基于重参数优化的异源遥感影像融合道路智能识别的方法
本发明涉及遥感影像图像处理,特别涉及一种基于重参数优化的异源遥感影像融合道路智能识别的方法。
背景技术:
1、提取道路网是一项具有挑战性的任务。中国的道路规模非常庞大,城市道路和乡村道路都非常复杂。道旁的树木和灌木丛等植被常常遮挡着道路,这使得想要准确高效地提取路网变得非常困难。另外,随着城市化的加速,城市里的道路也在不断发展和变化,这使得提取路网变得更加困难。不仅如此,提取道路网需要大量的数据和计算资源,并且需要先进的算法才能实现。在进行道路网提取时,还需要面对其他挑战。例如,道路可能会受到环境影响,例如天气、季节等因素,这会对提取道路网造成干扰。道路有时会因为事故、施工等原因而暂时关闭,这也会对提取道路网造成影响。此外,道路网提取还需要考虑到道路的质量问题。在提取道路网时,如果道路的质量不好,比如道路不平坦、不宽敞,那么提取出来的道路网也可能不准确,甚至会对交通安全造成威胁。因此,在提取道路网时,需要同时考虑到道路的质量问题,并确保提取出来的道路网是安全可靠的。
2、近年来,遥感技术已经广泛应用于路网提取。这种技术可以从高空或太空收集遥感数据,并使用特定的软件和算法来处理这些数据,以提取路网信息。这种方法可以快速、准确地提取路网信息,在许多领域都有广泛应用,如城市规划、交通管理、灾害应急等。此外,遥感技术不需要人员进行实地勘察,从而助于减少对环境的影响。遥感技术可以提供高分辨率的遥感影像包含道路、建筑物、地形等信息,有助于准确提取路网。另外,遥感技术还可以提供实时数据,有助于监测路网状况,并及时采取应对措施。其中,合成孔径雷达(synthetic aperture radar,sar)是一种能够在黑暗和天气恶劣的情况下提供高分辨率遥感影像的技术。它通过在遥感探测器运动过程中记录多个雷达回波信号,并利用后期数字处理技术来模拟一个较大的探测器孔径,从而获得比实际探测器孔径更大的分辨率。因此,合成孔径雷达技术在遥感影像的道路提取方面有着广泛的应用。它可以提供更为精细和准确的道路轮廓信息,有助于遥感影像中道路的快速和准确提取。此外,由于合成孔径雷达技术的高分辨率,它还能够提供更多的细节信息,有助于进一步识别道路的类型、状况以及周边环境。
3、深度学习是一种机器学习技术,它通过设计多层神经网络来模拟人脑的学习过程,能够在大量数据的指导下自动学习和提取特征。在遥感影像的路网提取方面,深度学习可以通过训练大量遥感影像数据来学习路网的特征,从而自动提取路网信息。由于深度学习能够自动学习特征,它可以在遥感影像的多种条件下有效提取路网信息,包括不同地区、不同光照条件和不同遥感传感器等。此外,深度学习还具有极高的提取精度和更快的提取速度。通过优化网络结构和超参数设置,深度学习模型可以达到更高的准确率,从而提高路网提取的精度。进一步的,深度学习模型在训练好后可以直接部署到边缘设备上,具有较高的实时性能,能够满足实时路网提取的需求。采用深度学习从遥感影像中提取路网信息是一种高效且有前景的方法。
4、综上所述,当前随着高分辨率遥感影像与合成孔径雷达影像的数据持续获取,会有大量的数据冗余现象,因此急需一种自动化高精度的算法融合异源遥感影像特征,提取城市与乡村道路。
技术实现思路
1、本发明针对现有技术的缺陷,提供了一种基于重参数优化的异源遥感影像融合道路智能识别的方法,其目的在于:构建一种融合光学影像与sar影像,且能够高效部署,高精度的路网提取模型。
2、为了实现以上发明目的,本发明采取的技术方案如下:
3、一种基于重参数优化的异源遥感影像融合道路智能识别的方法,包括以下步骤:
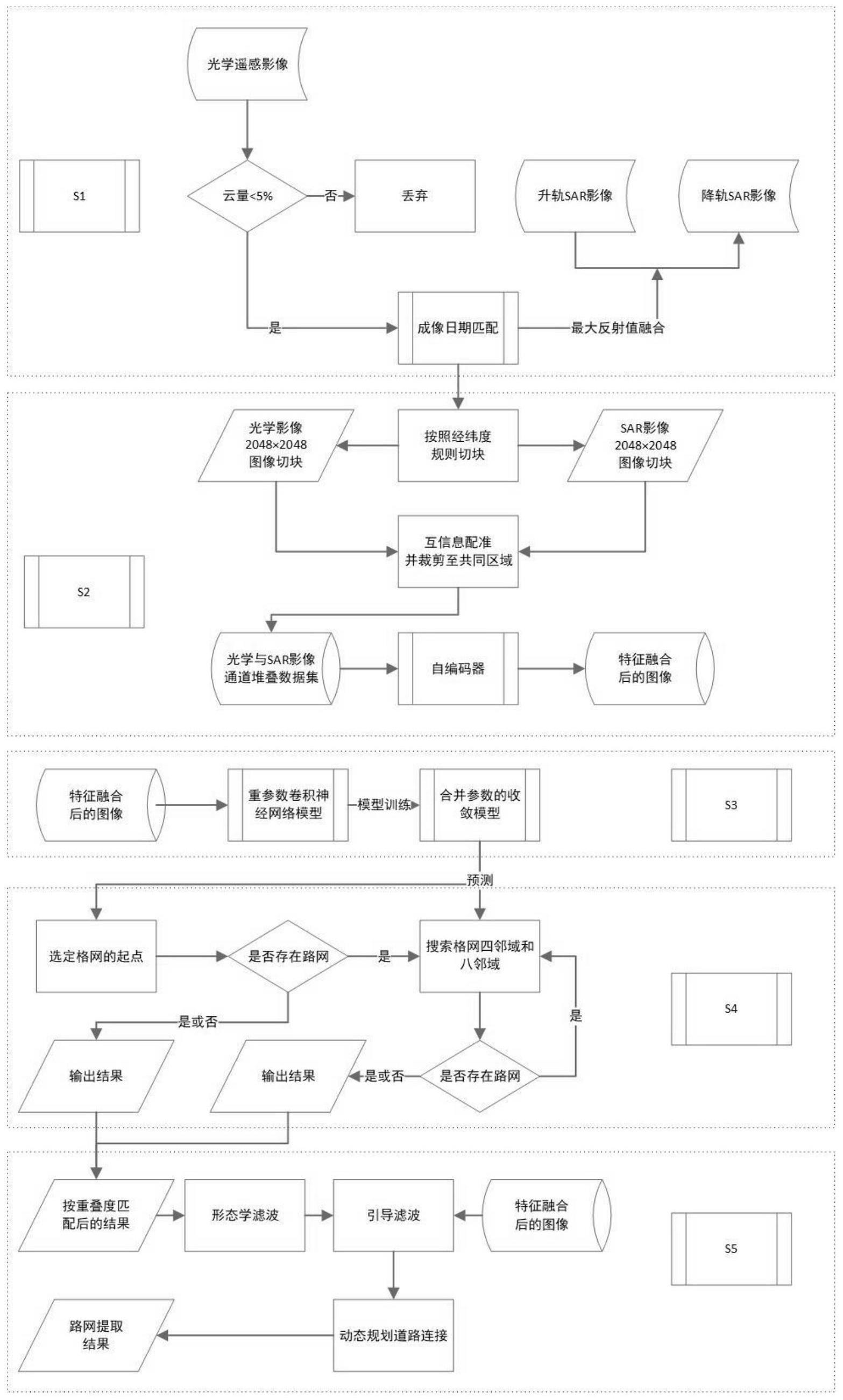
4、步骤s1:收集高分辨率遥感影像以车站为重点区域构建标注样本,从而生成适用于模型训练和验证的影像切块;
5、步骤s2:基于卷积神经网络本身具有的强大特征提取与融合能力,构建自编码器采用多极化输入融合样本特征,这是一种效果优异的图像降维方法,能够显著的节省算力;
6、步骤s3:采用多gpu并行运算的方式,基于重参数化方法构建适用于大规模遥感道路提取的模型,并进行模型训练;
7、步骤s4:基于路网的特征构建一种缓冲区网格搜索方案,大幅度减少模型计算量,以道路的连续性为基础,通过邻域搜索的方式降低遥感影像中提取道路的困难性;
8、步骤s5:采用导向滤波算法,以图像本身的梯度引导提取的路网图,过滤非边缘噪声,并采用动态规划算法拼接道路。
9、进一步的,所述步骤s1的具体步骤为:
10、步骤s11:根据覆盖有路网的高分辨率光学卫星遥感影像,期间对光学影像的云量进行分析,过滤云量>5%的图像。
11、步骤s12:提取光学遥感影像的成像时间,并采用相邻日期的sar影像进行补充,以光学影像为主,sar影像进行拼接以及升降轨联合处理。
12、步骤s13:重采样两种影像至相同的分辨率,进而构建包含路网(城市以及乡村道路)的影像切块切片。
13、作为优选,步骤s1中由于模型采用了重参数化,为最大化算力并提升模型感受野,影像切块为2048×2048。
14、进一步的,所述步骤s2的具体步骤为:
15、步骤s21:采用卷积神经网络,根据输入输出为同一图像的条件,构建自编码器。
16、步骤s22:将光学遥感影像以及sar遥感影像采用通道拼接的方式合成一幅图像。
17、步骤s23:采用互信息法配准两种异源的遥感影像,并将图像采样至一致大小。
18、步骤s24:输入自编码器,以无监督的方式开展图像融合。
19、进一步的,所述步骤s3的具体步骤为:
20、步骤s31:部署4块显卡,使用pytorch并行的方式进行多卡连接;
21、步骤s32:采用重参数的方式才有多残差连接构建道路提取模型;
22、步骤s33:模型训练与验证,模型采用的误差函数由以下函数共同构成:
23、
24、
25、
26、式中m是图像的缩放比例,分别是融合的遥感影像与预测结果,分别代表融合遥感影像及预测结果的均值,分别代表了融合遥感影像与预测结果的方差,代表了融合遥感影像与预测结果之间的协方差,[βm,γm]是两个常数代表了均值与方差的重要性,[c1,c2]是两个值很小的常数因子,防止分母为零的情况出现;是融合遥感影像与预测结果一范数差距,是融合遥感影像与预测结果的结构相似性差距;代表了有监督训练时微调所采用的最终损失函数;
27、步骤s34:预测模型重参数化,将训练时候的分支合并至预测模型结构中,在不影响模型效果的情况下提升模型的速度以及减少模型对于算力的需求;预测时候模型重参数按照下述公式执行:
28、
29、
30、
31、
32、
33、式中,分别代表3×3卷积以及1×1卷积,其中c1是输入图像的通道数c2是输出图像的通道数;同样的μ(i),σ(i),γ(i),β(i)分别代表了对应卷积的均值、标准差、学习率以及偏置;bn是深度学习中常用了批标准化方法。
34、进一步的,所述步骤s4的具体步骤为:
35、步骤s41:建立格网搜索模型起点,指定该起点为根节点,并根据该节点的四邻域和八邻域进行搜索。
36、步骤s42:当四邻域和八邻域中检测出有路网的情况下,进一步生成四邻域和八邻域,如此重复迭代直至图像中所有路网均被提取。
37、进一步的,所述步骤s5的具体步骤为:
38、步骤s51:基于形态学闭运算方法进行形态学滤波,减少噪声对于结果的污染。
39、步骤s52:采用特征融合后的图像对提取结果进行导向滤波,过滤图像中存在的部分非边缘噪声。
40、步骤s53:采用动态规划算法构建道路连接。
41、作为优选,步骤s51中采用10×10算子进行形态学滤波。
42、与现有技术相比,本发明的优点在于:
43、1.联合了光学遥感影像以及sar影像,能够更好的识别遥感图像中所包含的道路信息。模型提取道路时,是根据路网特征对道路进行分割,因此即使正确分类的道路矢量仍然和标签之间存在有一定的差距。但整体而言,通过联合sar与光学遥感影像,即使是中分辨率的全局特征也能够减少草木遮挡等影响,假正例区域大幅度抑制,较单一的光学遥感道路提取更加完整。
44、2.本发明采用了重参数化方法进行训练和预测,这是一种新颖的、极其适用于大规模遥感数据处理的算法。该方法在训练过程中用大量的参数和分支实现多级多特征图像特征提取和融合,在预测的时候通过合并分支以及将批标准化与卷积合并的方式大幅度提升了模型的运算速率,减少了模型的计算量。
45、3.构建了一种高效的格网邻域搜索算法,通过观察道路属于线性目标,具有较强的连贯性,通过人工设定解算起点,按照四邻域以及八邻域的方式逐步遍历整幅影像中包含道路的部分。这种方法在高分遥感影像上甚至能够减少90%的计算量,有效的提升了模型的应用场景。
46、4.采用形态学滤波、引导滤波减少了道路提取时的噪声,并通过动态规划实现道路连接大幅度提升了全局的适用性。
- 还没有人留言评论。精彩留言会获得点赞!