一种基于粒子群算法的垃圾收运车辆路径多目标优化方法
本发明涉及智能化车辆配置领域,具体为一种基于粒子群算法的垃圾收运车辆路径多目标优化方法。
背景技术:
1、随着城市化进程的加快,人口的增加及城市范围的扩大,我国居民的生活和消费水平也在不断提高,这就导致城市生活垃圾的产生量也在逐步上升。垃圾种类的多样性给收集、运输带来了更大的挑战,如何高效的调配收运车辆、合理规划收运路径、降低收运过程中产生的碳排放量变得极为重要。
2、目前垃圾分类还没有完全普及,垃圾收运模式还存在混装混运的问题,造成收运不及时、垃圾堆放成山的情况。据统计,垃圾收运这个环节所产生的费用占据垃圾“投、收、运、处”全过程成本的80%,产生的碳排放量会对环境造成污染,涉及经济、环境、技术等多方面的效益。城市环卫部门和环卫企业作为城市生活垃圾收运工作的主体,在低碳政策的约束下,实现垃圾绿色、高效收运具有重要意义。通过对收运车辆合理调配、收运路径多目标优化,有利于提高运输成本的经济效益、降低碳排放带来的环境污染,从而促进城市生活垃圾收运的可持续发展。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述存在的问题,提出了本发明。
3、因此,本发明解决的技术问题是:现有的垃圾收运模式存在混装混运的问题,造成收运不及时、垃圾堆放成山的情况,且产生的碳排放量会对环境造成污染,通过对收运车辆合理调配、收运路径多目标优化,有利于提高运输成本的经济效益、降低碳排放带来的环境污染,从而促进城市生活垃圾收运的可持续发展。
4、为解决上述技术问题,本发明提供如下技术方案:一种基于粒子群算法的垃圾收运车辆路径多目标优化方法,包括:
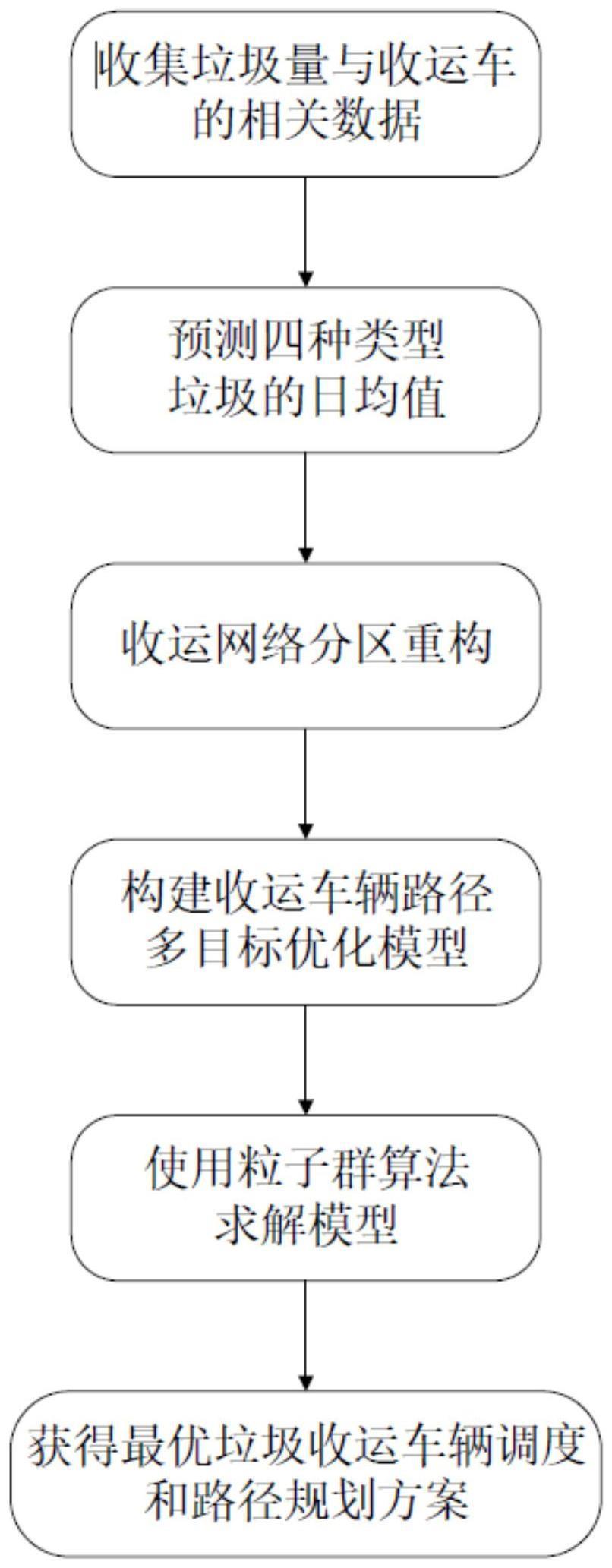
5、收集垃圾量与收运车的相关数据;
6、统计各垃圾收集点的垃圾量数据,计算每种类型垃圾量的日均值,发现其变化规律来预测未来每种类型垃圾量的日均值;
7、使用聚类的方法对区域内各垃圾收集点构成的收运网络进行分区重构;
8、综合考虑垃圾收运的经济效益和环境效益,基于垃圾分类和多种约束条件构建收运车辆路径多目标优化模型;
9、采用粒子群算法对建立的收运车辆路径多目标优化模型进行求解得到最优的垃圾收运车辆调度和路径规划方案。
10、作为本发明所述的基于粒子群算法的垃圾收运车辆路径多目标优化方法的一种优选方案,其中:所述垃圾收运的相关数据包括:
11、每日各垃圾收集点的垃圾种类(可回收垃圾、易腐垃圾、其他垃圾和有害垃圾)、数量,收运车辆的类型、数量、行驶轨迹信息、油耗数、配备的人员数和工人已完成的工作量数据。
12、作为本发明所述的基于粒子群算法的垃圾收运车辆路径多目标优化方法的一种优选方案,其中:所述分区重构还包括:
13、使用k-means聚类算法对区域内各垃圾收集点构成的收运网络进行分区,并实现各垃圾收集点的定位和聚类。
14、作为本发明所述的基于粒子群算法的垃圾收运车辆路径多目标优化方法的一种优选方案,其中:所述收运车辆路径多目标优化模型以车辆固定成本最小化、运输成本最小化、碳排放量最小化为目标建立,目标函数具体如下:
15、
16、式中,目标函数主要由车辆运输成本、车辆固定成本、碳排放成本三部分组成。n为区域内的垃圾收集点集合,k为收运车辆集合,dij为收集点i和j之间的距离,ck为车辆k的单位距离运输成本,fk为车辆k的固定成本,fe为单位距离碳排放量,δ为碳排放系数。
17、其中,xijk和yjk用0-1整数决策变量来定义:
18、
19、
20、作为本发明所述的基于粒子群算法的垃圾收运车辆路径多目标优化方法的一种优选方案,其中:所述粒子群算法还包括:
21、对所述收运车辆路径多目标优化模型的目标函数设置约束条件如下:
22、约束条件1:约束所有车辆出发时均为空载状态:
23、
24、式中,qi表示收集点i的垃圾量;
25、约束条件2:约束车辆载荷限制,确保每辆车的载荷不会超过车辆最大载荷量:
26、
27、式中,q表示车辆最大载荷量;
28、约束条件3:约束每个垃圾收集点只能被一辆车清运且只能访问一次:
29、
30、约束条件4:约束每辆收运车都必须从车辆集中点出发,且服务结束后必须返回至车辆集中点:
31、
32、
33、约束条件5:约束所有车辆在每个收集点的工作时间,要在规定时间内完成作业:
34、
35、式中,wik表示收集点i的时间窗宽度,[ai,bi]表示收集点i的工作时间窗。
36、作为本发明所述的基于粒子群算法的垃圾收运车辆路径多目标优化方法的一种优选方案,其中:所述垃圾收运车辆调度和路径规划方案通过粒子群算法操作得到,包括初始化粒子群和速度、计算适应度值、个体最优更新、种群最优更新、生成新的进化种群和判断是否满足终止条件。
37、作为本发明所述的基于粒子群算法的垃圾收运车辆路径多目标优化方法的一种优选方案,其中:所述初始化粒子群和速度包括:
38、分别设置粒子位置和行使速度限制区间,然后对种群的大小、迭代次数、更迭概率中的学习因子进行设置,接下来对参数惯性权重的值进行设置,在使用matlab软件运行粒子群算法时,会从大到小逐渐调整权重,来提高粒子群算法寻找最优解的能力。
39、作为本发明所述的基于粒子群算法的垃圾收运车辆路径多目标优化方法的一种优选方案,其中:所述个体最优更新包括:
40、对于种群中的每一个个体,将得到的适应度值及其先前的个体历史最优值进行对比分析,假如适应度值比历史最优值更加符合要求,那么就保留这个值并且让该值代替之前的个体历史最优值,然后接着进行下一步迭代。
41、作为本发明所述的基于粒子群算法的垃圾收运车辆路径多目标优化方法的一种优选方案,其中:所述种群最优更新包括:
42、将种群中个体产生的适应度值和种群遍历得到的最优位置互相比较,如果这个适应度值比种群历史最优值更加满意,那么就用该适应度值代替历史最优值,否则还是保留历史最优值,选择结束后,继续进行下一步迭代。
43、作为本发明所述的基于粒子群算法的垃圾收运车辆路径多目标优化方法的一种优选方案,其中:所述新的进化种群表示为:
44、xi(t+1)=xi(t)+vi(t+1)
45、vi(t+1)=ω·vi(t)+c1r1(pi(t)-xi(t))+c2r2(pg(t)-xi(t))
46、
47、其中,i=1,2,…,n表示收集点,xi为粒子的位置,vi为粒子的速度,r1和r2为(0,1)之间的任意值,c1和c2表示粒子向pi(个体经过的最优位置)和pg(群体经过的最优位置)的趋近程度,ω为惯性因子,gk为最大迭代次数,ωini为初始惯性权值,ωend为迭代至最大进化代数时的惯性权重。
48、本发明的有益效果:本发明提供的基于粒子群算法的垃圾收运车辆路径多目标优化方法通过聚类分区垃圾收集点,使用粒子群算法求解考虑车辆固定成本、运输成本和碳排放成本最小化构建的多目标优化模型,合理调配收运车辆和优化收运路径,减少环卫企业的收运成本,降低环境污染。
- 还没有人留言评论。精彩留言会获得点赞!