空速估算方法、装置、设备及计算机可读存储介质与流程
本技术涉及计算机,具体涉及一种空速估算方法、装置、设备及计算机可读存储介质。
背景技术:
1、随着飞行汽车概念的提出,汽车行业已在飞行汽车上投入研发,在研发阶段,飞行汽车的安全性问题备受关注。就飞行汽车而言,其包含机体结构部件,这些机体结构部件的劳损和抗风能力与飞行速度息息相关,因此,为了提高飞行汽车的安全性,需要估算飞行汽车的飞行速度。相关技术在计算飞行汽车的飞行速度时,通过空速管来测量气流压力数据,并边根据气流压力数据来计算飞行速度。
2、然而,相关技术在在通过空速管的气压数据来计算飞行速度时,气流的不稳定容易干扰空速管对气压的感知能力,影响了气压数据的可靠性,从而,导致计算的飞行速度不准确,降低可飞行汽车的安全性。
技术实现思路
1、本技术实施例提供一种空速估算方法、装置、设备及计算机可读存储介质,可准确估算飞行汽车的空速,提高飞行汽车的安全性。
2、本技术实施例提供一种空速估算方法,包括:
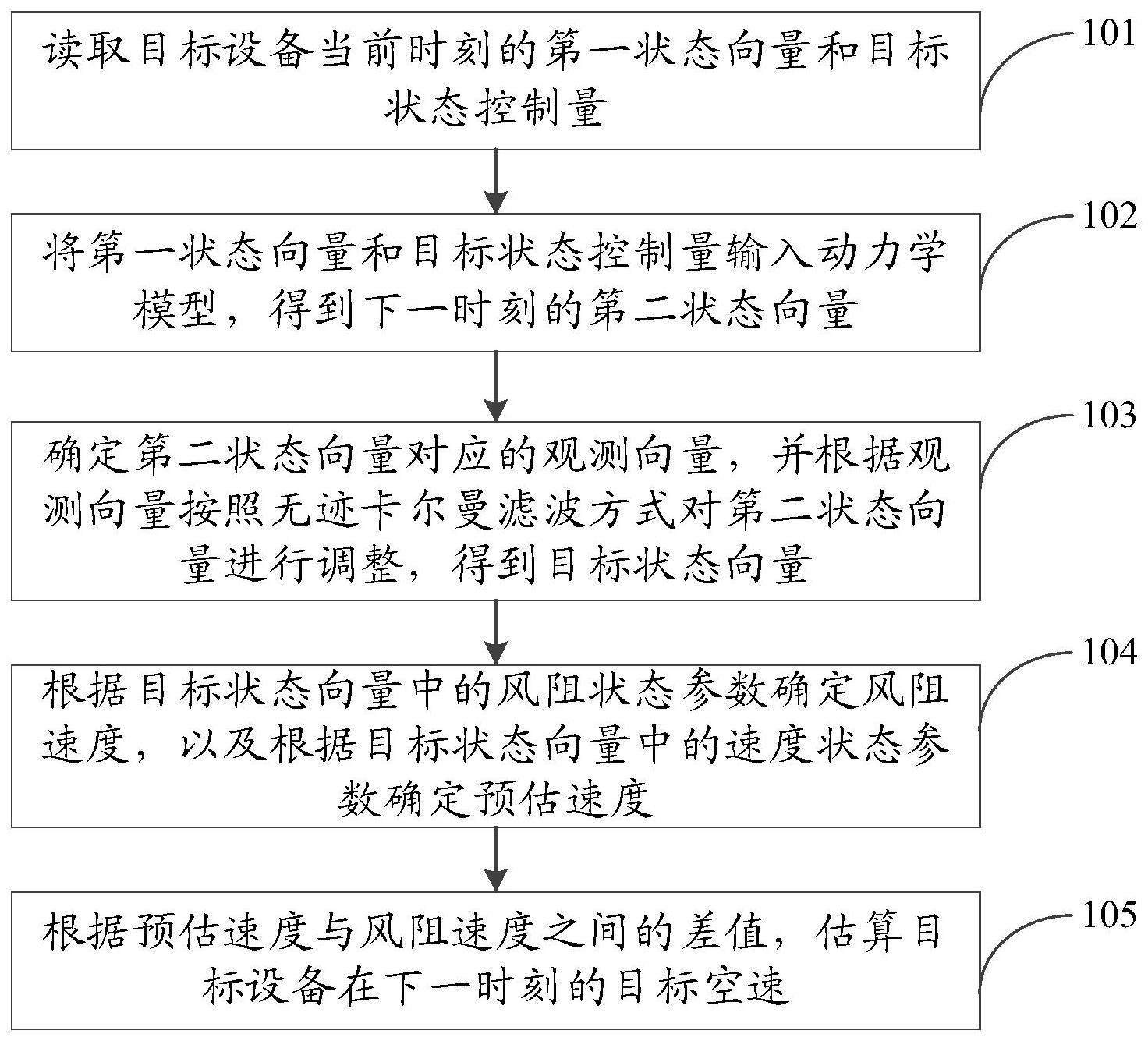
3、读取所述目标设备当前时刻的第一状态向量和目标状态控制量;
4、将所述第一状态向量和目标状态控制量输入动力学模型,得到下一时刻的第二状态向量,所述动力学模型由目标设备的状态向量与状态控制量之间的非线性关系构建得到;
5、确定所述第二状态向量对应的观测向量,并根据所述观测向量按照无迹卡尔曼滤波方式对所述第二状态向量进行调整,得到目标状态向量;
6、根据所述目标状态向量中的风阻状态参数确定风阻速度,以及根据所述目标状态向量中的速度状态参数确定预估速度;
7、根据所述预估速度与所述风阻速度之间的差值,估算所述目标设备在下一时刻的目标空速。
8、相应的,本技术实施例提供一种空速估算装置,包括:
9、读取单元,用于读取所述目标设备当前时刻的第一状态向量和目标状态控制量;
10、输入单元,用于将所述第一状态向量和目标状态控制量输入动力学模型,得到下一时刻的第二状态向量,所述动力学模型由目标设备的状态向量与状态控制量之间的非线性关系构建得到;
11、调整单元,用于确定所述第二状态向量对应的观测向量,并根据所述观测向量按照无迹卡尔曼滤波方式对所述第二状态向量进行调整,得到目标状态向量;
12、确定单元,用于根据所述目标状态向量中的风阻状态参数确定风阻速度,以及根据所述目标状态向量中的速度状态参数确定预估速度;
13、估算单元,用于根据所述预估速度与所述风阻速度之间的差值,估算所述目标设备在下一时刻的目标空速。
14、在一些实施例中,所述空速估算装置还包括构建单元,用于:
15、获取所述目标设备在历史时刻的运动数据;
16、基于所述运动数据,生成所述目标设备在历史时刻关联的状态向量和状态控制量,所述状态向量与所述状态控制量之间具有非线性对应关系;
17、基于所述状态向量与所述状态控制量之间的非线性对应关系,构建动力学模型。
18、在一些实施例中,所述构建单元,还用于:
19、从所述运动数据中提取所述目标设备在历史时刻的推力系数、风阻系数和速度;
20、按照三维空间关系,分别将所述推力系数、风阻系数和速度进行多个方向上的分解,得到所述目标设备在每个方向上的推力子系数、风阻子系数和方向速度;
21、根据所述推力子系数确定所述目标设备对应的姿态角,并按照欧拉角变换关系确定每个方向上的姿态角对应的角速率;
22、根据每个方向上的姿态角、方向速度和风阻子系数构建所述目标设备在历史时刻的状态向量;
23、读取所述风阻子系数在对应方向上关联的风力子系数,根据所述角速率、风力子系数和推力子系数构建所述目标设备在历史时刻的状态控制量。
24、在一些实施例中,所述调整单元,还用于:
25、基于无迹变换,获取所述第二状态向量对应的多个关键点,并根据所述目标状态控制量和每一关键点的状态量计算每一关键点对应的预测状态量;
26、根据所述预测状态量,按照状态概率分布关系计算多个关键点的状态方差;
27、根据所述观测向量确定每一预测状态量对应的目标观测值,并按照状态概率分布关系计算多个所述目标观测值之间的观测值方差;
28、根据所述状态方差与所述观测值方差之间的差异调整所述第二状态向量,得到目标状态向量。
29、在一些实施方式中,所述调整单元,还用于:
30、对所述第二状态向量进行非线性变换,得到所述第二状态数的高斯分布曲线;
31、以下一时刻作为状态中点,在所述高斯分布曲线上对称选取关键点,得到所述第二状态向量对应的多个关键点,每一关键点对应一个状态量。在一些实施例中,所述调整单元,还用于:
32、对多个所述预测状态量进行加权求和,得到所述多个关键点对应的状态均值;
33、确定每一预测状态量与所述状态均值之间的状态差值;
34、按照状态概率分布关系,计算多个所述状态差值对应的状态方差。
35、在一些实施例中,所述调整单元,还用于:
36、按照状态概率分布关系,计算所述状态方差与所述观测值方差之间的协方差;
37、根据所述协方差与所述观测值方差之间比值,确定增益系数;
38、根据所述增益系数对所述第二状态向量进行调整,得到调整后的目标状态向量。
39、此外,本技术实施例还提供一种计算机设备,包括处理器和存储器,存储器存储有计算机程序,处理器用于运行存储器内的计算机程序实现本技术实施例提供的空速估算方法中的步骤。
40、此外,本技术实施例还提供一种计算机可读存储介质,计算机可读存储介质存储有多条指令,指令适于处理器进行加载,以执行本技术实施例所提供的任一种空速估算方法中的步骤。
41、此外,本技术实施例还提供一种计算机程序产品,计算机程序产品包括计算机指令,计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行本技术实施例所提供的任一种空速估算方法中的步骤。
42、本技术实施例可以读取目标设备当前时刻的第一状态向量和目标状态控制量;将第一状态向量和目标状态控制量输入动力学模型,得到下一时刻的第二状态向量,动力学模型由目标设备的状态向量与状态控制量之间的非线性关系构建得到;确定第二状态向量对应的观测向量,并根据观测向量按照无迹卡尔曼滤波方式对第二状态向量进行调整,得到目标状态向量;根据目标状态向量中的风阻状态参数确定风阻速度,以及根据目标状态向量中的速度状态参数确定预估速度;根据预估速度与风阻速度之间的差值,估算目标设备在下一时刻的目标空速。由此可得,本方案可先确定目标设备在当前时刻的状态和输入系统的控制量,并通过预先构建的动力学模型结合当前的状态和控制量进行下一时刻的状态的非线性预测,得到目标设备在下一时刻的第二状态,然后,通过观测的向量对第二状态进行调整,最后,按照调整得到的目标状态来确定对应的风阻速度和目标设备的预估速度,并以预估速度与风阻速度之间的差值作为目标设备在下一时刻的空速;以此,通过迭代方式,根据目标设备当前时刻的状态自适应计算下一时刻状态,以便计算目标设备的空速,可准确估算飞行汽车的空速,提高飞行汽车的安全性。
- 还没有人留言评论。精彩留言会获得点赞!