一种用于多航天器追逃博弈任务的动态匹配方法
本发明涉及一种多航天器追逃博弈的任务匹配方法,尤其涉及一种考虑航天器状态变化的动态任务匹配方法,适用于躲避或追踪多颗卫星或空间碎片的任务,属于航空航天。
背景技术:
1、近年来,全球航天技术迅猛发展,航天发射频率持续提高,商业低轨卫星巨型星座开启井喷式发展浪潮,对航天器多对多追逃博弈的研究提出了迫切需求。目前,对于航天器追逃博弈问题的研究大多局限于一追一逃和多追一逃的范畴,鲜少涉及多追多逃问题。
2、现有的一追一逃问题多基于二人零和博弈模型来求解双方策略,有学者研究了椭圆轨道上侦察卫星和非合作目标之间的微分博弈问题和近地轨道的双航天器追逃问题,提出的主要算法有间接式启发算法、半直接控制参数化方法、基于多重打靶的混合算法和灵敏度法等。对于不完全信息下的轨道追逃博弈问题,针对博弈中的规避者,有学者提出了一种基于估计的最优策略和一种改进的在线参数估计算法。随着航天技术和追逃理论的不断发展,对航天器追逃博弈问题的研究逐渐向多追一逃和追逃防三方博弈拓展深化,应用的主要算法有间接启发算法、水平集法、分布式在线任务规划算法和集中式任务规划算法等。
3、随着航天技术不断发展,未来的航天器追逃博弈将呈现集群化、智能化及对抗化的特点,现有的轨道博弈形式难以满足实际的任务需求,有必要开展多对多航天器追逃博弈研究,这也是追逃理论深入发展的必然走向。此外,空间中遍布各个轨道的巨型星座、废弃航天器及其碎片严重挤占了地球轨道资源,严重威胁国家安全和整个人类的太空资源安全。为缓解太空资源紧张,保障航天器安全运行,有必要开展空间碎片清除任务,还需针对巨型星座可能实施的监视和拦截行为做出应对措施。对于空间碎片清除,通过一次发射任务释放多颗小卫星去清理多颗碎片的性价比较高;对于巨型星座实施的监视和拦截等行为,该场景往往涉及多个航天器。这是典型的军民两用任务,它们均涉及了多目标最优匹配与轨道优化问题,值得深入研究。为了使研究更具普适性,本发明将碎片和巨型星座均视为具有机动能力的非合作目标,转而研究多对多航天器追逃博弈问题,提出了一种有效解决多航天器任务匹配的方法。
技术实现思路
1、为了解决多航天器追逃博弈的任务分配问题,针对航天器状态会随着时间发生变化进而影响追逃策略,本发明的主要目的是提供一种用于多航天器追逃博弈任务的动态分配方法,基于航天器动力学模型,将多对多问题转化为若干个一对一子问题,进而求解追逃双方的最优控制策略,即本发明仅通过评估追逃双方航天器的机动能力、位置和速度信息,给定任务时间后,即能够给出追逃双方的动态匹配方案和最优控制策略,具有控制方法简单、计算量小、实时性强等特点。本发明能够保证追方航天器获得整体最优的追踪效果。
2、本发明的目的是通过下述技术方案实现的:
3、本发明公开的一种用于多航天器追逃博弈任务的动态匹配方法,包括如下步骤:
4、步骤一:建立简化追逃博弈模型涉及的相关坐标系,选择与追逃航天器距离较近的一点作为参考点,参考点沿kepler轨道围绕地球运行。以参考点为原点建立参考坐标系sxyz,sx轴由地心指向参考点,sy轴位于轨道平面内指向参考点运动方向,与sx轴垂直,sz轴满足右手定则。
5、从地球到参考点的距离远大于追逃双方的相对距离,采用下述方程来描述追逃航天器相对参考点的运动,形式如下:
6、
7、
8、
9、
10、
11、其中,下标k取e或p,分别表示逃逸器和追踪器;x为航天器的状态量,包含位置和速度信息,x,y,z表示航天器相对参考点的位置分量;u为航天器的控制量输入,ux,uy,uz表示相应的加速度分量;ω表示参考点的轨道角速度;a和b分别为状态量和控制量的系数矩阵。
12、步骤二:将追逃双方的机动能力、相对距离和相对速度量化为权重矩阵。
13、(1)构造判断矩阵:追逃双方的机动能力、相对距离和相对速度是追踪器选择追击目标时需要考虑的因素。将所述三个因素两两比较,根据表1所示的1-9标度方法来构造判断矩阵c=(cij)3×3。其中,cij表示因素i相对j的判断,cji=1/cij表示因素j相对i的判断;
14、表1 1-9标度方法
15、
16、(2)层次单排序:计算判断矩阵最大特征根λ的归一化特征向量w,其各元素表示各因素对于其他因素的相对重要性权值。
17、(3)一致性检测:定义一致性比率cr=ci/ri和一致性指标ci=(λ-n)/(n-1)。ri为随机一致性指标,其取值与因素个数n有关。当cr小于0.1时,判定判断矩阵的不一致程度在容许范围之内,检验通过,否则需重新构造判断矩阵,即重复步骤二(1)。
18、(4)建立因素权重:将追逃双方的机动能力、相对距离和相对速度转化为对应的权重值。
19、
20、
21、
22、其中,取值下标i,j为逃逸器和追踪器编号;μa,μd,μv分别为追逃双方机动能力、距离和相对速度的权重值;v为航天器速度;a为加速度幅值;r为追逃双方相对距离;d1和d2分别表示追逃双方的最近距离和最远距离,由双方位置信息得出;kd为距离计算系数,根据经验取值;kv为速度方向系数,当逃逸器数目少于追踪器时取0.25,其他情形取1。在公式(6)中,机动能力权重在0到1之间,若逃逸器的机动能力相对追踪器越强,则追踪难度越高,该权重值越接近0,公式(8)与此类似。公式(7)符合追踪器就近选择逃逸目标的原则,双方距离越近,距离权值越接近1。
23、(5)计算权重矩阵:根据逃逸器和追踪器的机动能力、相对距离和相对速度建立隶属度函数,权重矩阵的各元素tij计算方式如下:
24、
25、其中,μij为步骤(4)计算所得的因素权重矩阵。
26、由于在限定时间内,追逃双方的机动能力、相对距离和相对速度大小均能够影响最终的追逃效果,需要比较三个因素的重要程度。由于航天器均采用小推力方式进行机动,在给定时间内速度的改变较小,判定机动能力的重要程度最弱。至此,至于剩下两个因素中哪一个更重要,给定追逃航天器的数目和状态信息,按照相对速度、相对距离、机动能力和相对距离、相对速度、机动能力两种重要性序列分别生成权重矩阵和匹配方案,对比追逃结果的优劣。结果显示,三个因素的重要性由高到低排序为:相对速度、相对距离、机动能力,由此可产生6种不同的符合条件的判断矩阵,本发明根据其在实例中的应用结果来选取最优的判断矩阵。
27、步骤三:基于步骤二得到的权重矩阵,将多航天器追逃问题转换为带权二分图的最优匹配问题,为各追踪器匹配逃逸器。多对多航天器追逃博弈问题的分为等数量追逃、少追多逃和多追少逃问题三类情形进行匹配,直到找到相等子图的完全匹配为止。
28、对于二分图的基本概念:若图中的顶点分为两个不相交的子集,且图中的每条边所关联的两个顶点分别属于不同的顶点集,则此图为一个二分图,在二分图中,一个匹配是一个边的集合,其中任意两条边都没有公共顶点,定义匹配点、匹配边、未匹配点、未匹配边等概念。二分图的最大匹配是指,在一个图的所有匹配中,所含匹配边数最多的匹配。可以通过寻找增广路径来增加匹配中的匹配边和匹配点,从而求解出最大匹配。在二分图中,从一个未匹配点出发,依次经过未匹配边、匹配边、未匹配边……的交替顺序形成的路径称为交替路径;若交替路径最终到达了另一个未匹配点,则该交替路径称为增广路径。若二分图的每条边都有一个权值,此二分图即为带权二分图。如果将逃逸器和追踪器看作二分图的左右顶点,将追逃双方之间的匹配关系看作二分图的边,其权重由步骤二计算得出,则追逃双方的最优匹配即为带权二分图的边权重和最大的完全匹配。
29、设带权二分图m={p,e,l,s},顶点集p={p1,p2,…,pm}代表追踪器,顶点集e={e1,e2,…,en}代表逃逸器,边集l代表配对情况,集合s提供每条边的权重值。若追踪器i选择逃逸器j,则边lij存在,边权重由sij表示。在匹配开始前,每个追踪器都能够选择任意一个逃逸器作为追踪目标,多对多航天器追逃博弈问题的三类情形均用带权二分图表示。
30、多对多航天器追逃博弈问题的三类情形:等数量追逃、少追多逃和多追少逃问题均通过下述方法进行匹配:
31、(1)初始化顶标值;选择顶点数较少的一方为出发集,另一方为待匹配集,对带权二分图中的每一个顶点设置顶标值;由于要寻找权值和最大的完全匹配,先将出发集内所有顶点的顶标值设置为它所能连接的边的最大权值,将待匹配集的所有顶标值设为0;对于带权二分图中的任意一条边lij,需保证pi+ej≥sij始终成立;追踪方p的顶标为pi,逃逸方e的顶标为ej;
32、(2)寻找完全匹配。首先定义相等子图,即顶标和等于边权重的子图。对于l中的每个顶点,在相等子图中寻找增广路径,在相等子图中为p1找到路径p1-e1。然后,同理在相等子图中为p2搜索增广路径,顶标和等于边权重的只有p2-e1,但e1已匹配,因此未找到增广路径,转入第三步(3)。
33、(3)若未找到增广路径,修改顶标值。此时,二分图的匹配不是完全匹配,需扩大相等子图。顶标修改规则为:将出发集中轮到匹配的点和已匹配的点的顶标值减少d,待匹配集中匹配过的点的顶标值增加d,变量d=min{pi+ej-sij}。若将任意一条点划线加入相等子图中,p2可以找到增广路径p2-e2(或p2-e3或p2-e1-p1-e2)。由于每条点划线的左右顶标和与边权值的差不尽相同(例如对p1-e2,该值为10+0-7=3,同理p2-e2的差值为1,p2-e3的差值为3),为了使权值和尽可能大,需使顶标减去最小值。该最小值为1,因此出发集中p1和p2的顶标值减1,待匹配集中e1的顶标值加1,依此操作,p2找到增广路径p2-e2,且二分图的权值减少最少。
34、(4)重复步骤三(2)、(3),直到找到相等子图的完全匹配为止。
35、步骤四:当追逃双方的数目和状态给定后,根据步骤二和步骤三确定追逃双方之间的对应关系,进而求解追逃双方的最优控制策略。
36、逃逸器和追踪器的状态变量分别用xe和xp表示,控制量输入用ue和up表示,追逃双方的相对状态变量用x表示。状态方程写为
37、
38、根据追逃双方的终端距离和燃料消耗建立支付函数:
39、
40、其中,0和tf分别表示博弈起始时刻和终端时刻;s为半正定对称矩阵,代表终端距离权重;rp和re均为正定对称矩阵,分别代表追踪器和逃逸器的能量权重。
41、引入协态变量λ(t)后,式(11)改写为
42、
43、横截泛函为:
44、
45、式(12)的协态方程和状态方程如下:
46、
47、令得到追逃双方的最优控制策略为
48、
49、其中,ukmax为航天器的加速度幅值。
50、利用pontryagin极小值原理的边界条件将式(15)进一步改写为
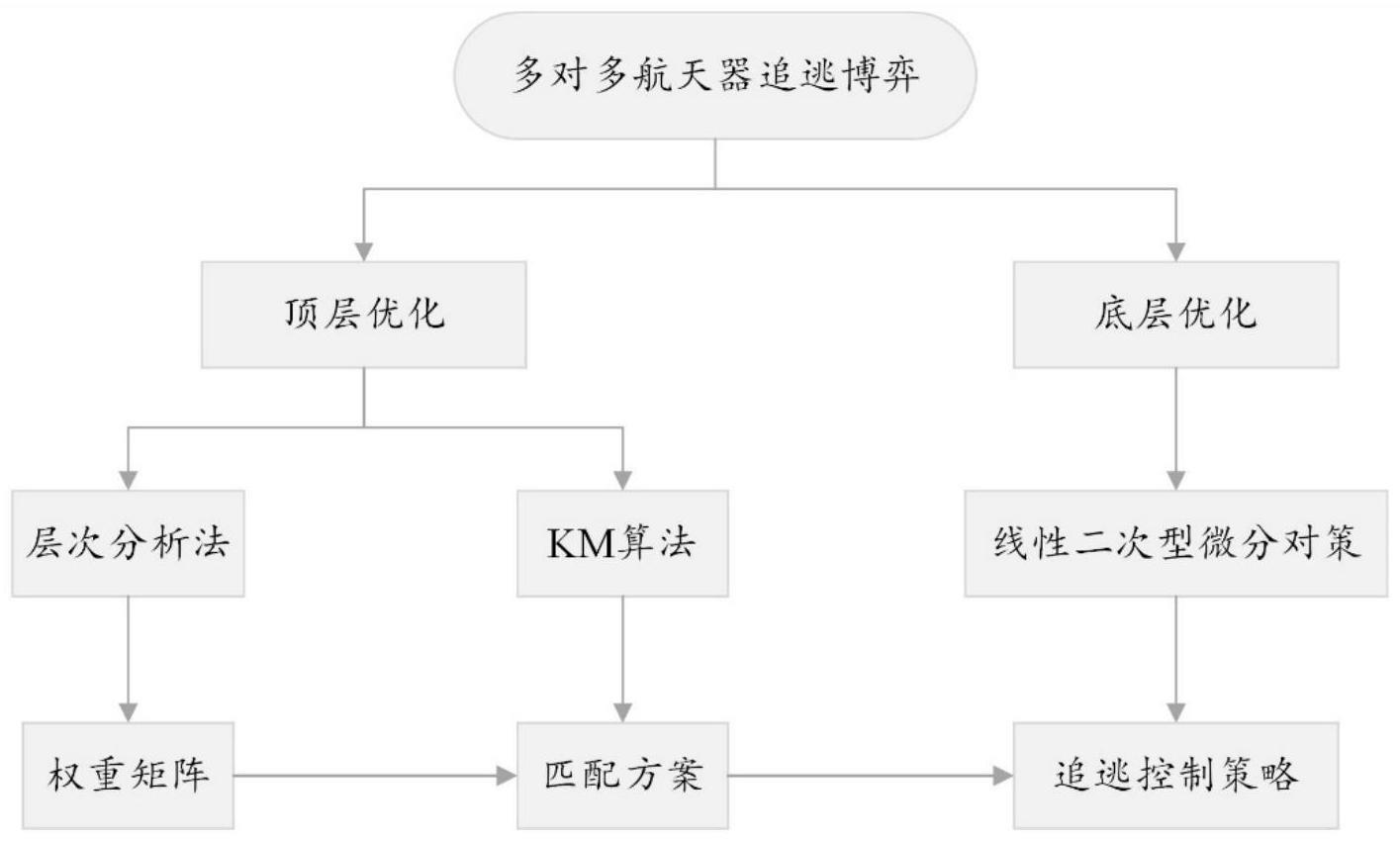
51、
52、其中,为使公式(16)简洁,令qp=b(rp)-1bt,qe=b(re)-1bt,则矩阵函数p(t)满足:
53、
54、根据公式(16)至(17)确定追逃双方之间的对应关系,进而求解得到追逃双方的最优控制策略。
55、还包括步骤五:根据步骤四求解确定的追逃双方的最优控制策略,实现追逃双方动态最优控制,使追踪方拦截的逃逸器数目最多,且终端距离较小,进而实现追逃双方的最优追击。
56、有益效果:
57、1、本发明公开的一种用于多航天器追逃博弈任务的动态匹配方法,将多对多追逃博弈问题拆解为顶层优化和底层优化分别解算。在顶层优化中,将追逃双方的状态信息转化为对应的权重矩阵,进而解决逃逸器和追踪器间的最优匹配问题;在底层优化中,求解追逃双方最优控制策略。
58、2、本发明公开的一种用于多航天器追逃博弈任务的动态匹配方法,仅通过评估追逃双方的机动能力、位置和速度即能生成有效的任务匹配策略,相比随机匹配的计算量更小。
59、3、本发明公开的一种用于多航天器追逃博弈任务的动态匹配方法,由于追逃双方航天器的状态在博弈过程中会随时间发生变化,本发明能够根据航天器状态变化动态调整匹配策略,具有实时性强的特点。
60、4、本发明公开的一种用于多航天器追逃博弈任务的动态匹配方法,分别分析等数量追逃、多追少逃和少追多逃三类情景下的多航天器追逃博弈问题,本发明生成的动态匹配策略明显优于静态匹配策略,即适当地切换追踪目标帮助追踪航天器及时调整追击策略,从而实现整体最优的追击效果。
61、5、本发明公开的一种用于多航天器追逃博弈任务的动态匹配方法,能够保证追踪方拦截的逃逸器数目最多,且终端距离较小。
- 还没有人留言评论。精彩留言会获得点赞!