车辆操作系统的调度方法、装置、设备、介质及车辆与流程
本技术属于车辆调度,尤其涉及一种车辆操作系统的调度方法、装置、设备、介质及车辆。
背景技术:
1、随着智能汽车的发展,搭载汽车操作系统的车辆也越来越多,汽车操作系统不但能够搭载应用程序,还可以通过应用程序管理和调度车辆的硬件/软件资源。
2、然而,现有技术中汽车操作系统的调度仅仅依赖操作系统本身的策略,而无法对车辆的状态进行感知,并根据车辆的状态调度车辆,很容易造成对车辆对异常情况响应不及时,酿成重大安全事故。
技术实现思路
1、本技术实施例提供了一种车辆操作系统的调度方法、装置、设备、介质及车辆,能够解决现有的车辆驾驶的安全性较低的问题。
2、第一方面,本技术实施例提供一种车辆操作系统的调度方法,方法包括:
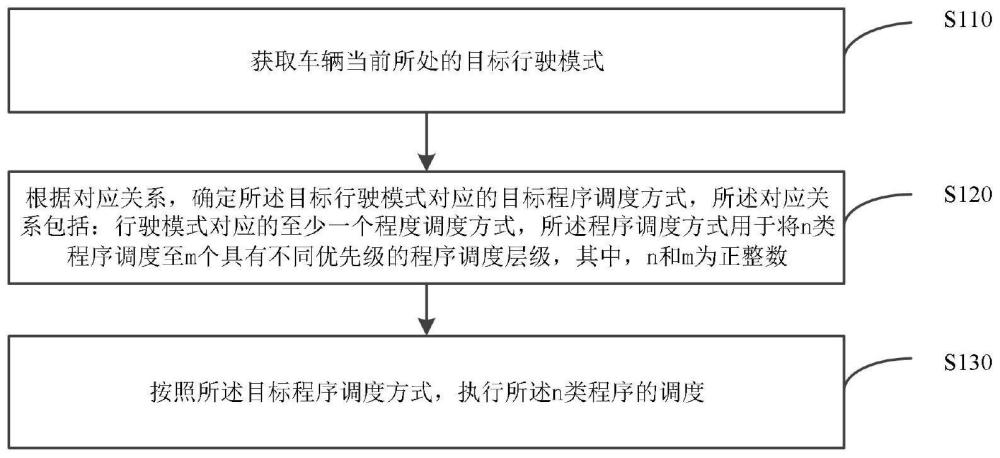
3、获取车辆当前所处的目标行驶模式;
4、根据对应关系,确定所述目标行驶模式对应的目标程序调度方式,所述对应关系包括:行驶模式对应的至少一个程度调度方式,所述程序调度方式用于将n类程序调度至m个具有不同优先级的程序调度层级,其中,n和m为正整数;
5、按照所述目标程序调度方式,执行所述n类程序的调度。
6、在一些实施例中,所述n类程序包括避险类程序、减速类程序、加速类程序和普通类程序,所述m个程序调度层级包括第一层级、第二层级、第三层级和第四层级,所述根据对应关系,确定所述目标行驶模式对应的目标程序调度方式之前,所述方法还包括:
7、设置所述对应关系;
8、所述对应关系包括:
9、加速模式,以及所述加速模式对应的所述n类程序的第一程序调度方式,所述第一程序调度方式为:将所述减速类程序放置于第四层级,将所述避险类程序放置于第三层级,将所述加速类程序和所述普通类程序放置于第二层级;
10、减速模式,以及所述减速模式对应的所述n类程序的第二程序调度方式,所述第二程序调度方式为:将所述加速类程序和所述避险类程序放置于第三层级,将所述减速类程序和所述普通类程序放置于第二层级;
11、左转模式和右转模式,以及所述左转模式和所述右转模式对应的所述n类程序的第三程序调度方式,所述第三程序调度方式为:将所述避险类程序放置于第四层级,将所述减速类程序放置于第三层级,将所述加速类程序和所述普通类程序放置于第二层级;
12、跌落模式,以及所述跌落模式对应的所述n类程序的第四程序调度方式,所述第四程序调度方式为:将所述避险类程序放置于第四层级,将所述减速类程序放置于第三层级,将所述加速类程序放置于第二层级,将所述普通类程序放置于第一层级;
13、侧倾模式,以及所述侧倾模式对应的所述n类程序的第五程序调度方式,所述第五程序调度方式为:将所述避险类程序放置于第四层级,将所述减速类程序放置于第三层级,将所述加速类程序放置于第二层级,将所述普通类程序放置于第一层级;
14、颠簸模式,以及所述颠簸模式对应的所述n类程序的第六程序调度方式,所述第六程序调度方式为:将所述避险类程序放置于第四层级,将所述减速类程序放置于第三层级,将所述加速类程序放置于第二层级,将所述普通类程序放置于第一层级;
15、匀速模式,以及所述匀速模式对应的所述n类程序的第七程序调度方式,所述第七程序调度方式为:将所述避险类程序和所述减速类程序放置于第三层级,将所述加速类程序和所述普通类程序放置于第二层级。
16、在一些实施例中,每个所述程序调度层级中设置有一个时间轮;
17、所述按照所述目标程序调度方式,执行所述n类程序的调度,包括:
18、针对每一程序调度层级,在所述程序调度层级中存在程序时,在所述程序调度层级设置的时间轮内执行所述程序,或者,
19、在所述程序调度层级中不存在程序时,将所述程序调度层级设置的时间轮分配至所述程序调度层级的下一程序调度层级。
20、在一些实施例中,每个所述程序调度层级中存在与每类程序一一对应的一个执行队列和一个就绪队列;所述各类程序均存放在对应的执行队列中;
21、所述在所述程序调度层级中的时间轮内执行所述程序,包括:
22、在预设单位时长内执行所述程序调度层级中执行队列的第一程序,所述第一程序为排列在所述执行队列中队首的程序;
23、在所述第一程序执行完毕之后,将所述第一程序分配至所述第一程序对应的就绪队列;
24、在所述程序调度层级中的时间轮未用完的情况下,确定所述程序调度层级中的执行队列中是否存在程序;
25、在所述程序调度层级中的执行队列中存在程序的情况下,返回执行所述在预设单位时长内执行所述程序调度层级中执行队列的第一程序的步骤,在所述程序调度层级中的执行队列中不存在程序的情况下,将所述就绪队列中的程序分配至对应的所述执行队列,并返回执行所述在预设单位时长内执行所述第一程序调度层级中执行队列的第一程序的步骤。
26、在一些实施例中,所述针对每一程序调度层级,在所述程序调度层级中存在程序时,在所述程序调度层级中的时间轮内执行所述程序之前,所述方法还包括:
27、针对每一程序调度层级,在所述程序调度层级被禁止调度的情况下,将所述程序调度层级中的时间轮分配至所述程序调度层级的下一程序调度层级;
28、在所述程序调度层级未被禁止调度的情况下,执行所述在所述程序调度层级中的时间轮内执行所述程序的步骤。
29、在一些实施例中,所述获取车辆当前所处的目标行驶模式,包括:
30、获取所述车辆的目标信号,所述目标信号用于表征所述车辆的瞬时行驶状态;
31、确定所述目标信号的信号能量;
32、将所述信号能量和预设的能量阈值进行比较,根据比较结果确定所述车辆当前所处的目标行驶模式。
33、在一些实施例中,所述目标信号包括加速信号、减速信号、左转信号、右转信号、匀速信号和跌落信号,所述能量阈值包括第一能量阈值,所述第一能量阈值包括加速能量阈值、减速能量阈值、左转能量阈值、右转能量阈值、匀速能量阈值和跌落能量阈值;
34、所述将信号能量和预设的能量阈值进行比较,根据比较结果确定所述车辆当前所处的目标行驶模式,包括以下至少一项:
35、在p个连续的加速信号能量大于或者等于所述加速能量阈值的情况下,将所述车辆当前所处的目标行驶模式确定为加速模式,所述加速信号能量为所述加速信号的信号能量;
36、在p个连续的减速信号能量大于或者等于所述减速能量阈值的情况下,将所述车辆当前所处的目标行驶模式确定为减速模式,所述减速信号能量为所述减速信号的信号能量;
37、在p个连续的左转信号能量大于或者等于所述左转能量阈值的情况下,将所述车辆当前所处的目标行驶模式确定为左转模式,所述左转信号能量为所述左转信号的信号能量;
38、在p个连续的右转信号能量大于或者等于所述右转能量阈值的情况下,将所述车辆当前所处的目标行驶模式确定为右转模式,所述右转信号能量为所述右转信号的信号能量;
39、在p个连续的匀速信号能量大于或者等于所述匀速能量阈值的情况下,将所述车辆当前所处的目标行驶模式确定为匀速模式,所述匀速信号能量为所述匀速信号的信号能量;
40、在p个连续的跌落信号能量大于或者等于所述跌落能量阈值的情况下,将所述车辆当前所处的目标行驶模式确定为跌落模式,所述跌落信号能量为所述跌落信号的信号能量;
41、其中,所述p为正整数。
42、在一些实施例中,所述能量阈值包括第一能量阈值和第二能量阈值,所述第一能量阈值大于所述第二能量阈值,所述将信号能量和预设的能量阈值进行比较,根据比较结果确定所述车辆当前所处的目标行驶模式,包括:
43、在至少k个连续的所述信号能量小于第一能量阈值且大于或等于第二能量阈值,且所述k个连续的所述信号能量的接收顺序符合预设信号顺序情况下,将所述车辆当前所处的目标行驶模式确定为侧倾模式或者颠簸模式,k为正整数。
44、在一些实施例中,所述预设信号顺序包括第一信号顺序、第二信号顺序和第三信号顺序,所述在至少k个连续的所述信号能量小于第一能量阈值且大于或等于第二能量阈值,且至少所述k个连续的所述信号能量的接收顺序符合预设信号顺序情况下,将所述车辆当前所处的目标行驶模式确定为侧倾模式或者颠簸模式,包括:
45、在所述预设信号顺序为第一信号顺序,且所述至少k个连续的信号能量包括左转信号能量的情况下,将所述车辆当前所处的目标行驶模式确定为侧倾模式,其中,在所述第一信号顺序中,信号能量的接收顺序从先到后依次为左转信号能量、跌落信号能量、右转信号能量和匀速信号能量;
46、或者,在所述预设信号顺序为第二信号顺序,且所述至少k个连续的信号能量包括右转信号能量的情况下,将所述车辆当前所处的目标行驶模式确定为侧倾模式,其中,在所述第二信号顺序中,信号能量的接收顺序从先到后依次为右转信号能量、跌落信号能量、左转信号能量和匀速信号能量。
47、在一些实施例中,所述预设信号顺序包括第三信号顺序,所述在至少k个连续的所述信号能量小于第一能量阈值且大于或等于第二能量阈值,且至少所述k个连续的所述信号能量的接收顺序符合预设信号顺序情况下,将所述车辆当前所处的目标行驶模式确定为侧倾模式或者颠簸模式,包括:
48、在所述预设信号顺序为第三信号顺序,且所述至少k个连续的信号能量包括跌落信号能量的情况下,将所述车辆当前所处的目标行驶模式确定为颠簸模式,所述第三信号顺序为所述跌落信号能量为首次接收的信号能量。
49、在一些实施例中,所述确定所述目标信号的信号能量为:
50、获取所述车辆的第一加速度,所述第一加速度为所述目标信号的持续时间内的加速度;
51、获取所述目标信号的出现时间和消失时间;
52、将所述第一加速度、所述出现时间和所述消失时间输入信号能量计算公式,得到所述目标信号的信号能量;
53、所述信号能量计算公式为:
54、
55、其中,f为信号能量,c为预先设置的目标信号的信号权重,a为车辆的第一加速度,t0为目标信号的出现时间,t1为目标时间;
56、在所述目标信号的持续时长小于或等于预设的第一时长的情况下,所述目标时间为目标信号的消失时间,或,在所述目标信号的持续时长大于所述第一时长的情况下,所述目标时间为t0之后第一时长的时间,第一时长为提前设置的信号强度中目标信号的最大规定持续时长。
57、第二方面,本技术实施例提供一种车辆操作系统的调度装置,装置包括:
58、获取模块,用于获取车辆当前所处的目标行驶模式;
59、设置模块,用于根据对应关系,确定所述目标行驶模式对应的目标程序调度方式,所述对应关系包括:行驶模式对应的至少一个程度调度方式,所述程序调度方式用于将n类程序调度至m个具有不同优先级的程序调度层级,其中,n和m为正整数;
60、调度模块,用于按照所述目标程序调度方式,执行所述n类程序的调度。
61、第三方面,本技术实施例提供了一种车辆操作系统的调度设备,设备包括:处理器以及存储有计算机程序指令的存储器;
62、处理器执行计算机程序指令时实现如上的车辆操作系统的调度方法。
63、第四方面,本技术实施例提供了一种计算机存储介质,计算机存储介质上存储有计算机程序指令,计算机程序指令被处理器执行时实现如上的车辆操作系统的调度方法。
64、第五方面,本技术实施例提供了一种车辆,所述车辆包括计算机程序指令,所述计算机程序指令被处理器执行时实现如上的车辆操作系统的调度方法。
65、本技术通过确定当前的目标行驶模式,并根据目标行驶模式将车辆操作系统中的程序按类别放置在预先设置的m个程序调度层级上,并按照m个程序调度层级的优先级顺序,依次调度m个程序调度层级中各层级,如此一来,车辆可以根据行驶模式的不同,采用不同的方式调度车辆,在车辆发生异常情况时及时响应,从而保证行车的安全性。
- 还没有人留言评论。精彩留言会获得点赞!