一种基于巡检机器人的实时机柜U位占用情况检测方法与流程
一种基于巡检机器人的实时机柜u位占用情况检测方法
技术领域
1.本发明涉及人工智能和工业巡检领域,尤其涉及一种基于巡检机器人的实时机柜u位占用情况检测方法。
背景技术:
2.数据中心机房巡检管理检查包括:1.巡检期间,进行状态检查,若发现问题,如计算机机房物理环境异常、设备状态异常、网络或应用系统故障,应立即按操作规程执行进行恢复操作。(1)电源、ups:检查机房供电状况,ups工作情况、指示状态。(2)服务器:检查服务器是否当机,服务器(磁盘阵列)硬盘灯指示是否正常。(3)机房环境:检查机房空调工作状态,机房温度。(4)网络设备:检查网络设备,包括交换机、路由器、防火墙等及其属设备。检查设备工作状态。(5)网络通道:检查内外网络通道状态,包括公司内部局域网、公司与internet、公司至各合作单位的网络通道状态。(6)电话通道:检查电话系统通信及手机通信是否畅通。(7)sql server2005数据库:检查信息系统数据库服务是否正常。2.如果故障按恢复规程无法有效恢复,特别是当发生机房环境(动力、空调)故障、关键的设备、网络、系统、服务如无法及时恢复时,应立即通知总经理等相关领导,由相关领导协调资源进行故障处理。3.故障处理过程必须在机房日常巡检表的备注栏中详细记录,以备查阅。
3.数据中心的管理和巡查目前对于数据中心的管理和巡查,一般都是人工巡查,大型机房的机柜少则上百,多则上千,每个机柜u位在20-50左右不等,若要实时掌握每个机柜的u位占用率,依靠人工盘点,费时费力,效率极低,目前有些盘点方法需要在机柜内进行安装类似传感器的设备,这种方法需要对每个机柜进行改造,改造的难度和成本较高。
技术实现要素:
4.为了解决以上技术问题,本发明提供了一种基于巡检机器人的实时机柜u位占用情况检测方法,无需对现场改造,同时也能实现实时高效的u位检测。
5.本发明的技术方案是:
6.一种基于巡检机器人的实时机柜u位占用情况检测方法,
7.使用提前预训练好的机柜u位分割模型,对巡检机器人采集的整机柜图像进行u位分割,分割为两类:占用和未占用;最后根据分割区域的相对位置和宽度,确定机柜u位占用的位置和个数;
8.进一步的,
9.该方法涉及三个方面:分割模型预训练;机柜u位分割检测服务;巡检阶段。
10.再进一步的,
11.分割模型预训练:使用巡检机器人在数据中心现场采集机柜图像,人工标注机柜中占用和未占用的u位,使用人工标注的机柜图像数据集训练语义分割模型m。
12.机柜u位分割检测服务:调用语义分割模型m对机柜图像进行语义分割,得到语义分割结果;对语义分割结果进行处理计算得到机柜u位占用的位置和个数。该服务返回的是
检测到的占用和未占用u位的多边形区域及对应区域u位的个数。
13.巡检阶段:
14.巡检机器人到达指定任务点,拍摄当前任务点整机柜图像;
15.调用机柜u位分割检测服务,为该服务传入整机柜图像及单u位所占图像像素高度。
16.再进一步的,
17.机柜u位分割检测服务根据传入的参数计算并返回该机柜占用和未占用u位的多边形区域及对应区域u位的个数;
18.前端根据多边形区域的坐标位置、所属类别及u位个数整体显示机柜的u位占用情况。
附图说明
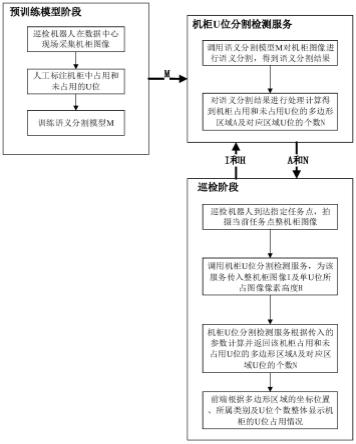
19.图1为u位占用检测流程图。
具体实施方式
20.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.本发明提出一种基于巡检机器人的实时机柜u位占用情况检测方法,主要使用提前预训练好的机柜u位分割模型,对巡检机器人采集的整机柜图像进行u位分割,分割为两类:占用和未占用。最后根据分割区域的相对位置和宽度,确定机柜u位占用的位置和个数。
22.发明涉及三个方面:
23.1、分割模型预训练:使用巡检机器人在数据中心现场采集机柜图像,人工标注机柜中占用和未占用的u位,使用人工标注的机柜图像数据集训练语义分割模型m;
24.2、机柜u位分割检测服务:调用语义分割模型m对机柜图像进行语义分割,得到语义分割结果;对语义分割结果进行处理计算得到机柜u位占用的位置和个数;该服务返回的是检测到的占用和未占用u位的多边形区域及对应区域u位的个数;
25.3、巡检阶段:巡检机器人到达指定任务点,拍摄当前任务点整机柜图像;调用机柜u位分割检测服务,为该服务传入整机柜图像及单u位所占图像像素高度;机柜u位分割检测服务根据传入的参数计算并返回该机柜占用和未占用u位的多边形区域及对应区域u位的个数;前端根据多边形区域的坐标位置、所属类别及u位个数整体显示机柜的u位占用情况。
26.以上所述仅为本发明的较佳实施例,仅用于说明本发明的技术方案,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所做的任何修改、等同替换、改进等,均包含在本发明的保护范围内。
技术特征:
1.一种基于巡检机器人的实时机柜u位占用情况检测方法,其特征在于,使用提前预训练好的机柜u位分割模型,对巡检机器人采集的整机柜图像进行u位分割,分割为两类:占用和未占用;最后根据分割区域的相对位置和宽度,确定机柜u位占用的位置和个数。2.根据权利要求1所述的方法,其特征在于,该方法涉及三个方面:分割模型预训练;机柜u位分割检测服务;巡检阶段。3.根据权利要求2所述的方法,其特征在于,分割模型预训练:使用巡检机器人在数据中心现场采集机柜图像,人工标注机柜中占用和未占用的u位,使用人工标注的机柜图像数据集训练语义分割模型m。4.根据权利要求3所述的方法,其特征在于,机柜u位分割检测服务:调用语义分割模型m对机柜图像进行语义分割,得到语义分割结果;对语义分割结果进行处理计算得到机柜u位占用的位置和个数。5.根据权利要求4所述的方法,其特征在于,该服务返回的是检测到的占用和未占用u位的多边形区域及对应区域u位的个数。6.根据权利要求5所述的方法,其特征在于,巡检阶段:巡检机器人到达指定任务点,拍摄当前任务点整机柜图像。7.根据权利要求6所述的方法,其特征在于,调用机柜u位分割检测服务,为该服务传入整机柜图像及单u位所占图像像素高度。8.根据权利要求7所述的方法,其特征在于,机柜u位分割检测服务根据传入的参数计算并返回该机柜占用和未占用u位的多边形区域及对应区域u位的个数;前端根据多边形区域的坐标位置、所属类别及u位个数整体显示机柜的u位占用情况。
技术总结
本发明提供一种基于巡检机器人的实时机柜U位占用情况检测方法,属于人工智能和工业巡检领域,本发明主要使用提前预训练好的机柜U位分割模型,对巡检机器人采集的整机柜图像进行U位分割,分割为两类:占用和未占用。最后根据分割区域的相对位置和宽度,确定机柜U位占用的位置和个数。占用的位置和个数。占用的位置和个数。
技术研发人员:郝虹 高岩
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:2022.12.22
技术公布日:2023/3/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1