一种基于定位的相机标定效果验证方法、系统及存储介质与流程
1.本发明涉及相机标定效果技术领域,尤其是涉及一种基于定位的相机标定效果验证方法、系统及存储介质。
背景技术:
2.在自动驾驶车辆对于相机传感器的使用是不可或缺的,使用相机就需要建立物体从三维世界到像平面上各坐标点的对应关系。相机的标定工作所得到的内参矩阵、畸变矩阵以及外参矩阵就是上述的对应关系。在得到这一组关系后,它的实际效果如何,又如何快速验证。
3.现有技术中,在通过将自动驾驶车辆停在固定位置去验证固定位置的目标点,通过量取目标点到车辆坐标系的各个方向的平移量与感知系统输出的平移量做对比,两者差值大于某一经验值则认为标定结果不合格,否则合格,需要将车辆固定在某一固定的位置(例如90
°
等),这个条件比较苛刻,停放车辆一般都会存在人工误差,对验证结果有一定的影响,验证结果时往往确保车辆与目标物处于同一水平面,减小旋转方向的误差,只验证水平方向的结果。
技术实现要素:
4.鉴于以上现有技术的不足,本发明提供了一种基于定位的相机标定效果验证方法、系统及存储介质,不仅解决结果验证时,对车辆姿态的约束苛刻的问题,而且解决结果验证时,对车辆要求与目标物处于同一水平面的苛刻要求。
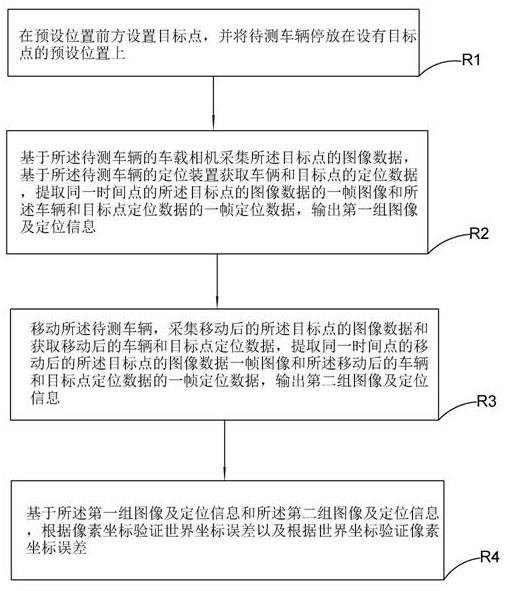
5.为了实现上述目的及其他相关目的,本发明提供的技术方案如下:一种基于定位的相机标定效果验证方法,所述方法包括:r1:在预设位置前方设置目标点,并将待测车辆停放在设有目标点的预设位置上;r2:基于所述待测车辆的车载相机采集所述目标点的图像数据,基于所述待测车辆的定位装置获取车辆和目标点的定位数据,提取同一时间点的所述目标点的图像数据的一帧图像和所述车辆和目标点定位数据的一帧定位数据,输出第一组图像及定位信息;r3:移动所述待测车辆,采集移动后的所述目标点的图像数据和获取移动后的车辆和目标点定位数据,提取同一时间点的移动后的所述目标点的图像数据一帧图像和所述移动后的车辆和目标点定位数据的一帧定位数据,输出第二组图像及定位信息;r4:基于所述第一组图像及定位信息和所述第二组图像及定位信息,根据像素坐标验证世界坐标误差以及根据世界坐标验证像素坐标误差。
6.进一步的,在步骤r4中,所述根据像素坐标验证世界坐标误差包括:r411:基于所述第一组图像及定位信息和所述第二组图像及定位信息,将图像中的目标点的像素坐标提取出来;r412:将所述目标点的像素坐标代入相机参数,输出与之对应的世界坐标;r413:根据车辆定位数据信息和目标点的经纬度信息,得到参考世界坐标;
r414:将步骤r412求得的世界坐标与步骤r413求得的世界坐标做差值。
7.进一步的,所述车辆定位数据信息包括经纬度和航向角。
8.进一步的,在步骤r4中,所述根据世界坐标验证像素坐标误差包括:r421:基于所述第一组图像及定位信息和所述第二组图像及定位信息,根据车辆定位信息以及目标点的经纬度信息,得到参考世界坐标;r422:将所述参考世界坐标代入相机参数,得到与之对应的像素坐标;r423:将图像中的目标点的像素坐标提取出来,并将这组像素坐标作为真值;r424:将步骤r422得到的像素坐标与步骤r423得到的像素坐标做差值。
9.进一步的,根据像素坐标验证世界坐标误差,得到一组差值,对这组差值进行评价,设置预设标定误差值,若这组差值大于标定误差值,则认为相机标定结果误差偏大。
10.进一步的,根据世界坐标验证像素坐标误差,得到一组差值,计算这组差值的方差,设置预设方差值,若这组差值的方差值小于预设方差值,则认为相机标定结果不稳定。进一步的,将所述车辆定位数据信息和目标点的经纬度信息转化为高斯坐标,目标点和车辆将在同一个坐标系下,再根据车辆的航向信息得道在车辆坐标系下目标点的坐标,这组坐标为所述参考世界坐标。
11.为了实现上述目的及其他相关目的,本发明还提供了一种基于定位的相机标定效果验证系统,包括计算机设备,该计算机设备被编程或配置以执行任意一项所述基于定位的相机标定效果验证方法的步骤。
12.为了实现上述目的及其他相关目的,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有被编程或配置以执行任意一项所述基于定位的相机标定效果验证方法的计算机程序。
13.本发明具有以下积极效果:1.本发明通过定位信息简化了世界坐标获取的难度,解决结果验证时,对车辆姿态的约束苛刻的问题。
14.2.本发明通过量化的差值数据可以对标定效果进行有标准的评判,解决结果验证时,对车辆要求与目标物处于同一水平面的苛刻要求。
15.3.本发明验证过程简便,能够快速进行验证,降低验证成本,从而提高了相机标定效果的准确度。
附图说明
16.图1为本发明方法流程示意图;图2为本发明车辆与目标点位置示意图;图3为本发明根据像素坐标验证世界坐标误差流程示意图;图4为本发明根据世界坐标验证像素坐标误差流程示意图。
具体实施方式
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可
以根据这些附图获得其它的附图。
18.实施例1:如图1或图2所示,一种基于定位的相机标定效果验证方法,所述方法包括:r1:在预设位置前方设置目标点,并将待测车辆停放在设有目标点的预设位置上;r2:基于所述待测车辆的车载相机采集所述目标点的图像数据,基于所述待测车辆的定位装置获取车辆和目标点的定位数据,提取同一时间点的所述目标点的图像数据的一帧图像和所述车辆和目标点定位数据的一帧定位数据,输出第一组图像及定位信息;r3:移动所述待测车辆,采集移动后的所述目标点的图像数据和获取移动后的车辆和目标点定位数据,提取同一时间点的移动后的所述目标点的图像数据一帧图像和所述移动后的车辆和目标点定位数据的一帧定位数据,输出第二组图像及定位信息;r4:基于所述第一组图像及定位信息和所述第二组图像及定位信息,根据像素坐标验证世界坐标误差以及根据世界坐标验证像素坐标误差。
19.在本实施例中,如图3所示,在步骤r4中,所述根据像素坐标验证世界坐标误差包括:r411:基于所述第一组图像及定位信息和所述第二组图像及定位信息,将图像中的目标点的像素坐标提取出来;r412:将所述目标点的像素坐标代入相机参数,输出与之对应的世界坐标;r413:根据车辆定位数据信息和目标点的经纬度信息,得到参考世界坐标;r414:将步骤r412求得的世界坐标与步骤r413求得的世界坐标做差值。
20.在本实施例中,所述车辆定位数据信息包括经纬度和航向角。
21.在本实施例中,如图4所示,在步骤r4中,所述根据世界坐标验证像素坐标误差包括:r421:基于所述第一组图像及定位信息和所述第二组图像及定位信息,根据车辆定位信息以及目标点的经纬度信息,得到参考世界坐标;r422:将所述参考世界坐标代入相机参数,得到与之对应的像素坐标;r423:将图像中的目标点的像素坐标提取出来,并将这组像素坐标作为真值;r424:将步骤r422得到的像素坐标与步骤r423得到的像素坐标做差值。
22.在本实施例中,根据像素坐标验证世界坐标误差,得到一组差值,对这组差值进行评价,设置预设标定误差值,若这组差值大于标定误差值,则认为相机标定结果误差偏大。
23.在本实施例中,根据世界坐标验证像素坐标误差,得到一组差值,计算这组差值的方差,设置预设方差值,若这组差值的方差值小于预设方差值,则认为相机标定结果不稳定。
24.在本实施例中,将所述车辆定位数据信息和目标点的经纬度信息转化为高斯坐标,目标点和车辆将在同一个坐标系下,再根据车辆的航向信息得道在车辆坐标系下目标点的坐标,这组坐标为所述参考世界坐标。
25.为了实现上述目的及其他相关目的,本发明还提供了一种基于定位的相机标定效果验证系统,包括计算机设备,该计算机设备被编程或配置以执行任意一项所述基于定位的相机标定效果验证方法的步骤。
26.为了实现上述目的及其他相关目的,本发明还提供了一种计算机可读存储介质,
该计算机可读存储介质上存储有被编程或配置以执行任意一项所述基于定位的相机标定效果验证方法的计算机程序。
27.实施例2:在实施例1的一种基于定位的相机标定效果验证方法、系统及存储介质的基础上,下面对本发明作进一步的说明。
28.本发明软件环境为ros作为通信中间件为提供方案所需的车辆传感器数据,具体为包含车辆经纬度信息和航向的定位信息,以及需要标定的相机的原始数据信息,通过的qt实现gui界面,落实方面的整体流程,包含获取目标的在图像中的像素坐标。
29.将相机数据类型转化为qt图片类型(借助cv_bridge实现ros格式转化opencv格式,再由opencv转化为qimage格式),并传到qt的laber控件上实时显示形成视频。
30.1)对相机话题和定位话题进行时间同步,当时间同步后运行用户采集数据;点击按钮,采集数据。
31.2)切换界面,将采集的图像数据显示到该像素坐标采集窗口。像素坐标采集窗口主要通过qt的鼠标事件和qt label空间显示图片实现,具体为将采集的图片显示到窗口的label控件上,将label坐标设置到左上角使得窗口坐标与label控件坐标原点相同,label大小设置为图像大小,窗口添加滚动条控件,以满足图片超过窗口大小的情况。
32.3)开始监听鼠标右键的点击活动,每当右键点击则返回当前鼠标在窗口的坐标,最终实现返回像素坐标。开始选择目标点的像素坐标,即通过鼠标右击目标点获取,该组像素坐标即为真值。上传相机标定参数结果。(一般以yaml文件的形式存储标定的参数,通过程序解析yaml,文件获得各参数矩阵,其他形式也可以。)将采集到的车辆经纬度信息和目标点的经纬度信息转化为高斯坐标,此时目标点将在同一个坐标系下,再根据车辆的航向信息可求得在车辆坐标系下目标点的坐标,这组坐标即为世界坐标的真值。将鼠标点击获得像素坐标与相机参数代入相应公式,求得一组世界坐标,将其与世界坐标真值做对比求得一组差值,对这组差值数据进行评价,例如如果改组中的最大值大于10cm,则认为标定误差偏大,或者对差值求平均值和方差,总之根据实际需求做评价。将通过定位数据求得的世界坐标的真值代入相应,求得一组像素坐标,将其与像素坐标真值作差,得到一组差值,对这组差值进行评价,方式同上。
33.综上所述,本发明不仅解决结果验证时,对车辆姿态的约束苛刻的问题,而且解决结果验证时,对车辆要求与目标物处于同一水平面的苛刻要求。
34.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1