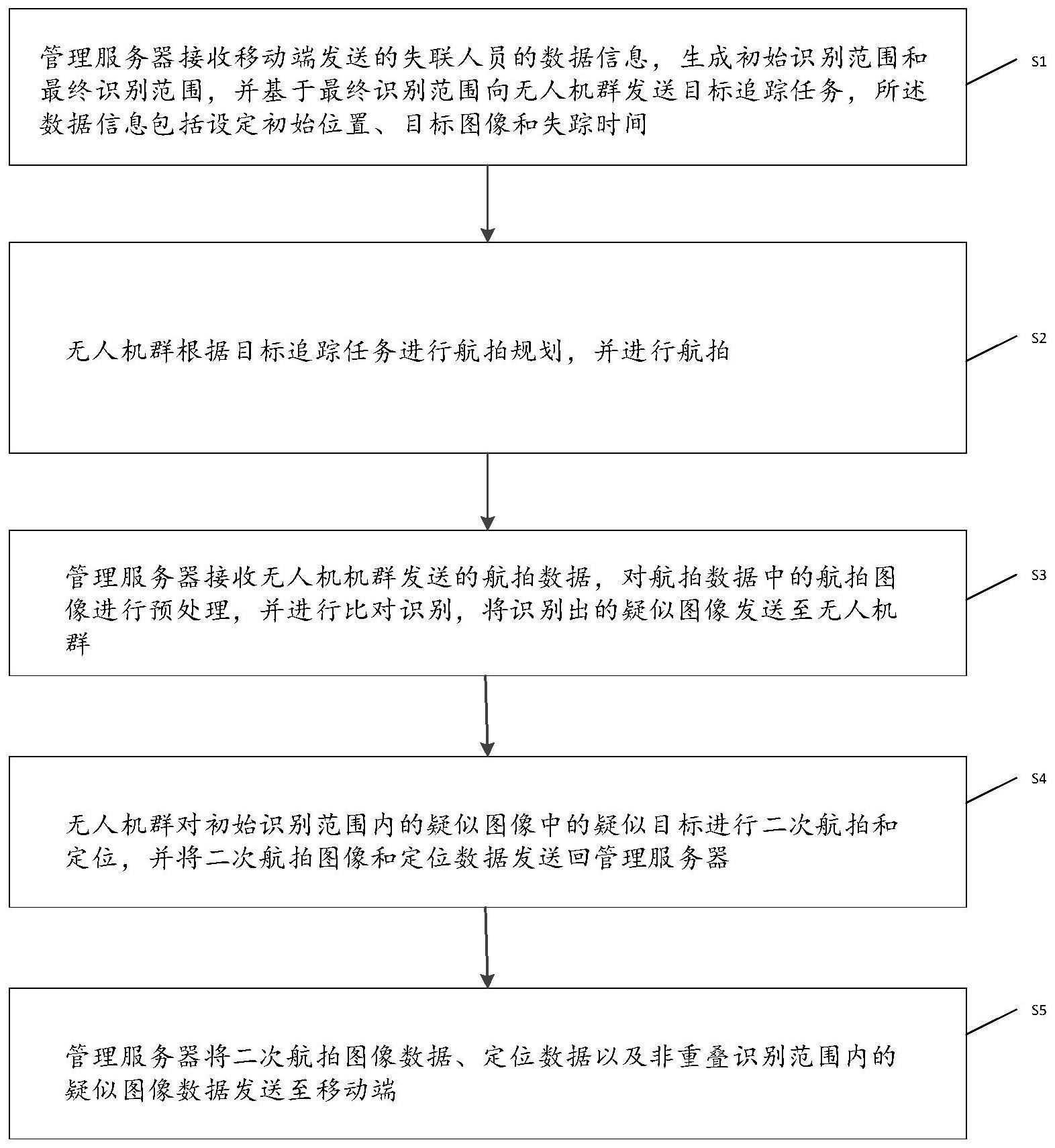
3、s1、管理服务器接收移动端发送的失联人员的数据信息,生成初始识别范围和最终识别范围,并基于最终识别范围向无人机群发送目标追踪任务,所述数据信息包括设定初始位置、目标图像和失踪时间;
4、s2、无人机群根据目标追踪任务进行航拍规划,并进行航拍;
5、s3、管理服务器接收无人机机群发送的航拍数据,对航拍数据中的航拍图像进行预处理,并进行比对识别,将识别出的疑似图像发送至无人机群;
6、s4、无人机群对初始识别范围内的疑似图像中的疑似目标进行二次航拍和定位,并将二次航拍图像和定位数据发送回管理服务器;
7、s5、管理服务器将二次航拍图像数据、定位数据以及非重叠识别范围内的疑似图像数据发送至移动端。
8、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述数据信息还包括失联地的历史失联人员数据信息以及目标失联人员的年龄、身体、心理和物资状况信息。
9、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述 s1中生成初始识别范围和最终识别范围,具体包括:
10、计算失联人员的第一活动距离l1,所述第一活动距离l1通过公式计算,其中,i为时间间隔单位,n为失联人员失联总时间,λ为调节系数,为测定的每i个时间单位内不同人员平地行走的平均距离;
11、计算失联人员的第二活动距离l2,所述第二活动距离l2通过公式计算,其中,失联地的历史失联人员发现位置与初始位置的平均距离,i为失联地的历史失联人员的序号,m为失联地的历史失联人员的数量,e为自然常数,α、β、γ、δ为修正参数,f1为失联人员年龄状况,若为老年、孕妇和儿童则f1为1,否则为0,f2为失联人员身体状况,若非健康则f2为1,否则为0,f3为失联人员心理状况,若非健康则f3为1,否则为0,f4为失联人员物资状况,若为紧缺则f4为1,否则为0;
12、比较第一活动距离l1与第二活动距离l2大小,以较小者作为第一目标活动距离l3,以较大者作为第二目标活动距离l4;
13、以设定初始位置为圆心,以第一目标活动距离l3为半径,在二维平面向外辐射生成初始识别范围,以第二目标活动距离l4为半径,在二维平面向外辐射生成最终识别范围。
14、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述 s2具体包括:
15、无人机群基于约束条件离开基地并达到初始识别范围内;
16、通过如下函数确定无人机群的初步识别范围:其中,vi(t)为第i架无人机在t时刻的速度,kc为速度调节系数,ωi为第i架无人机识别范围,h为惩戒函数,c为期望识别范围值,g(z0,q)为识别能力函数, c0为识别常数,q为无人机识别范围ωi内的点,γi(q,t)为t时刻q点的识别值;
17、无人机群进行位置调整,并上传无人机群网络:
18、定义分散函数其中,为无人机i与相邻无人机j在时间k的分散值,为是无人机i在时间k的位置,为是无人机j在时间k的位置,μ=n*π*cr2/a,n为无人机的总数量,cr为无人机的航拍范围,即识别范围,a为最终识别范围面积,为无人机i在时间k的关系区域密度值,μ为预期密度值, s={s1,s2,...,sn},m为关系区域中无人机总数量,为无人机间距,
19、其中,其中,为无人机i与其相邻无人机之间的分散总值,
20、定义无人机相邻无人机的集合其中,无人机的分散总值大于集合其他无人机;
21、关系区域分散值为无人机i被选为目标无人机以移动到时间k的次数,
22、定义关系区域密度值
23、定义关系区域合格函数其中,α为调节常数,n为无人机的总数量,每个关系区域中合格数值最高的无人机作为目标无人机;
24、无人机群进行位置更新,直至所有无人机关系区域的无人机关系区域密度值收敛至满足预设的要求,完成最终识别范围的航拍覆盖;
25、无人机群达到初始识别范围直至航拍覆盖,按预设的频率进行航拍。
26、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述约束条件根据目标追踪任务进行设定,所述约束条件包括无人机群的无人机数目、无人机的飞行速度、无人机的位置坐标、无人机的最大偏转角、无人机的最大偏转角变化量、无人机的识别范围以及初始识别范围参数。
27、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述 s3中对航拍数据中的航拍图像进行预处理,具体包括:
28、对航拍图像进行去噪和外观特征的提取;
29、将提取的外观特征输入预训练的一级svm分类器,根据置信度判断是否存在求救标志,若存在,则将对应的航拍图像标记为疑似图像;
30、将提取的外观特征输入预训练的二级svm分类器,根据置信度判断是否存在目标图像对应的颜色目标,若存在,则判断存在颜色目标的航拍图像数量是否大于数量阈值,若小于数量阈值,则将相应的航拍图像标记为疑似图像。
31、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述 s3中进行比对识别,具体包括:
32、通过关键点检测算法模型对航拍图像进行识别,判断航拍图像是否存在人形目标;
33、若存在人形目标,则计算航拍图像中的人形关键点,获取人形关键点的最大外接矩形,获取所有人形关键点的整体最大外接矩形,并将该整体最大外接矩形截取作为人形图像;
34、依次选取一人形图像与预处理后的目标图像的对应人形关键点的最大外接矩形进行图像进行比较,计算相似值sij,其中,相似值sij通过公式计算,其中,n*为人形图像的人形关键点数量,m*为人形关键点的最大外接矩形的统计灰度直方图中的灰度值的取值区间划分出的段数,qij为人形图像第i个人形关键点在灰度值的第j段取值区间内像素点的数量,fij为目标图像第i个人形关键点在灰度值的第j段取值区间内像素点的数量;
35、判断航拍图像的相似值sij是否大于设定的相似值阈值,若大于,则将航拍图像标记为疑似图像。
36、第二方面,本发明实施例提供了一种基于深度学习的无人机救援系统,所述系统包括:
37、移动端,用于发送的失联人员的数据信息,所述数据信息包括设定初始位置、目标图像和失踪时间;
38、无人机群,用于根据目标追踪任务进行航拍规划,并进行航拍;还用于对初始识别范围内的疑似图像中的疑似目标进行二次航拍和定位,并将二次航拍图像和定位数据发送回管理服务器;
39、管理服务器,包括任务生成模块、图像预处理模块、目标识别模块和传输模块,
40、所述任务生成模块,用于生成初始识别范围和最终识别范围,并基于最终识别范围向无人机群发送目标追踪任务;
41、所述图像预处理模块,用于接收无人机机群发送的航拍数据,对航拍数据中的航拍图像进行预处理;
42、所述目标识别模块,用于通过识别模型与目标图像进行比对识别,将识别出的疑似图像发送至无人机群;
43、所述传输模块,用于接收移动端发送的失联人员的数据信息,接收无人机群发送的二次航拍图像和定位数据,还用于将二次航拍图像数据、定位数据以及非重叠识别范围内的疑似图像数据发送至移动端。
44、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述任务生成模块用于生成初始识别范围和最终识别范围,具体包括:
45、计算失联人员的第一活动距离l1,所述第一活动距离l1通过公式计算,其中,i为时间间隔单位,n为失联人员失联总时间,λ为调节系数,为测定的每i个时间单位内不同人员平地行走的平均距离;
46、计算失联人员的第二活动距离l2,所述第二活动距离l2通过公式计算,其中,失联地的历史失联人员发现位置与初始位置的平均距离,i为失联地的历史失联人员的序号,m为失联地的历史失联人员的数量,e为自然常数,α、β、γ、δ为修正参数,f1为失联人员年龄状况,若为老年、孕妇和儿童则f1为1,否则为0,f2为失联人员身体状况,若非健康则f2为1,否则为0,f3为失联人员心理状况,若非健康则f3为1,否则为0,f4为失联人员物资状况,若为紧缺则f4为1,否则为0;
47、比较第一活动距离l1与第二活动距离l2大小,以较小者作为第一目标活动距离l3,以较大者作为第二目标活动距离l4;
48、以设定初始位置为圆心,以第一目标活动距离l3为半径,在二维平面向外辐射生成初始识别范围,以第二目标活动距离l4为半径,在二维平面向外辐射生成最终识别范围。
49、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述图像预处理模块用于对航拍数据中的航拍图像进行预处理,具体包括:
50、对航拍图像进行去噪和外观特征的提取;
51、将提取的外观特征输入预训练的一级svm分类器,根据置信度判断是否存在求救标志,若存在,则将对应的航拍图像标记为疑似图像;
52、将提取的外观特征输入预训练的二级svm分类器,根据置信度判断是否存在目标图像对应的颜色目标,若存在,则判断存在颜色目标的航拍图像数量是否大于数量阈值,若小于数量阈值,则将相应的航拍图像标记为疑似图像。
53、上述技术方案中的一个技术方案具有如下有益效果:
54、本发明实施例的方法中提出了一种基于深度学习的无人机救援方法及系统,管理服务器接收移动端发送的失联人员的数据信息,生成初始识别范围和最终识别范围,并基于最终识别范围向无人机群发送目标追踪任务;无人机群根据目标追踪任务进行航拍规划,并进行航拍;管理服务器接收无人机机群发送的航拍数据,对航拍数据中的航拍图像进行预处理,并进行比对识别,将识别出的疑似图像发送至无人机群;无人机群对初始识别范围内的疑似图像中的疑似目标进行二次航拍和定位,并将二次航拍图像和定位数据发送回管理服务器;管理服务器将二次航拍图像数据、定位数据以及非重叠识别范围内的疑似图像数据发送至移动端。本技术利用无人机对失联人员进行搜寻以设定初始位置评估生成失联人员的活动范围,然后通过无人机群的协调配合,完成对活动范围的航拍覆盖,再从航拍图像中通过识别模型和人工结合准确识别出目标,因此,搜寻失联人员准确高效便捷,避免了人工搜寻时存在的成本高耗时久效率低的问题,有利于提高失联人员的生存率。
- 还没有人留言评论。精彩留言会获得点赞!