一种基于元学习的静态动态协同图卷积交通预测方法与流程
本技术属于交通预测,尤其涉及一种基于元学习的静态动态协同图卷积交通预测方法。
背景技术:
1、作为智能交通系统的重要组成部分,交通流量预测对于许多交通应用场景至关重要,如提供交通信息以缓解交通拥堵并为交通管理者决策提供便利。交通流量预测旨在通过分析历史交通状况以预测未来交通流量。然而,交通数据中隐含的复杂时空特征使得实现准确可靠的交通流量预测具有很大的挑战性。
2、到目前为止,学者们已经开展了许多研究工作,通过捕获时空特征来提高交通流量预测的准确性和可靠性,其中时空模型受到了广泛关注。本质上,时空模型通过分析不同道路上交通流量的相互作用以提取空间特征,并对每条道路上的交通流量进行序列建模以提取时间特征。虽然时空模型取得了可喜的进展,但仍然存在着导致交通流量预测准确性和可靠性不高的诸多问题。例如,现有模型通常不会在空间和时间特征之间建立深度联系,导致模型从交通数据中提取复杂时空特征的能力不足。又如,交通流量受到静态因素(如交通网络拓扑结构、区域功能相似性)和动态(如商业活动、交通事故)因素的单独作用和共同作用的影响。然而,现有模型直接将上述因素进行叠加,导致无法提取出深层次的空间特征。又如,现有模型捕获时空特征时没有考虑不同道路上的局部交通状况,无法捕获细粒度特征。
技术实现思路
1、本技术的目的是提供一种基于元学习的静态动态协同图卷积交通预测方法,以解决现有技术无法提取出深层次的空间特征以及无法捕获细粒度特征的问题。
2、为了实现上述目的,本技术技术方案如下:
3、一种基于元学习的静态动态协同图卷积交通预测方法,包括:
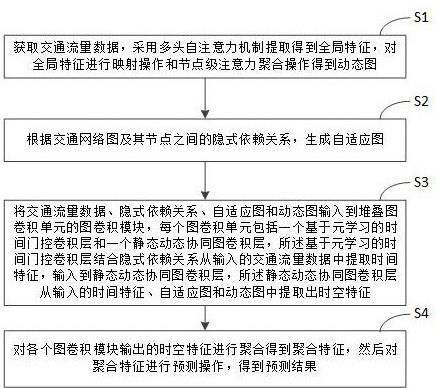
4、获取交通流量数据,采用多头自注意力机制提取得到全局特征,对全局特征进行映射操作和节点级注意力聚合操作得到动态图;
5、根据交通网络图及其节点之间的隐式依赖关系,生成自适应图;
6、将交通流量数据、隐式依赖关系、自适应图和动态图输入到堆叠图卷积单元的图卷积模块,每个图卷积单元包括一个基于元学习的时间门控卷积层和一个静态动态协同图卷积层,所述基于元学习的时间门控卷积层结合隐式依赖关系从输入的交通流量数据中提取时间特征,输入到静态动态协同图卷积层,所述静态动态协同图卷积层从输入的时间特征、自适应图和动态图中提取出时空特征;
7、对各个图卷积模块输出的时空特征进行聚合得到聚合特征,然后对聚合特征进行预测操作,得到预测结果。
8、进一步的,所述对全局特征进行映射操作和节点级注意力聚合操作得到动态图,包括:
9、;
10、;
11、;
12、;
13、其中,表示所有节点的全局特征,是批量大小, n表示节点数,是输入窗口大小;表示卷积核,是隐藏特征的特征维度,是注意力头的数量;是可学习的参数集;是偏置集;是映射操作后的全局特征,是图卷积单元的隐藏维度;表示动态相似图的邻接矩阵;是历史动态图的邻接矩阵;是动态图的邻接矩阵,
14、是的平均张量表示,和是的前向和后向转移矩阵;是动态图的邻接矩阵集,为映射操作,为节点级注意力聚合操作。
15、进一步的,所述根据交通网络图及其节点之间的隐式依赖关系,生成自适应图,包括:
16、第 l个自适应图的邻接矩阵集可以用如下等式表示:
17、;
18、其中和分别是交通网络图的前向和后向转移矩阵,节点之间的隐式依赖关系采用数据驱动的方式进行量化得到。
19、第 l个自适应图的邻接矩阵集可以用如下等式表示:
20、;
21、其中和分别是交通网络图的前向和后向转移矩阵,节点之间的隐式依赖关系采用数据驱动的方式进行量化得到。
22、进一步的,所述图卷积单元的传播规则表示为:
23、;
24、;
25、其中和分别表示第 l个图卷积单元中基于元学习的时间门控卷积层和静态动态协同图卷积层的输出特征,和分别表示第 l个图卷积单元中基于元学习的时间门控卷积层和静态动态协同图卷积层的操作,表示节点之间的隐式依赖关系,表示第 l个自适应图的邻接矩阵集,表示动态图的邻接矩阵集。
26、进一步的,所述基于元学习的时间门控卷积层结合隐式依赖关系从输入的交通流量数据中提取时间特征,包括:
27、通过映射操作提取元知识:
28、;
29、;
30、其中和是可学习参数集,和是偏置集,和是第 l个图卷积单元中基于元学习的时间门控卷积层中具有空间特征的元知识,是时间门控卷积的卷积核大小,是节点之间的隐式依赖关系,为映射操作;
31、对于任一节点,元知识和分别取自和;
32、然后,将的矩阵形状由转化为,并将转化后的元知识作为时间门控卷积的卷积核参数,作为时间门控卷积的偏置参数;
33、时间门控卷积对任一节点的卷积运算可表示为:
34、;
35、;
36、其中和分别是时间门控卷积对节点卷积运算的输入和输出特征,和是大小相等的特征,表示激活函数,表示哈达玛乘积,表示残差连接函数,第 l个图卷积单元中基于元学习的时间门控卷积层的输出表示为:
37、;
38、其中是时间门控卷积对所有节点的输出特征,表示批归一化操作。
39、进一步的,所述静态动态协同图卷积层从输入的时间特征、自适应图和动态图中提取出时空特征,包括:
40、在第 l个图卷积单元中生成一个共性图:
41、;
42、;
43、;
44、其中是共性图的邻接矩阵,和分别是的前向和后向转移矩阵,是共性图的邻接矩阵集,、和分别是的输入特征、个输入邻接矩阵的集合和可学习参数集,是扩散步长;
45、然后,基于扩散卷积,静态动态协同图卷积层通过执行静态动态协同图卷积操作来深度提取空间特征,其过程表示如下:
46、;
47、;
48、;
49、;
50、;
51、;
52、;
53、其中、、、、和是可学习参数集,、和分别是自适应图、动态图和共性图的第一个扩散卷积运算的输出,大小为,、和分别是自适应图、动态图和共性图的第二个扩散卷积运算的输出,大小为。
54、进一步的,所述对各个图卷积模块输出的时空特征进行聚合得到聚合特征,包括:
55、;
56、;
57、其中、、代表卷积核,表示聚合特征的通道维度,表示待聚合的特征集,表示细粒度的聚合特征,为节点级注意力聚合操作。
58、进一步的,所述对聚合特征进行预测操作,得到预测结果,包括:
59、;
60、;
61、其中是可学习的共享参数集,是输出模块进一步提取的空间特征,是输出模块生成的预测结果,为扩散卷积,表示时间门控卷积。
62、本技术提出的一种基于元学习的静态动态协同图卷积交通预测方法,通过元学习来增强空间和时间特征之间的联系,并支持空间特征的深度提取;采用注意力机制为每个节点选择性地聚合适当的特征,使模型能够提取出细粒度的时空特征。
- 还没有人留言评论。精彩留言会获得点赞!