转子机油泵圆弧齿型线设计方法与流程
1.本发明属于汽车发动机和变速箱的机油泵以及机床的供油装置技术领域,具体涉及一种转子机油泵圆弧齿型线设计方法。
背景技术:
2.转子机油泵具有体积小、结构简单、低噪音、运转平稳和容积效率高的特点。随着汽车工业的发展,需求量愈来愈大。但到目前为止,其产品仍需从国外大量进口。转子机油泵的核心部件为内转子和外转子,其中内转子和外转子之间的啮合如图1所示,在图1中,o1为内转子的回转中心,o2为外转子的回转中心,o1和o2间的距离称为偏心距e。内转子的角速度为ω1,在内转子的驱动下,外转子以ω2的角速度同向转动,实现了容积的变化、介质压缩的作用。当内转子的型线改变时,其改变的容积变化的规律,从而影响整个机油泵的性能的优劣。
3.国内机油泵生产厂家的一般做法是对同类产品的内、外转子的型线进行检测获得数据,由于型线的精度要求高,往往是多次检测,修改数据,试验,产品开发周期长。当要求配置不同规格的机油泵时,若无现有产品参照,则开发无法完成。
4.现有技术中,有针对摆线转子泵的设计理论,但是其具有以下缺点:(1)各轮齿同时接触,使得轮齿在相对滑动速度较大处接触时极易磨损;(2)受设计参数的制约,当设计参数使得型线的理论轮廓线曲率半径较小时,形成的实际轮廓线将出现失真,导致设计不能完成。
技术实现要素:
5.本发明拟提供一种转子机油泵圆弧齿型线设计方法,能设计出圆弧齿型线的内转子和外转子。
6.为此,本发明所采用的技术方案为:一种转子机油泵圆弧齿型线设计方法,所述转子机油泵圆弧齿型线包括内转子的圆弧齿型线和外转子的圆弧齿型线,其中内转子的圆弧齿型线中所有轮齿的型线相同,且每个轮齿的型线对称设置,外转子的圆弧齿型线中所有轮齿的型线相同,且每个轮齿的型线对称设置,在内转子与外转子的轮齿之间存在齿间间隙;
7.还包括以下步骤:
8.s1:设计出内转子的半齿型线,内转子的半齿型线由几段光滑圆弧曲线和一段过渡曲线组成;
9.s2:将s1中设计出的内转子的半齿型线对称能得到内转子的单齿型线,再将内转子的单齿型线旋转形成完整的内转子齿型线;
10.s3:根据齿廓啮合基本定律,通过s2中得到的内转子的型线求得满足啮合基本定律保证定传动比的外转子型线;
11.s4:通过s3中求得的外转子型线求得等距曲线,所述等距曲线为所需的外转子型
线。
12.作为上述方案中的优选,所述s1中内转子的半齿型线由1
′‑2′
、2
′‑3′
、3
′‑4′
、4
′‑5′
、5
′‑6′
、6
′‑7′
六段圆弧曲线和0
′‑1′
一段二次方程过渡曲线组成,在s1中设计的是位于坐标系第三象限内靠近y轴的半齿,且7
′
点的位置为内转子的齿顶与y轴的交点,0
′
点的位置为内转子齿根圆上的点,在0
′
点的切线与水平线之间的夹角为β,则0
′
点和7
′
点的坐标为:
13.x0′
=-r
f1
sinβ,y0′
=r
f1
cosβ,x7′
=0,y7′
=r
a1
14.其中β为内转子轮齿半角,由公式计算可得,其中z1为内转子的齿数,r
f1
为内转子的齿根圆半径,r
a1
为内转子的齿顶圆半径,且r
a1
=r
f1
+2e,其中e为内转子与外转子之间的偏心距;
15.由二次方程的一般形式y=ax2+bx+c求导,能得到切线方程为将0
′
点和1
′
点的坐标,其中1
′
点的坐标为设定值,代入到二次方程里,同时由0
′
点的切线能得到:
[0016][0017]
联立求解,能得到二次方程的系数a、b、c,则得到0
′‑1′
段过渡曲线,然后得到在1
′
点处的曲率中心坐标x
q1
、y
q1
的值为:
[0018]
x
q1
=x1′-(b+2ax1′
)(1+(b+2ax1′
)2)/2a
[0019]yq1
=y1′
+(1+(b+2ax1′
)2)/2a
[0020]
则1
′
点处的曲率半径ρ为:
[0021][0022]
由于0
′‑1′
段与1
′‑2′
段为光滑连接,所以1
′‑2′
段的圆弧中心1点在1
′
点处的曲率中心与1
′
点的连线上,得到0
′
点和1
′
点曲率中心之间的夹角α0为:
[0023][0024]
在指定1
′‑2′
段的圆弧半径r1后,1
′‑2′
段的圆弧中心1点的坐标为:
[0025]
x1=x
q1
+(ρ-r1)sin(β+α0)
[0026]
y1=y
q1
+(ρ-r1)cos(β+α0)
[0027]
在指定1
′‑2′
段的圆心角α1后,则2
′
的坐标为:
[0028]
x2′
=x1+r1sin(β+α0+α1)
[0029]
y2′
=y1+r1cos(β+α0+α1)
[0030]
由于1
′‑2′
段与2
′‑3′
段为光滑连接,则2
′‑3′
段的圆弧中心2点在2
′
点和1点的连
线上,在指定2
′‑3′
段圆心角α2和2
′‑3′
段的半径r2后,2
′‑3′
段圆弧中心2点的坐标和3
′
的坐标为:
[0031]
x2=x1+(r
1-r2)sin(β+α0+α1)
[0032]
y2=y1+(r
1-r2)cos(β+α0+α1)
[0033]
x3′
=x2+r2sin(β+α0+α1+α2)
[0034]
y3′
=y2+r2cos(β+α0+α1+α2)
[0035]
由于2
′‑3′
段与3
′‑4′
段为光滑连接,则3
′‑4′
段的圆弧中心3点在3
′
点和2点的连线上,在指定3
′‑4′
段圆心角α3和3
′‑4′
段的半径r3后,3
′‑4′
段圆弧中心3点的坐标和4
′
的坐标为:
[0036]
x3=x2+(r
2-r3)sin(β+α0+α1+α2)
[0037]
y3=y2+(r
2-r3)cos(β+α0+α1+α2)
[0038]
x4′
=x3+r3sin(β+α0+α1+α2+α3)
[0039]
y4′
=y3+r3cos(β+α0+α1+α2+α3)
[0040]
由于6
′‑7′
段中7
′
点在y轴上,且满足位于y轴的右半齿与左半齿对称且光滑连接,则6
′‑7′
段的圆弧中心6在在y轴上,指定6
′‑7′
段的圆弧半径r6和圆心角后,6
′‑7′
段的圆弧中心6和6
′
的坐标为:
[0041]
x6=0
[0042]
y6=r
a1-r6[0043]
x6′
=x
6-r6sinα6[0044]
y6′
=y6+r6cosα6[0045]
由于5
′‑6′
段与6
′‑7′
段为光滑连接,则5
′‑6′
段的圆弧中心5点在6
′
点和6点的连线上,在指定5
′‑6′
段的圆心角α5和5
′‑6′
段的半径r5后,5
′‑6′
段圆弧中心5点的坐标和5
′
的坐标为:
[0046]
x5=-(r
6-r5)sinα6
[0047]
y5=y6+(r
6-r5)cosα6[0048]
x5′
=x
5-r5sin(α5+α6)
[0049]
y5′
=y
5-r5cos(α5+α6)
[0050]
3点和4
′
点连线的斜率k
34
′
和5点和5
′
点连线的斜率k
55
′
为:
[0051][0052][0053]
由于3
′‑4′
、4
′‑5′
和5
′‑6′
均为光滑连接,则4
′‑5′
段的圆弧中心4在3点和4
′
点连线与5点和5
′
点连线的交点处,则能得4
′‑5′
段的圆弧中心4的坐标为:
[0054]
x4=(y
3-k
34
′
x3)-(y
5-k
55
′
x5)/(k
55
′-k
34
′
)
[0055]
y4=k
34
′
x4+(y
3-k
34
′
x3)
[0056]
则点3到点4的距离l
34
为:
[0057]
[0058]
则4
′‑5′
段的圆弧半径r4和4
′‑5′
段的圆心角α4为:
[0059]
r4=l
34-r3[0060][0061]
由此能得到各段圆弧的圆心坐标、起始角和终止角、各个交点的坐标,因此完成内转子的半齿型线的设计。
[0062]
进一步优选,在s3中外转子型线的计算如下:已知,内转子的节圆半径r1=z1e,其中z1为内转子的齿数,外转子的节圆半径r2=z2e,其中z2为外转子的齿数,假设p1为内转子型线上的一点,则p1点处的法线与内转子节圆的交点为q,且q的坐标满足x2+y2=r
12
,其中在p1点处的法线方程满足由此能得到q点的坐标xq,yq,因此能得到交点、内切圆的中心和节点之间的夹角为将内转子型线绕圆形旋转使q点与节点重合,则p1点转到了p1′
点,由坐标旋转公式,求得p1′
点的坐标为:
[0063][0064][0065]
假设在p1′
点与内转子型线相啮合的外转子型线上的点为p2′
,则有
[0066][0067]
假设点p2为外转子型线在未绕着内转子节圆圆形转过时的点,则能得将p2′
点绕外转子节圆中心反转时能得到p2点,其中在由坐标旋转公式,求得p2点的坐标为:
[0068][0069][0070]
不断依次对内转子型线上的点重复上述步骤,则能求得满足啮合基本定律保证定传动比的外转子型线。
[0071]
进一步优选,在s4中等距曲线的计算方法如下:已知,齿间间隙为δ,i点为已求得外转子型线上的一点,则能得到i点的法线斜率ki,i点的法线与x轴的夹角为αi=arctanki,假设j点为要求得的等距曲线上的一点,在j点的坐标为:
[0072]
xi=xj+δcosαi[0073]
yi=yj+δsinαi[0074]
由此能得到等距曲线,所述等距曲线为最终的外转子型线。
[0075]
本发明的有益效果:能设计出一种圆弧齿型的内转子和外转子,圆弧齿型的内转
子和外转子的轮齿接触和传动在相对滑动速度小的位置,不易出现磨损;由于不是所有的轮齿同时接触,降低了加工精度同时方便装配,并且轮齿型线满足齿廓啮合基本定律,传动平稳;由于为圆弧齿,在油膜的作用下,轮齿为面接触,压强小,接触应力小,工作寿命长;内转子和外转子均是通过计算获得的数据,整个型线的精度高,并且与摆线不同,通过本技术的设计方法能实现任意参数的设计,为新品开发提供了技术支持。
附图说明
[0076]
图1为现有技术中内转子与外转子啮合示意图。
[0077]
图2为本发明中内转子的型线图。
[0078]
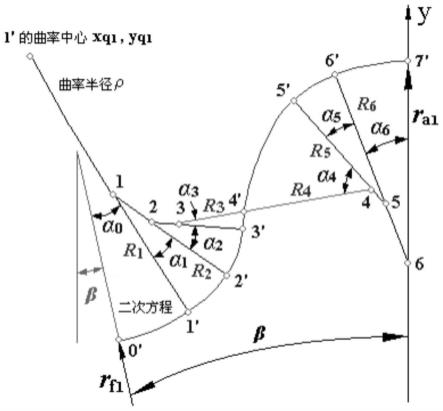
图3为本发明中内转子的半齿型线示意图。
[0079]
图4为本发明中内转子型线与外转子型线啮合示意图。
[0080]
图5为本发明中内转子型线上点p1的法线与节圆之间交点的示意图。
[0081]
图6为本发明中内转子型线上点p1绕节圆中心旋转后的示意图。
[0082]
图7为本发明中外转子上点p2′
绕外转子节圆中心反转时能得到p2的示意图。
[0083]
图8为本发明中在软件中输入参数后得到的内转子半齿型线的示意图。
[0084]
图9为本发明中在软件中得到内转子单齿型线示意图。
[0085]
图10为本发明中在软件中得到完整的内转子型线示意图。
[0086]
图11为本发明中在软件中得到外转子单齿型线示意图。
[0087]
图12为本发明中在软件中得到完整的外转子型线示意图。
[0088]
图13为本发明中本实施例中设计出的内转子和外转子的啮合图。
具体实施方式
[0089]
下面通过实施例并结合附图,对本发明作进一步说明:
[0090]
如图1-图7所示,一种转子机油泵圆弧齿型线设计方法,转子机油泵圆弧齿型线包括内转子的圆弧齿型线和外转子的圆弧齿型线,其中内转子的圆弧齿型线中所有轮齿的型线相同,且每个轮齿的型线对称设置,外转子的圆弧齿型线中所有轮齿的型线相同,且每个轮齿的型线对称设置,在内转子与外转子的轮齿之间存在齿间间隙。
[0091]
具体设计方法包括以下步骤:
[0092]
第一步:设计出内转子的半齿型线,由图2所示内转子的型线特征,可知只要设计出内转子半齿的型线,然后作对称并旋转即能得到整个内转子的型线,内转子的半齿型线由几段光滑圆弧曲线和一段过渡曲线组成。为了方便计算,在本次计算时,内转子的半齿型线由六段光滑圆弧曲线和一段过渡曲线组成,如图3所示。
[0093]
具体地,内转子的半齿型线由1
′‑2′
、2
′‑3′
、3
′‑4′
、4
′‑5′
、5
′‑6′
、6
′‑7′
六段圆弧曲线和0
′‑1′
一段二次方程过渡曲线组成,且设计的是位于坐标系第三象限内靠近y轴的半齿,其中7
′
点的位置为内转子的齿顶与y轴的交点,0
′
点的位置为内转子齿根圆上的点,在0
′
点的切线与水平线之间的夹角为β,则0
′
点和7
′
点的坐标为:
[0094]
x0′
=-r
f1
sinβ,y0′
=r
f1
cosβ,x7′
=0,y7′
=r
a1
[0095]
其中β为内转子轮齿半角,由公式计算可得,其中z1为内转子的齿数,r
f1
为内转子的齿根圆半径,r
a1
为内转子的齿顶圆半径,且r
a1
=r
f1
+2e,其中e为内转子与外转子之间的偏心距;
[0096]
由二次方程的一般形式y=ax2+bx+c求导,能得到切线方程为将0
′
点和1
′
点的坐标,其中1
′
点的坐标为设定值,代入到二次方程里,同时由0
′
点的切线能得到:
[0097][0098]
联立求解,能得到二次方程的系数a、b、c,则得到0
′‑1′
段过渡曲线,然后得到在1
′
点处的曲率中心坐标x
q1
、y
q1
的值为:
[0099]
x
q1
=x1′-(b+2ax1′
)(1+(b+2ax1′
)2)/2a
[0100]yq1
=y1′
+(1+(b+2ax1′
)2)/2a
[0101]
则1
′
点处的曲率半径ρ为:
[0102][0103]
由于0
′‑1′
段与1
′‑2′
段为光滑连接,则1
′‑2′
段的圆弧中心1点在1
′
点处的曲率中心与1
′
点的连线上,得到0
′
点和1
′
点曲率中心之间的夹角α0为:
[0104][0105]
在指定1
′‑2′
段的圆弧半径r1后,1
′‑2′
段的圆弧中心1点的坐标为:
[0106]
x1=x
q1
+(ρ-r1)sin(β+α0)
[0107]
y1=y
q1
+(ρ-r1)cos(β+α0)
[0108]
在指定1
′‑2′
段的圆心角α1后,则2
′
的坐标为:
[0109]
x2′
=x1+r1sin(β+α0+α1)
[0110]
y2′
=y1+r1cos(β+α0+α1)
[0111]
由于1
′‑2′
段与2
′‑3′
段为光滑连接,则2
′‑3′
段的圆弧中心2点在2
′
点和1点的连线上,在指定2
′‑3′
段圆心角α2和2
′‑3′
段的半径r2后,2
′‑3′
段圆弧中心2点的坐标和3
′
的坐标为:
[0112]
x2=x1+(r
1-r2)sin(β+α0+α1)
[0113]
y2=y1+(r
1-r2)cos(β+α0+α1)
[0114]
x3′
=x2+r2sin(β+α0+α1+α2)
[0115]
y3′
=y2+r2cos(β+α0+α1+α2)
[0116]
由于2
′‑3′
段与3
′‑4′
段为光滑连接,则3
′‑4′
段的圆弧中心3点在3
′
点和2点的连
线上,在指定3
′‑4′
段圆心角α3和3
′‑4′
段的半径r3后,3
′‑4′
段圆弧中心3点的坐标和4
′
的坐标为:
[0117]
x3=x2+(r
2-r3)sin(β+α0+α1+α2)
[0118]
y3=y2+(r
2-r3)cos(β+α0+α1+α2)
[0119]
x4′
=x3+r3sin(β+α0+α1+α2+α3)
[0120]
y4′
=y3+r3cos(β+α0+α1+α2+α3)
[0121]
由于6
′‑7′
段中7
′
点在y轴上,且满足位于y轴的右半齿与左半齿对称且光滑连接,则6
′‑7′
段的圆弧中心6在在y轴上,指定6
′‑7′
段的圆弧半径r6和圆心角后,6
′‑7′
段的圆弧中心6和6
′
的坐标为:
[0122]
x6=0
[0123]
y6=r
a1-r6[0124]
x6′
=x
6-r6sinα6[0125]
y6′
=y6+r6cosα6[0126]
由于5
′‑6′
段与6
′‑7′
段为光滑连接,则5
′‑6′
段的圆弧中心5点在6
′
点和6点的连线上,在指定5
′‑6′
段的圆心角α5和5
′‑6′
段的半径r5后,5
′‑6′
段圆弧中心5点的坐标和5
′
的坐标为:
[0127]
x5=-(r
6-r5)sinα6[0128]
y5=y6+(r
6-r5)cosα6[0129]
x5′
=x
5-r5sin(α5+α6)
[0130]
y5′
=y
5-r5cos(α5+α6)
[0131]
3点和4
′
点连线的斜率k
34
′
和5点和5
′
点连线的斜率k
55
′
为:
[0132][0133][0134]
由于3
′‑4′
、4
′‑5′
和5
′‑6′
均为光滑连接,则4
′‑5′
段的圆弧中心4在3点和4
′
点连线与5点和5
′
点连线的交点处,则能得4
′‑5′
段的圆弧中心4的坐标为:
[0135]
x4=(y
3-k
34
′
x3)-(y
5-k
55
′
x5)/(k
55
′-k
34
′
)
[0136]
y4=k
34
′
x4+(y
3-k
34
′
x3)
[0137]
则点3到点4的距离l
34
为:
[0138][0139]
则4
′‑5′
段的圆弧半径r4和4
′‑5′
段的圆心角α4为:
[0140]
r4=l
34-r3[0141][0142]
由此能得到各段圆弧的圆心坐标、起始角和终止角、各个交点的坐标,因此完成内转子的半齿型线的设计。
[0143]
第二步:将第一步中设计出的内转子的半齿型线以y轴为对称轴,作对称处理,能得到内转子的单齿型线。然后再用坐标旋转公式,将单齿型线数据依次旋转β角的2、4、6到2z1后,转形成完整的内转子齿型线。
[0144]
第三步:根据齿廓啮合基本定律,通过第二步中得到的内转子的型线求得满足啮合基本定律保证定传动比的外转子型线。其中齿廓啮合基本定律为过轮齿接触点(啮合点)作公法线,应交连心线o1o2于一定点c,c点称为节点,如图4所示,能得到内转子的节圆半径r1=z1e,其中z1为内转子的齿数,外转子的节圆半径r2=z2e,其中z2为外转子的齿数。
[0145]
具体计算如下:如图5中a所示,p1为内转子型线η1上的一点,则n-n为p1点处的法线,∠p1o1c=α1,如图5中b所示,n-n线与内转子节圆的交点为q,且q的坐标满足x2+y2=r
12
,其中在p1点处的法线方程满足由此能得到q点的坐标xq,yq,因此能得到交点、内切圆的中心和节点之间的夹角为将内转子型线η1绕圆形旋转使q点与节点重合,则p1点转到了p1′
点,如图6中a所示。由坐标旋转公式,求得p1′
点的坐标为:
[0146][0147][0148]
假设在p1′
点与内转子型线相啮合的外转子型线上的点为p2′
,如图6中b所示,则有
[0149][0150]
假设点p2为外转子型线在未绕着内转子节圆圆形转过时的点,则能得将p2′
点绕外转子节圆中心反转时能得到p2点,其中在由坐标旋转公式,求得p2点的坐标为,如图7所示:
[0151][0152][0153]
不断依次对内转子型线上的点重复上述步骤,则能求得满足啮合基本定律保证定传动比的外转子型线。
[0154]
第四步:通过第三步中求得的外转子型线求得等距曲线,等距曲线为所需的外转子型线。
[0155]
等距曲线的计算方法如下:已知,齿间间隙为δ,i点为已求得外转子型线上的一点,则能得到i点的法线斜率ki,i点的法线与x轴的夹角为αi=arctanki,假设j点为要求得的等距曲线上的一点,在j点的坐标为:
[0156]
xi=xj+δcosαi[0157]
yi=yj+δsinαi[0158]
由此能得到等距曲线,等距曲线为最终的外转子型线。由于外转子的圆弧齿型线
中所有轮齿的型线相同,且每个轮齿的型线对称设置,因此只需求得外转子型线的半齿型线后,进行对称旋转即能得到完整的外转子型线。
[0159]
为方便实际应用时的设计,将整个设计过程应用到软件中,现以齿数z1=9,z2=10的转子泵为例。
[0160]
设计的具体参数如下:r
f1
=24.95mm,e=3.2mm,则内转子半齿设计如图8所示,再将其关于y轴做对称,生成单齿数据如图9所示,再旋转生成完成的内转子型线,如图10所示。设计出的内转子型线上点具体坐标如表1所示。
[0161]
表1内转子型线坐标
[0162]
[0163][0164]
在内转子型线的基础上,通过确定齿间间隙得到外转子的单齿型线如图11所示,然后旋转生成完整的外转子型线,如图12所示。设计出的外转子型线上点的具体坐标如表2所示。
[0165]
表2内转子型线坐标
[0166]
[0167]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1