基于VMD和稀疏采样点云的复杂曲面形貌高保真重构方法
本发明涉及了一种曲面零件重构方法,具体是涉及了一种基于vmd(变分模态分解,variational_mode_decomposition)和实测稀疏采样点云的复杂曲面形貌高保真重构建模方法。
背景技术:
1、高保真曲面重构是三维重建中的重要组成部分,该技术的目的在于重建曲面零件的三维模型,并且保留其中的加工形貌特征。由于复杂曲面零件往往用于关键零部件上,例如飞机涡轮发动机叶片、螺旋桨、柴油机曲轴等,因此曲面零件的性能往往是需要重点关注的对象。而曲面零件的表面形貌往往又是影响零件性能的重要因素,例如涡轮发动机的叶片,其表面形貌决定了流动损失。
2、因此,目前存在的不足主要有以下两点:
3、(1)目前提出的建模方法大多基于理想表面,无法建立出真实特征的曲面,因此也就无法对于零件的真实形貌进行仿真分析以及计算。为了得到更加符合性能要求的表面形貌,在建模阶段就需要考虑零件的不同加工过程对零件表面形貌可能产生的影响。
4、(2)若要还原高保真的建模模型,则需要采集大量的高分辨率的数据点,这在一般情况下是无法满足的。
5、针对以上情况,对于复杂的曲面零件表面,需要一种高保真的建模方法来体现真实的零件表面形貌特征,同时尽可能的减小数据采集量。
技术实现思路
1、为了解决背景技术中存在的问题,本发明的目的在于提供了一种基于vmd和稀疏采样点云的复杂曲面形貌高保真重构方法,解决了在目前一般的建模方法中,大多基于理想表面建模无法建立出符合真实形貌特征的曲面零件或需要大量高分辨率数据的问题。
2、为了实现上述目的,本发明采用的技术方案是:
3、步骤(1):针对同一个零件,分别进行高分辨率采样和稀疏采样获得高分辨率零件表面点云和稀疏采样点云;
4、具体是采用高、低分辨率的扫描仪对零件进行采集获得点云数据。
5、所述的高分辨率采样相比稀疏采样的采样分辨率更高,稀疏采样相比高分辨率采样的采样分辨率更低。
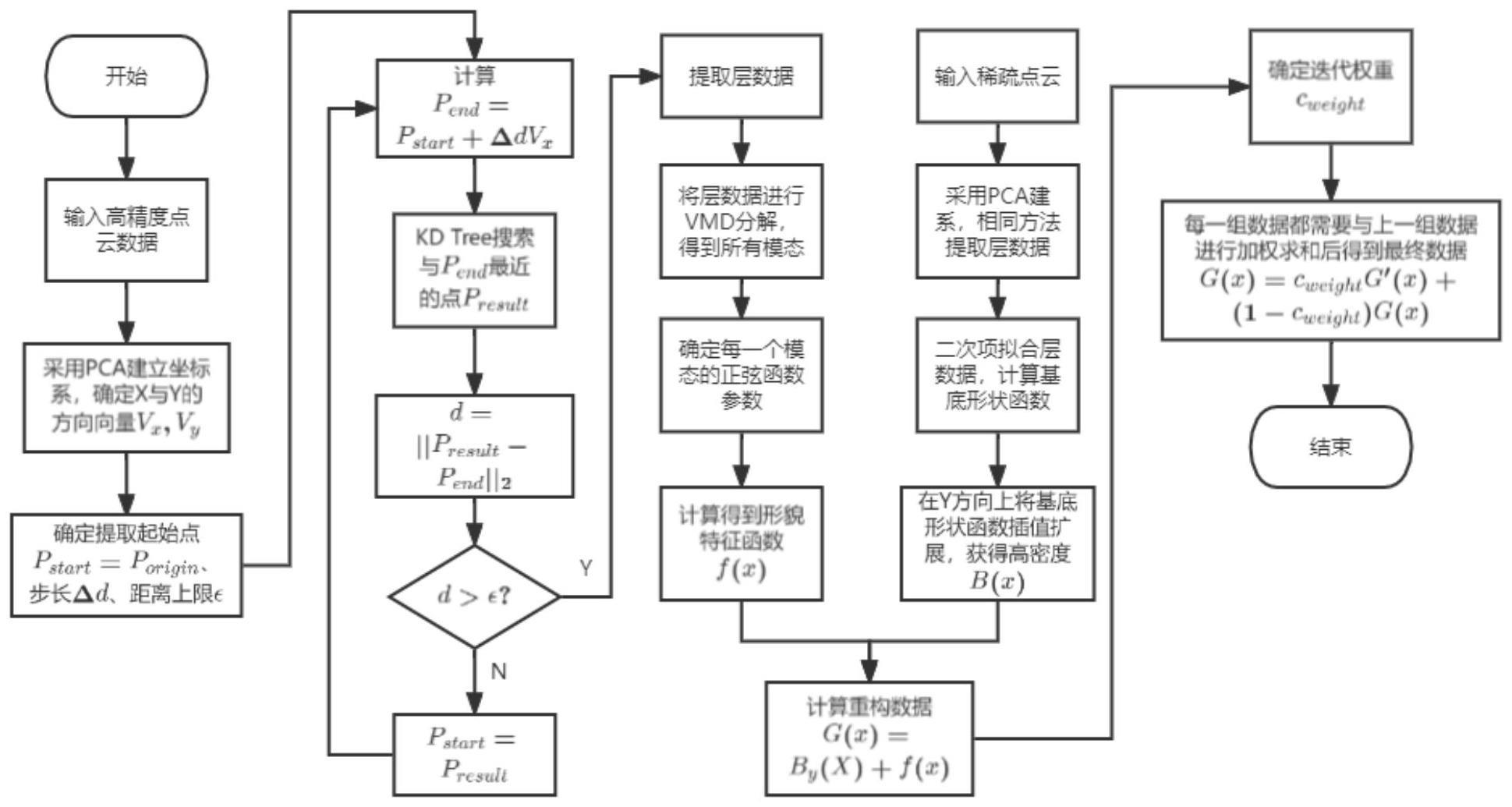
6、步骤(2):采用主成分分析(principal component analysis,pca)方法对高分辨率零件表面点云进行处理获得特征值,根据特征值的特征向量确定x、y和z轴的方向向量,建立点云xyz坐标系,从中以x方向提取各层的层数据;
7、步骤(3):对于高分辨率零件表面点云的每一层的层数据,去除形状部分,再对剩余部分进行vmd分解获得k个模态,接着对每一个模态分别进行正弦函数拟合后相加得到该层沿x轴方向的形貌特征函数;
8、步骤(4):对于稀疏采样点云,按照步骤(2)和步骤(3)进行相同处理得到各层的层数据和沿x轴方向的基底形状函数;
9、步骤(5):将稀疏采样点云沿x轴方向的基底形状函数在y轴方向上进行插值扩展;
10、步骤(6):根据步骤(3)获得的形貌特征函数f(x)和步骤(5)线性插值获得的基底形状函数进行形貌重构处理获得形貌重构数据,实现高保真重构。
11、所述步骤(2)和(4)中的层分布均相同,均按照三维打印的分层。
12、所述步骤(2)具体为:
13、(2.1)首先针对点云建立整体点云坐标系,将点云中的所有点组合成一个数据集矩阵k:
14、
15、其中,xn、yn、zn分别表示第m个点在整体点云坐标系中的xyz三轴坐标;
16、接着计算数据集矩阵k的协方差矩阵v:
17、
18、其中,m为点云中的点数量,kt为k的转置,t表示矩阵转置;
19、(2.2)求取协方差矩阵c的三个特征值,将三个特征值从大到小排列后分别求出各自对应的特征向量,则排列好的三个特征值的特征向量依次作为x轴、y轴和z轴的方向向量,以整个点云的重心作为原点建立点云xyz坐标系;
20、(2.3)在点云xyz坐标系中,沿x轴以固定间距采集点云数据中的点获得层数据。
21、所述层数据,即为类似一条曲线上的点集,由于点云数据采集时为固定间距采集,因此存在一定的方向性。
22、本发明采用一种层级结构来处理数据,具体定义为,将点云中某一个点的y值作为层数,该y值所在的xz平面与样本数据的相交点集,即为该y值对应的层数据,能够方便计算,减少数据量。
23、所述步骤(2.3)中的层数据具体提取过程为:
24、(2.3.1)在点云数据中,在当前层中初始确定初始点porigin,设置迭代起始点pstart,开始迭代时pstart=porighin;
25、(2.3.2)按照以下公式计算确定结束参考点pend:
26、pend=pstart+δdvx
27、其中,vx表示x轴的方向向量,δd表示根据采样的实际分辨率预先设置的步进步长;
28、(2.3.3)采用kd tree数据结构搜索点云数据中与结束参考点pend距离最近的点作为结果点presult,判断结束参考点pend和结果点presult之间的距离d是否超出预设的距离上限阈值∈:
29、若小于等于距离上限阈值∈,则结果点presult作为所需数据点;
30、若第一次获得的结果点presult和结束参考点pend之间的距离d不小于距离上限阈值∈,则停止迭代,回到在步骤(2.3.1)当前层重新确定初始点porigin进行处理;
31、若非第一次获得的结果点presult和结束参考点pend之间的距离d不小于距离上限阈值∈,则停止迭代;
32、(2.3.4)使用结果点presult代替起始点pstart回到步骤(2.3.2),不断重复步骤(2.3.2)和(2.3.3)进行迭代,直到距离d>∈停止迭代,获得所有结果点presult,最终将所有结果点presult构成当前层的层数据提取出。
33、所述步骤(3),具体为:
34、从步骤(2)中提取出来的每一层数据中去除形状部分,对去除形状部分后剩下的部分进行k模态的vmd分解获得k个模态,分解出来的k个模态分别为imf1,imf2,...,imfk,则对每一个模态建立一个正弦的拟合函数φ1,φ2,...,φk,再将所有模态的拟合函数相加建立沿x轴方向的形貌特征函数f(x),表示如下:
35、
36、
37、an=0.5(max(imfn)-min(imfn))
38、cn=average(imfn)
39、其中,n表示模态的序数,an表示排除异常值参数,ωn表示模态的中间频率值,表示模态的相位参数,cn表示模态的平均值,max( )表示取最大值函数,min( )表示取最小值函数,average()表示取平均数,k表示模态的总数,x表示沿x轴的值,作为自变量。
40、所述的形状部分为层数据进行二次项拟合后得到的二次函数的部分。
41、本发明考虑到每一个模态在形状上都具有波动性,将模态抽象成正弦函数,这样能够较好地符合模态的周期性波动特点,且计算误差较小,在准确拟合上具有较好的效果。
42、所述步骤(4)中,对于稀疏采样点云,同样采用和步骤(1)和步骤(2)的相同方法进行处理获得各层的层数据和沿x轴方向的形貌特征函数,其中各层的形貌特征函数作为稀疏采样点云各层沿x轴方向的基底形状函数。
43、所述的基底形状函数,也是即将每一层数据进行二次项拟合后得到的二次函数,采用基底形状函数来表征曲面零件层数据的基本形状。
44、所述步骤(5)中,具体方法为:
45、预先在步骤(4)获得的相邻两层的基底形状函数与之间确定待求点(x′,y′,z′)作为重构起点,根据待求点(x′,y′,z′)和步骤(4)获得的相邻两层的基底形状函数之间的关系获得:
46、
47、d0+d1=l
48、其中,by′(x)表示待求点(x′,y′,z′)所在层的沿x轴方向的基底形状函数,d0为重构起点距相邻的一基底形状函数之间的最短距离,d1为重构起点距相邻的另一基底形状函数之间的最短距离,l为基底形状函数与基底形状函数之间的最短距离,c表示波动性参数;
49、本发明在计算by′(x)时考虑在y方向上的波动性,加入了一个常数c进行补偿,这样能够保证基底形状函数过度平滑,并且起到了保证精度的效果。
50、波动性参数c是根据计算为:
51、
52、其中,by′(y)为待求点(x′,y′,z′)所在层沿y轴方向的基底形状函数,分别表示与当x取x′时的取值。
53、所述的波动性参数c是由求取待求点y′处的基底形状函数与线性插值之后的基底形状函数相减得到偏移量而获得。
54、所述步骤(6)中,具体步骤为:
55、(6.1)针对步骤(3)获得的各层的形貌特征函数f(x)和步骤(5)线性插值获得的各层的基底形状函数进行融合处理:
56、对于线性插值后相比各层形貌特征函数原有层的基底形状函数,将相同层的形貌特征函数按照以下公式施加到相同层的基底形状函数上获得在x轴方向上细化后的初步重构数据g(x):
57、gi(x)=byi(x)+fi(x)
58、其中,gi(x)表示第i层的初步重构数据g(x),byi(x)表示第i层沿x轴方向的基底形状函数,fi(x)表示第i层的形貌特征函数;
59、重构后的数据分辨率与原始高精度采样分辨率相同。
60、(6.2)对于每一层,将自身的初步重构数据与上一层计算出来的初步重构数据进行加权求和获得最终形貌重构数据,如下式:
61、gi’(x)=cweightgi-1(x)+(1-cweight)gi(x)
62、其中,g′(x)为第i层的最终形貌重构数据,gi-1(x)表示第i-1层的初步重构数据,cweight表示预设的重构权重。
63、本发明预先设置了一个权重cweight,将形貌特征函数施加到基底形状函数上,以一种曲面形貌特征复用的迭代重构处理,能够显著提高计算精度。
64、本发明是对某曲面的高分辨率采样点云,利用pca确定主方向,按主方向进行数据分层,对每一层数据通过vmd方法分解为k个模态,采用形貌特征函数将分解的每一个模态进行拟合,识别出适用当前复杂曲面的一组形貌特征参数。实测获得同一曲面其他区域的稀疏采样点云,确定主方向后,拟合其基底形状函数,将基底形状函数进行插值扩展,复用前述识别的曲面形貌特征参数,通过对多个特征参数的迭代运算,对曲面表面点云进行重构及预测建模,最终实现稀疏采样区域的高保真曲面形貌重构建模。
65、由于采用上述技术方案,本发明取得的有益效果是:
66、本发明的整体重建精度较高,能够较好地达到还原零件表面形貌特征的目的,并且不失去原本的形状特征。
67、本发明的采集点数据量大大减小,在不需要大量的采集数据点的基础上,进行高保真模型重构,精度也得到了保证。
68、本发明具有采样数据量较小、重构精度高、算法复杂度较低等特点,适用于复杂曲面零件表面的高效预测建模。
- 还没有人留言评论。精彩留言会获得点赞!