基于机器视觉实现内窥镜进退镜速度的检测方法
本发明涉及图像检测处理,尤其涉及内窥镜影像视觉检测图像处理,具体是指一种基于机器视觉实现内窥镜进退镜速度的检测方法。
背景技术:
1、内镜检查是指操作人员利用电子内窥镜进入需检查的自然腔道,开始进镜直至腔道末端,然后开始退镜,对检查腔道内的病灶状况进行观察。进镜和退镜的速度过慢影响内镜检查的效率;速度过快则会较大地提高病灶漏检率和误检率,影响检查质量;同时,过快的进退镜速度容易损伤患者的自然腔道壁,造成除病灶外的二次伤害。对于内镜检查时无法注射麻药的特殊群体,过快或过慢的进退镜速度会加剧检查的不适感。因此,在进退镜过程中准确确定出进退镜的速度对提升内镜检查的效果至关重要。
技术实现思路
1、本发明的目的是提供一种基于机器视觉实现内窥镜进退镜速度的检测方法,能够实现精准测量的。
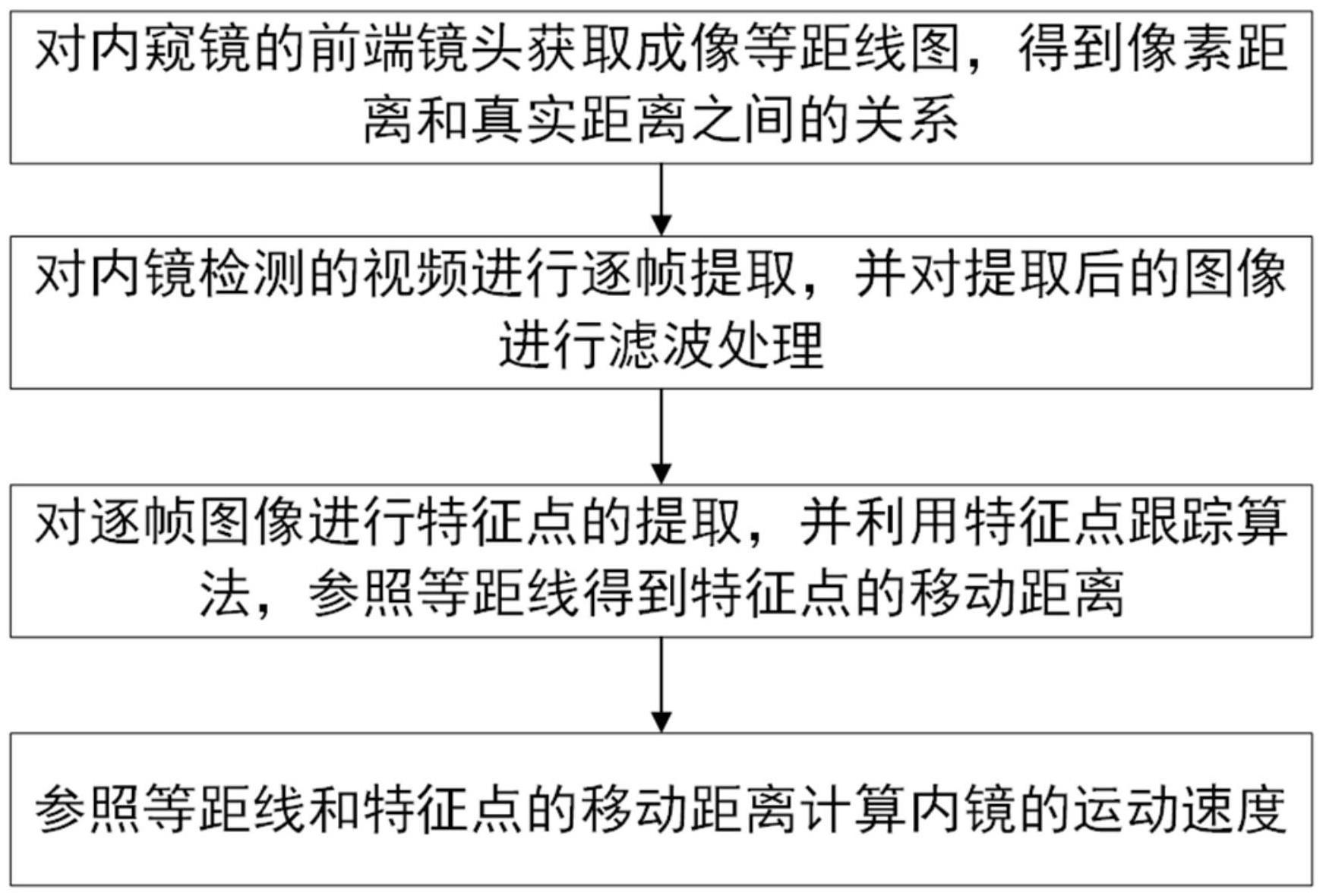
2、本发明技术方案的发明思路如下:内窥镜检查例如结肠镜检查所传输的影像中,肠道壁边缘会存在较深的血管纹理或是亮度均匀的高亮光斑,可以通过机器视觉的方法提取其作为特征点。首先,对内窥镜的前端镜头,获取等距线图,逐帧提取内镜检测视频,将提取的图片进行自适应高斯滤波的去噪处理;利用sift算法在完成去噪处理的图像上提取特征点,利用金字塔光流算法对特征点进行追踪;追踪完成后,采用跟踪点准确性检测算法,输出跟踪点坐标,即特征点运动的终止位置;利用设置等距线和特征点坐标计算内窥镜的运动速度和距离。
3、为了实现上述目的,基于机器视觉实现医用内窥镜进退镜速度的检测方法如下:
4、s1,对内窥镜的前端镜头获取成像等距线图,得到像素距离和真实距离之间的关系;
5、内窥镜在腔道内的可视范围为x,则记内窥镜的图像显示边缘为0边界线,以间隔,0边界线为起始,沿腔道壁m等份均匀绘制等距线,分割可视范围;由等距线可测算的像素距离和真实距离的关系,记为距离系数α,单位:毫米/像素。
6、实验测算可得下表,
7、表1距离系数对应表
8、 范围 (0,d] (d,2d] (2d,3d] … ((m-2)d,(m-1)d] ((m-1)d,x] α <![cdata[q<sub>1</sub>]]> <![cdata[q<sub>2</sub>]]> <![cdata[q<sub>3</sub>]]> … <![cdata[q<sub>m-1</sub>]]> <![cdata[q<sub>m</sub>]]>
9、s2,通过内镜检测的视频,并进行图像的逐帧提取,生成图像a;
10、s3,将所述图像a进行平滑处理,分成图像a1,包括:将图像划分成不同区域,计算区域对应的像素值的方差d,根据方差d自适应的选择高斯模板参数σ2和高斯模板n的大小,进行有效的去噪处理,其中方差的计算公式为:
11、
12、si,j表示中心点(i,j)附近的(2k+1)×(2k+1)大小的邻域。
13、s4,输入所述图像a1,提取sift角点,保存特征点位置坐标,;
14、s5,根据步骤s4所提取的特征点,通过金字塔光流算法,得到特征点的移动距离;
15、s6,利用跟踪点准确性检测算法,检测s5由跟踪算法生成的所述跟踪点是否准确,输出可用的准确跟踪点和其原本特征点;如果没有准确对应特征点,则重复s5;
16、s7,设单位时间内共检测到i帧图像变化。为内镜在第n帧图像的真实运动距离。为内镜在第n+i帧图像的真实运动距离。
17、vn是内镜运动的起始位置在第n帧图像下的真实运动速度。vn+i是内镜运动的起始位置在第n+i帧图像下的真实运动速度。tn为内镜运动到第n帧图像的运动时间。则表示单位时间内,内窥镜的真实运动速度。
18、
19、
20、
21、基于表1,设特征点在第n帧图像运动的起始位置坐标为(x1,y1)、(x2,y2)、......、(xk,yk),终止位置坐标为(x1,y1)、(x2,y2)、......、(xk,yk)。sk表示点(xk,yk)起始位置移动到终止位置的真实移动距离,则内镜在世界坐标下的真实运动距离计算公式如下:
22、
23、分以下四种情况计算sk:
24、(1)特征点移动的起始位置在0边界线,终止位置在((h-1)d,hd]内:
25、
26、(2)特征点移动的起始位置和终止位置都在((h-1)d,hd]内:
27、sk=||(xk,yk)-(xk,yk)||·qh
28、(3)特征点移动的起始位置在((h-1)d,hd]内,移动的终止位置在((h+i-1)d,(h+i)d]内:
29、记,处在和特征点的起始位置同轴且过hd等距线的点为(xh,yh),处在和特征点的起始位置同轴且过(h+i-1)d等距线的点为(xh+i-1,yh+i-1),则
30、sk=(sh(x,y)·qh+(i-1)d+sh+i-1(x,y)·qh+i)
31、sh(x,y)=||(xk,yk)-(xh,yh)||
32、sh+i-1(x,y)=||(xk,yk)-(xh+i-1,yh+i-1)||
33、(4)特征点移动的起始位置在hd等距线上,运动的移动位置在(h+i)d等距线上,则
34、sk=id
35、采用了本发明所使用的基于机器视觉实现医用内窥镜进退镜速度的检测方法,可以有效地监测在执行内镜检查时,内窥镜在自然腔道内的运动速度和方向,可有效避免因内镜运动速度过快或过慢造成的漏检、误检的状况,减少在内镜检查当中的不适感和体内损伤。
36、需要与传统速度检测算法区别的是,在内镜检查的过程当中,自然腔道会存在自发的蠕动现象,对于传统速度检测算法实现跟踪点和特征点的选取会造成较大的干扰,存在跟踪点匹配错误、特征点无法提取的问题。采用了本发明所使用的基于机器视觉实现医用内窥镜进退镜速度的检测方法,可有效提高跟踪点和特征点选取的准确性,实现精准的速度检测。
- 还没有人留言评论。精彩留言会获得点赞!