交通道路多源目标信息数据的空间位置快速匹配方法与流程
1.本发明涉及多源数据融合处理技术,尤其涉及一种交通道路多源目标信息数据的空间位置快速匹配方法。
背景技术:
2.随着城市工业化进程的加快,道路上的机动车辆的数量逐渐增加,如果城市交通不能合理有效的管理,会导致很多严重的、日益突出的问题。当前,如何进行全天候、多场景、多目标、高精度地管控调度城市交通路口车辆,实现智慧交通管理,同样也是需要迫切解决的重点问题。为解决该问题,如今,不能仅仅依靠单一渠道数据(例如仅依靠基于相机视频机器视觉,或者仅依靠微波雷达,或者其他传感器的感知数据),而是需要多源渠道数据并用、甚至深度融合进行优势互补,形成了一种劣势互补和优势互融的新型多源数据融合感知设备。这样就可以进行全天候、多场景、多目标、高精度的数据采集和后期数据的深层处理。
3.现有技术中同一目标在雷达数据中的空间位置与视频图像数据中的空间位置处于两个不同的坐标系中,在进行匹配时,较为传统的方法是:将视频图像中的坐标进行参数调整到地理坐标系二维平面图,然后再将雷达坐标系也转换到地理坐标系二维平面图,最后在同一维度的平面上进行数据的位置匹配和深度融合。该做法在实际操作中,有其鲜明的局限性,由于在工程安装施工过程当中,不能保证不同点位的设备高度、俯仰角、水平偏移角、水平偏移距离等关键参数的一致性。而且后续的坐标系转换对这些参数的依赖性非常强,要同步保证每个参数的精准,才能实现理想效果。这就导致不同点位安装设备的调节参数较多,而且还不好把握尺度,操作过程重杂繁琐,非常难调,这就约束了其在工业应用的普适性。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种交通道路多源目标信息数据的空间位置快速匹配方法以解决雷达数据和视频图像数据空间位置匹配困难的问题。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种交通道路多源目标信息数据的空间位置快速匹配方法,该方法包括以下步骤:
7.步骤1、选取道路中与道路延伸方向平行的矩形区域为匹配范围,匹配范围内的目标为匹配目标p,匹配范围的四个顶点分别为a、b、c和d;在匹配范围内车流前行的方向上,d处于a的前方,b处于c的前方;
8.步骤2、在同一同时段内,于a的后方或d的前方利用雷达和拍摄方向与车流方向处于同一竖直面内的高清摄像机分别获取包含匹配范围的雷达数据及视频图像数据;
9.步骤3、以雷达安装位置为坐标原点建立雷达坐标系,获取a、b、c、d及目标时刻对
应的p在雷达坐标系中的位置信息,并分别为p(x,y)、a1(x1,y1)、b1(x2,y2)、c1(x3,y3)和d1(x4,y4),获取a和b之间的距离lab,a和d之间的距离lad;
10.步骤4、获取以下参数:
11.其中:dx=|x-x1|,dy=|y-y1|;
12.令gctrl为补偿控制参数,且1.5<gctrl<3.0;
13.步骤5、通过人工标定获取a、b、c和d在视频图像数据中像素坐标系内对应的点a2、b2、c2和d2,且像素坐标分别为a2(i1,j1)、b2(i2,j2)、c2(i3,j3)和d2(i4,j4);获取a2和b2之间、b2和c2之间、d2和c2之间、a2和d2之间的距离la2b2、lb2c2、ld2c2和la2d2;
14.步骤6、在目标时刻对应视频图像数据中像素坐标系内进行以下操作:
15.步骤6.1、连接点a2和b2形成线段a2b2,并在其内取一点m1,其像素坐标为m1(i5,j5),令a2和m1之间的距离为lm1a2,且lm1a2=la2b2*coffedx;
16.步骤6.2、连接点b2和c2形成线段b2c2,并在其内取一点m2,其像素坐标为m2(i6,j6),令b2和m2之间的距离为lm2b2,且lm2b2=lb2c2*coffedy_new;
17.步骤6.3、连接点d2和c2形成线段d2c2,并在其内取一点m3,其像素坐标为m3(i7,j7),令d2和m3之间的距离为lm3d2,且lm3d2=ld2c2*coffedy_new;
18.步骤6.4、连接点a2和d2形成线段a2d2,并在其内取一点m4,其像素坐标为m4(i8,j8),令a2和m4之间的距离为lm4a2,且lm4a2=la2d2*coffedy_new;
19.步骤6.5、连接点m1和m3形成线段m1m3,连接点m2和m4形成线段m2m4,令m1m3和m2m4交点处q为目标时刻p在目标时刻对应视频数据中像素坐标系内对应位置,q在像素坐标系中的位置信息为q(i,j)。
20.进一步,步骤6之后还包括步骤7输出目标时刻雷达数据中p对应的信息和目标时刻视频图像数据中q对应的信息。
21.相比现有技术,本发明的有益效果为:
22.与传统的雷达数据和视频图像数据融合方法相比,解决了传统融合方法严重依赖设备安装高度、俯仰角、水平偏移角、水平偏移距离等关键参数的问题,以及调节参数较多,操作繁琐,调节耗时耗力等不易操作问题,提高了多源数据快速融合的实用性;
23.本发明只需获取令高清摄像机的拍摄方向与道路车辆方向处于同一竖直面内便可,可极大简化操作流程,实现简单,施工方便,较大程度节省工程人员的调测时间和劳务成本;进行目标匹配时,本发明引入补偿控制参数,从而实现远近距离系数自适应调控,本发明在实现快速匹配的同时,又进一步提高了远近距离融合的准确性。
附图说明
24.图1为实施例中雷达坐标系中匹配区域的位置示意图;
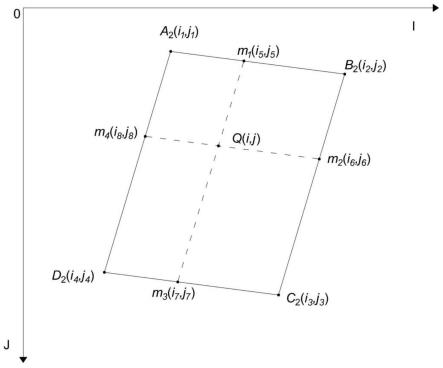
25.图2为实施例中像素坐标系中匹配区域的位置示意图。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
27.实施例
28.本实施例提供一种交通道路多源目标信息数据的空间位置快速匹配方法,该方法包括以下步骤:
29.步骤1、选取道路中与道路延伸方向平行的矩形区域为匹配范围(因道路抓拍多为抓取车道图像,同时矩形区域的设置一方面便于后继数据处理,另一方面便于与车道进行匹配,矩形区域可为一个车道的范围、多个车道的范围或跨车道的矩形范围),匹配范围内的目标为匹配目标p(匹配目标可为机动车、非机动车、行人等),匹配范围的四个顶点分别为a、b、c和d;在匹配范围内车流前行的方向上,d处于a的前方,b处于c的前方(此种设置仅为设定四个顶点的相对位置关系);
30.步骤2、在a的后方或d的前方利用雷达和拍摄方向与车流方向处于同一竖直面内的高清摄像机分别获取同一时间段内(即保证雷达和高清摄像机同一时间拍摄到同一匹配目标)包含匹配范围的雷达数据及视频图像数据(本实施例中设定的为在d的前方于道路上方架设雷达和高清摄像机,实际安装方向可根据需要进行设置,其中高清摄像机的安装需求为拍摄方向与车流方向处于同一竖直面内,即在固定高度的条件下,高清摄像机拍摄的内容在车流方向上因远近的不同对应方向上每个像素单元对应车辆方向上的真实距离不同,例如图2中la2d2上同样长度的线段靠近d2的对应真实距离小于远离d2对应的真实距离,其原因为受高清摄像机俯仰拍摄的影响;而在lc2d2上同样长度的线段靠近d2的线段对应真实距离基本等于远离d2的线段对应真实距离,其原因为水平面中高清摄像机在垂直于拍摄方向上所得拍摄内容受远近因素影响很小可以忽略,这也是后继不进行垂直于高清摄像机拍摄方向上调整的原因);
31.步骤3、以雷达安装位置为坐标原点建立雷达坐标系,获取a、b、c、d和目标时刻p在雷达坐标系中的位置信息,并分别为p(x,y)、a1(x1,y1)、b1(x2,y2)、c1(x3,y3)和d1(x4,y4),获取a和b之间的距离lab,a和d之间的距离lad,c和d之间的距离因矩形的原因等于lab,同样的,b和c之间的距离等于lad;如图1,雷达位置不变的情况下,四个顶点的位置信息是恒定的,即不随时间的变化而变化,其内匹配目标p的信息则是伴随时间而变化。
32.步骤4、获取以下参数:
33.其中:dx=|x-x1|,dy=|y-y1|;
34.令gctrl为补偿控制参数(即远近距离上的补偿设置,此参数的设置不根据时间变化而变化),且1.5<gctrl<3.0,本实施例中取2.2;
35.步骤5、通过人工标定获取a、b、c和d在视频图像数据中像素坐标系内对应的点a2、b2、c2和d2,且像素坐标分别为a2(i1,j1)、b2(i2,j2)、c2(i3,j3)和d2(i4,j4),获取a2和b2之间、b2和c2之间、d2和c2之间、a2和d2之间的距离的距离la2b2、lb2c2、ld2c2和la2d2;如图2,在选定
时间段内,高清摄像机位置不变的情况下,四个对应点的在所有视频图像数据中的位置信息也不会发生改变,为恒定的,即不随时间变化而变化,对应的距离也不会发生改变,仅匹配目标对应的点为伴随时间变化而变化;
36.步骤6、在目标时刻视频图像数据中像素坐标系内进行以下操作:
37.步骤6.1、连接点a2和b2形成线段a2b2,并在其内取一点m1,其像素坐标为m1(i5,j5),为变量,令a2和m1之间的距离为lm1a2,且lm1a2=la2b2*coffedx;此处la2b2对应高清摄像机水平面中与拍摄方向垂直的方向所得内容,此线段上不同位置同等长度对应真实距离在本发明中视为相同;
38.步骤6.2、连接点b2和c2形成线段b2c2,并在其内取一点m2,其像素坐标为m2(i6,j6),令b2和m2之间的距离为lm2b2,且lm2b2=lb2c2*coffedy_new;此处参考前述,lb2c2对应高清摄像机与拍摄方向相同的拍摄内容,此线段上不同位置同等长度对应真实距离受高清摄像机俯仰角远近的影响,因此借助补偿控制参数进行调整。
39.步骤6.3、连接点d2和c2形成线段d2c2,并在其内取一点m3,其像素坐标为m3(i7,j7),令d2和m3之间的距离为lm3d2,且lm3d2=ld2c2*coffedy_new;参考步骤6.1。
40.步骤6.4、连接点a2和d2形成线段a2d2,并在其内取一点m4,其像素坐标为m4(i8,j8),令a2和m4之间的距离为lm4a2,且lm4a2=la2d2*coffedy_new;参考步骤6.2。
41.步骤6.5、连接点m1和m3形成线段m1m3,连接点m2和m4形成线段m2m4,令m1m3和m2m4交点处q为目标时刻p在目标时刻视频数据中像素坐标系内对应位置,q在像素坐标系中的位置信息为q(i,j)。
42.即根据与高清摄像机拍摄方向的关系不同进行不同参数的配置,使得在目标时刻,能够将匹配目标于雷达数据中的位置根据设定转化关系直接转化为视频图像数据中的相应位置,可有效避免传统数据融合过程中还需分别转化至地理坐标系进行匹配的缺陷,可有效提高匹配效率。
43.其中,步骤6之后还包括步骤7输出目标时刻雷达数据中p对应的信息(位置、速度、角度等信息)和目标时刻雷视频图像数据中q对应的信息(颜色、车牌等信息)。
44.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1