车辆位姿信息处理方法、装置、设备及存储介质与流程
本发明涉及自动驾驶,尤其涉及一种车辆位姿信息处理方法、装置、设备及存储介质。
背景技术:
1、车辆实时定位是自动驾驶系统中不可或缺的关键模块,车辆实时定位系统为下游的规划、感知模块提供车辆实时位姿信息,方便车辆更好地决策和控制。目前主流的车辆定位方案多是采用多传感器融合的方案,融合惯性测量单元(inertial measurement unit,imu)、全球定位系统(global positioning system,gps)、激光雷达(laser radar,lidar)以及轮速计来实现多场景下的车辆定位。利用各种传感器的互补性,这类方案可以覆盖大多数场景下的精确定位任务,但在隧道等退化场景中,gps信号的弱,在隧道环境下确定的位姿信息误差大,而且由于大多数隧道都不存在明显的纹理特征,基于通用lidar的位姿信息处理方案通常也会失效,难以给出准确的纵向位置,仍存在定位困难的问题。
2、解决隧道等退化场景中的定位问题,可以采用室内辅助定位方案,比如超宽带(ultra wide band,uwb)技术,wi-fi定位等,但是,在长隧道中采用uwb或者wi-fi的方案则需要额外的设备铺设成本和政策支持,代价较大。目前,大多数方案都是依赖精确校准的轮速计提供相对准确的纵向位置,而依赖轮速计的方案有较多局限性,一是即使轮速计经过精确校准,其在长时间积分后还是会产生较大的累积误差;另一方面就是轮速本身的校准参数也会随着时间改变,一旦在进入隧道时未得到准确的校准参数,即使隧道不长,也依然会产生较大的累积误差,因此,如何在隧道中确定位姿信息,以及降低方案中对轮速计的依赖,是当前亟需解决的技术问题。
技术实现思路
1、本发明提供了一种车辆位姿信息处理方法、装置、设备及存储介质,用于提取隧道场景中有效的点云特征,进行车辆位姿信息处理,降低隧道中车辆位姿信息处理对轮速计的依赖,实现隧道场景中全程可靠精确定位,也不需要引入额外的辅助设备,降低了隧道场景中确定车辆位姿信息成本。
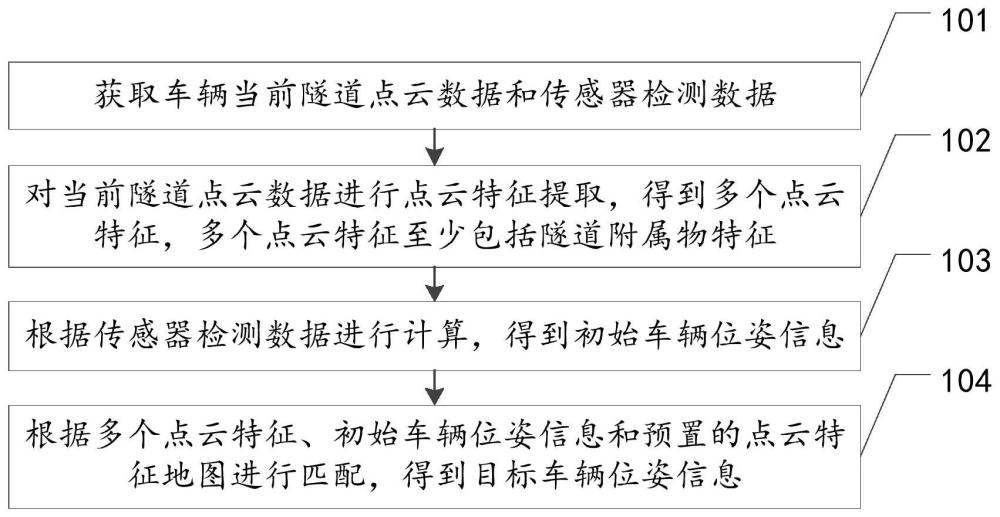
2、本发明第一方面提供了一种车辆位姿信息处理方法,包括:获取车辆当前隧道点云数据和传感器检测数据;对当前隧道点云数据进行点云特征提取,得到多个点云特征,多个点云特征至少包括隧道附属物特征;根据传感器检测数据进行计算,得到初始车辆位姿信息;根据多个点云特征、初始车辆位姿信息和预置的点云特征地图进行匹配,得到目标车辆位姿信息。
3、在一种可行的实施方式中,对当前隧道点云数据进行点云特征提取,得到多个点云特征,包括:对当前隧道点云数据进行隧道附属物特征提取,得到至少一个隧道附属物特征;对当前隧道点云数据进行近地特征提取,得到多个近地特征;将至少一个隧道附属物特征和多个近地特征,确定为当前隧道点云数据对应的多个点云特征。
4、在一种可行的实施方式中,对当前隧道点云数据进行隧道附属物特征提取,得到至少一个隧道附属物特征,包括:对当前隧道点云数据进行地面点过滤,得到多个非地面点;对多个非地面点进行隧道附属物边缘点提取,得到多个隧道附属物边缘点;根据多个隧道附属物边缘点生成至少一个隧道附属物特征。
5、在一种可行的实施方式中,对当前隧道点云数据进行近地特征提取,得到多个近地特征,包括:对当前隧道点云数据进行近地特征提取,得到路沿特征、地面特征、路面标示线特征;将路沿特征、地面特征和路面标示线特征组合为多个近地特征。
6、在一种可行的实施方式中,根据多个点云特征、初始车辆位姿信息和预置的点云特征地图进行匹配,得到目标车辆位姿信息,包括:获取当前车辆速度,并根据当前车辆速度对多个点云特征中每个点云特征进行运动补偿,得到多个补偿后的点云特征;根据初始车辆位姿信息和预置的点云特征地图,生成局部点云特征地图;将多个补偿后的点云特征和局部点云特征地图进行匹配,得到总匹配误差;根据总匹配误差对初始车辆位姿信息进行优化,得到目标车辆位姿信息。
7、在一种可行的实施方式中,根据总匹配误差对初始车辆位姿信息进行优化,得到目标车辆位姿信息,包括:对总匹配误差进行解析,得到多个特征点的匹配误差;根据每个特征点的匹配误差对初始车辆位姿信息进行约束,得到目标车辆位姿信息。
8、在一种可行的实施方式中,多个特征点包括隧道附属物特征点、路沿特征点、地面点和路面标示线点,根据每个特征点的匹配误差对初始车辆位姿5信息进行约束,得到目标车辆位姿信息,包括:根据每个隧道附属物特征点
9、的匹配误差和每个路面标示线点的匹配误差对初始车辆位姿信息进行纵向位置约束和横向位置约束,得到第一车辆位姿信息;根据每个路沿特征点的匹配误差对第一车辆位姿信息进行横向位置约束和偏航角约束,得到第二车辆
10、位姿信息;根据每个地面点的匹配误差对第二车辆位姿信息进行高度位置约0束、俯仰角约束和翻滚角约束,得到目标车辆位姿信息。
11、在一种可行的实施方式中,根据多个点云特征、初始车辆位姿信息和预置的点云特征地图进行匹配,得到目标车辆位姿信息,包括:根据每个点云特征对应的匹配策略,将多个点云特征中每个特征点与预置的点云特征地图
12、进行匹配,并计算每个特征点的匹配误差,得到总匹配误差;根据总匹配误5差对初始车辆位姿信息进行优化,得到平滑车辆位姿信息;根据平滑车辆位姿信息进行匹配迭代,直至满足迭代终止条件,得到目标车辆位姿信息。
13、在一种可行的实施方式中,点云特征地图包括多个匹配点,根据每个点云特征对应的匹配策略,将多个点云特征与预置的点云特征地图进行匹配,
14、并计算每个特征点的匹配误差,得到总匹配误差,包括:根据点面匹配策略0计算多个点云特征中每个地面点与预置的点云特征地图中多个匹配点所在平
15、面的距离,得到第一匹配误差;根据点线匹配策略计算多个点云特征中其他特征的每个特征点与点云特征地图中两个最近匹配点所在直线的距离,得到第二匹配误差,其他特征包括隧道附属物特征、路面标示线特征和路沿特征;
16、将第一匹配误差和第二匹配误差进行运算,得到总匹配误差。
17、5在一种可行的实施方式中,在根据点面匹配策略计算多个点云特征中每个地面点与预置的点云特征地图中多个匹配点所在平面的距离,得到第一匹配误差之后,还包括:根据点点匹配策略计算多个点云特征中其他特征的每个特征点与点云特征地图中各个匹配点的距离,并将最小距离确定为第三匹配误差;将第一匹配误差、第三匹配误差进行运算,得到总匹配误差。
18、0在一种可行的实施方式中,在根据点面匹配策略计算多个点云特征中每个地面点与预置的点云特征地图中多个匹配点所在平面的距离,得到第一匹配误差之后,还包括:根据点点匹配策略和预置的第一距离范围确定多个点云特征中其他特征的每个特征点在点云特征地图中对应的多个匹配点;计算每个特征点与多个匹配点的距离均值,并将距离均值确定为第四匹配误差;将第一匹配误差、第四匹配误差进行运算,得到总匹配误差。
19、在一种可行的实施方式中,在根据多个点云特征、初始车辆位姿信息和预置的点云特征地图进行匹配,得到目标车辆位姿信息之后,还包括:获取多个传感器检测数据,多个传感器检测数据至少包括惯性测量单元检测数据和轮速计检测数据;将多个传感器检测数据进行融合,得到融合车辆位姿信息;根据融合车辆位姿信息和预置的扩展卡尔曼滤波算法,对目标车辆位姿信息进行优化,得到定位结果。
20、在一种可行的实施方式中,在根据融合车辆位姿信息和预置的扩展卡尔曼滤波算法,对目标车辆位姿信息进行优化,得到定位结果之后,还包括:获取当前工作模式,当前工作模式为在线模式或离线模式;在当前工作模式为离线模式时,根据定位结果和多个点云特征对点云特征地图进行全局优化,得到优化后的点云特征地图。
21、本发明第二方面提供了一种车辆位姿信息处理装置,包括:获取模块,用于获取车辆当前隧道点云数据和传感器检测数据;提取模块,用于对当前隧道点云数据进行点云特征提取,得到多个点云特征,多个点云特征至少包括隧道附属物特征;计算模块,用于根据传感器检测数据进行计算,得到初始车辆位姿信息;匹配模块,用于根据多个点云特征、初始车辆位姿信息和预置的点云特征地图进行匹配,得到目标车辆位姿信息。
22、在一种可行的实施方式中,提取模块具体用于:对当前隧道点云数据进行地面点过滤,得到多个非地面点,对多个非地面点进行初步的隧道附属物特征分割,得到多个候选隧道附属物特征,将多个候选隧道附属物特征输入注意力机制的边缘检测网络,对多个候选隧道附属物特征的进行边缘点提取加强,得到多个隧道附属物边缘点;根据多个隧道附属物边缘点生成至少一个隧道附属物特征。
23、在一种可行的实施方式中,提取模块包括:第一特征提取单元,用于对当前隧道点云数据进行隧道附属物特征提取,得到至少一个隧道附属物特征;第二特征提取单元,用于对当前隧道点云数据进行近地特征提取,得到多个近地特征;确定单元,用于将至少一个隧道附属物特征和多个近地特征,确定为当前隧道点云数据对应的多个点云特征。
24、在一种可行的实施方式中,第一特征提取单元具体用于:对当前隧道点云数据进行地面点过滤,得到多个非地面点;对多个非地面点进行隧道附属物边缘点提取,得到多个隧道附属物边缘点;根据多个隧道附属物边缘点生成至少一个隧道附属物特征。
25、在一种可行的实施方式中,第二特征提取单元具体用于:对当前隧道点云数据进行近地特征提取,得到路沿特征、地面特征、路面标示线特征;将路沿特征、地面特征和路面标示线特征组合为多个近地特征。
26、在一种可行的实施方式中,匹配模块包括:运动补偿单元,用于获取当前车辆速度,并根据当前车辆速度对多个点云特征中每个点云特征进行运动补偿,得到多个补偿后的点云特征;局部地图单元,用于根据初始车辆位姿信息和预置的点云特征地图,生成局部点云特征地图;第一匹配单元,用于将多个补偿后的点云特征和局部点云特征地图进行匹配,得到总匹配误差;第一优化单元,用于根据总匹配误差对初始车辆位姿信息进行优化,得到目标车辆位姿信息。
27、在一种可行的实施方式中,第一优化单元具体用于对总匹配误差进行解析,得到多个特征点的匹配误差;根据每个特征点的匹配误差对初始车辆位姿信息进行约束,得到目标车辆位姿信息:
28、在一种可行的实施方式中,第一优化单元具体用于根据每个隧道附属物特征点的匹配误差和每个路面标示线点的匹配误差对初始车辆位姿信息进行纵向位置约束和横向位置约束,得到第一车辆位姿信息;根据每个路沿特征点的匹配误差对第一车辆位姿信息进行横向位置约束和偏航角约束,得到第二车辆位姿信息;根据每个地面点的匹配误差对第二车辆位姿信息进行高度位置约束、俯仰角约束和翻滚角约束,得到目标车辆位姿信息。
29、在一种可行的实施方式中,匹配模块包括:第二匹配单元,用于根据每个点云特征对应的匹配策略,将多个点云特征中每个特征点与预置的点云特征地图进行匹配,并计算每个特征点的匹配误差,得到总匹配误差;平滑位姿单元,用于根据总匹配误差对初始车辆位姿信息进行优化,得到平滑车辆位姿信息;第二优化单元,用于根据平滑车辆位姿信息进行匹配迭代,直至满足迭代终止条件,得到目标车辆位姿信息。
30、在一种可行的实施方式中,第二匹配单元具体用于:根据点面匹配策略计算多个点云特征中每个地面点与预置的点云特征地图中多个匹配点所在平面的距离,得到第一匹配误差;根据点线匹配策略计算多个点云特征中其他特征的每个特征点与点云特征地图中两个最近匹配点所在直线的距离,得到第二匹配误差,其他特征包括隧道附属物特征、路面标示线特征和路沿特征;将第一匹配误差和第二匹配误差进行运算,得到总匹配误差。
31、在一种可行的实施方式中,第二匹配单元在根据点面匹配策略计算多个点云特征中每个地面点与预置的点云特征地图中多个匹配点所在平面的距离,得到第一匹配误差之后,还可以用于根据点点匹配策略计算多个点云特征中其他特征的每个特征点与点云特征地图中各个匹配点的距离,并将最小距离确定为第三匹配误差;将第一匹配误差、第三匹配误差进行运算,得到总匹配误差。
32、在一种可行的实施方式中,第二匹配单元在根据点面匹配策略计算多个点云特征中每个地面点与预置的点云特征地图中多个匹配点所在平面的距离,得到第一匹配误差之后,还可以用于根据点点匹配策略和预置的第一距离范围确定多个点云特征中其他特征的每个特征点在点云特征地图中对应的多个匹配点;计算每个特征点与多个匹配点的距离均值,并将距离均值确定为第四匹配误差;将第一匹配误差、第四匹配误差进行运算,得到总匹配误差。
33、在一种可行的实施方式中,车辆位姿信息处理装置还包括第二获取模块,用于获取多个传感器检测数据,多个传感器检测数据至少包括惯性测量单元检测数据和轮速计检测数据;融合模块,用于将多个传感器检测数据进行融合,得到融合车辆位姿信息;定位模块,用于根据融合车辆位姿信息和预置的扩展卡尔曼滤波算法,对目标车辆位姿信息进行优化,得到定位结果。
34、在一种可行的实施方式中,车辆位姿信息处理装置还包括地图更新模块,用于获取当前工作模式,当前工作模式为在线模式或离线模式;在当前工作模式为离线模式时,根据定位结果和多个点云特征对点云特征地图进行全局优化,得到优化后的点云特征地图。
35、本发明第三方面提供了一种车辆位姿信息处理设备,包括:存储器和至少一个处理器,存储器中存储有指令;至少一个处理器调用存储器中的指令,以使得车辆位姿信息处理设备执行上述的车辆位姿信息处理方法。
36、本发明的第四方面提供了一种计算机可读存储介质,计算机可读存储介5质中存储有指令,当其在计算机上运行时,使得计算机执行上述的车辆位姿信息处理方法。
37、本发明提供的技术方案中,获取车辆当前隧道点云数据和传感器检测数据;对当前隧道点云数据进行点云特征提取,得到多个点云特征,多个点云
38、特征至少包括隧道附属物特征;根据传感器检测数据进行计算,得到初始车0辆位姿信息;根据多个点云特征、初始车辆位姿信息和预置的点云特征地图进行匹配,得到目标车辆位姿信息。本发明实施例中,提取隧道场景中有效的点云特征,进行车辆位姿信息处理,降低隧道中车辆位姿信息处理对轮速计的依赖,实现隧道场景中全程可靠精确定位,也不需要引入额外的辅助设备,降低了隧道场景中确定车辆位姿信息成本。
39、
- 还没有人留言评论。精彩留言会获得点赞!