基于车载激光点云的道路上方设施净空计算方法、系统
本发明涉及车载激光点云数据处理领域,特别涉及基于车载激光点云的道路上方设施净空计算方法、系统。
背景技术:
1、净空是道路满足正常通行需求所必须满足的竖向高度,即道路范围内路面与其上方设施之间的垂直距离,在一些道路场景中,尤其是一些公路路段,在道路上方会有一些设施横跨路面(例如电线杆、跨线桥等),在净空方向上,这些横跨路面的设施会对行驶车辆的限高和安全产生一定要求。现有技术一般是利用测量轨迹的位置与高程信息作为参照完成道路上方设施的净空计算,但是这在测量过程中可能产生的车辆移动偏差等问题,照此确定的道路范围存在误差,同时采用轨迹位置进行逐点计算,易受到路面点云中异常点或者噪声点的影响。
技术实现思路
1、本发明所要解决的技术问题是:提出基于车载激光点云的道路上方设施净空计算方法、系统,利用改进的滚球法对路面点云进行道路轮廓提取以划定道路范围,筛选高程并提取道路上方设施,计算道路净空,计算精度高且适用性高。
2、本发明为解决上述技术问题采用以下技术方案:
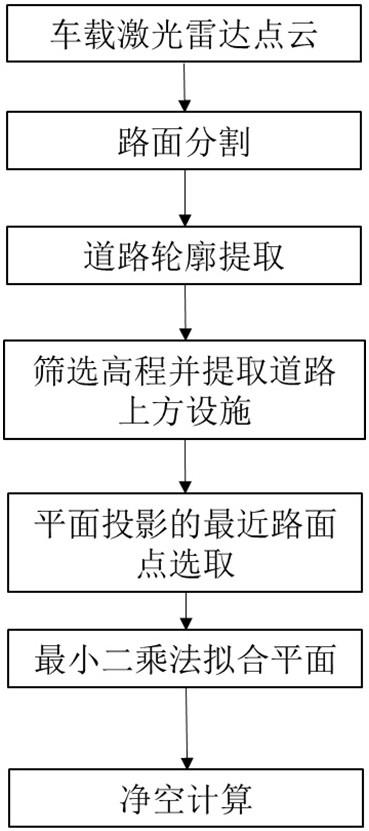
3、基于车载激光点云的道路上方设施净空计算方法,包括如下步骤:
4、s1、对车载激光点云进行路面提取,获得路面点云。
5、s2、利用改进的滚球法对路面点云进行轮廓提取和道路范围划定。
6、s3、筛选高程并识别道路上方设施。
7、s4、利用kd-tree数据结构搜索出道路上方设施在平面投影的最近n个路面点。
8、s5、通过最小二乘法将n个路面点拟合成平面方程,计算道路净空。
9、进一步的,步骤s1中,路面提取的具体内容为:
10、利用kd-tree数据结构搜索每个点邻域内的k个点,利用主成分分析方法,获取特征值λ1、λ2、λ3,并定义最小特征值为λ3,其对应的特征向量为σ3;设定特征向量σ3的坐标为z轴方向特征向量σ3与z轴的夹角为θ,提取路面点云,具体计算公式为:
11、
12、
13、将夹角θ≤θz的路面点分离出来,获得路面点云;其中,θz为夹角阈值,取值范围为0~0.05。
14、进一步的,步骤s2中,轮廓提取的具体步骤如下:
15、s201、在路面点云中任取一点p1(x1,y1,z1),利用kd-tree数据结构搜索邻域内的k个点,k值可以根据实际情况取值,为10-20,设定p1与邻域内k个点的距离为di,则r的计算公式为:
16、
17、其中,r表示邻域点距离的总和。
18、s202、以2r为半径作圆,将位于圆中的路面点置于集合s中。
19、s203、在集合s中取一点p2(x2,y2,z2),计算过点p1且半径为r的圆心c1(xc1,yc1)坐标,以及过点p2且半径为r的圆心c2(xc2,yc2)坐标,具体公式为:
20、
21、
22、
23、
24、
25、其中,p设定为一个中间参数。
26、s204、计算集合s中的所有点到c1、c2的距离,若集合s中所有的点到c1或c2的距离都大于r,则p2为边界点;否则进入步骤s203,重新选取p2。
27、直至历遍集合s中的点。
28、s205、重复步骤s201至s204,直至历遍路面点云中所有的点,得到道路轮廓。
29、进一步的,步骤s3中,识别道路上方设施的具体步骤如下:
30、s301、以路面点云高程的最高值zh为基准,若点的高程zi满足zi>zh+zg,则将其筛选出作为候选点,其中zg为高程阈值。
31、s302、选择一个候选点投影至xy平面,加入到分割的路面点云中。
32、s303、采用改进的滚球法计算加入了候选点的路面点云的轮廓。
33、s304、若该候选点在轮廓边界线上,说明其不在道路范围内,则排除;若该候选点不在轮廓边界线上,说明其在道路范围内,则将其提取出来。
34、s305、重复步骤s302至s304,直至将每一个候选点判断完成。
35、s306、最终提取出的所有候选点即为所需的道路上方设施点。
36、进一步的,步骤s5中,计算道路净空的具体步骤如下:
37、s501、在道路上方设施点中任选一点,投影至xy平面,利用kd-tree数据结构搜索出在xy平面上距离其最近的n个路面点。
38、s502、从n个路面点中选出任一点(xi,yi,zi),通过最小二乘法得到拟合成的平面方程,具体公式为:
39、
40、其中,i=1,2,…,n。
41、求解得到a、b、c的值,从而得到拟合平面方程ax+by-z+c=0。
42、s503、设定道路上方设施点坐标为(xi,yi,zi),根据平面方程为ax+by-z+c=0,则该处的道路净空为:
43、
44、s504、重复步骤s502至s503,直至得到n个路面点的道路净空。
45、进一步的,本发明还提出了基于车载激光点云的道路上方设施净空计算系统,包括
46、路面点云模块,用于利用kd-tree数据结构,对车载激光点云进行路面提取。
47、道路轮廓提取模块,用于利用改进的滚球法对路面点云进行轮廓提取和道路范围划定。
48、道路上方设施点模块,用于筛选高程并识别道路上方设施。
49、平面投影路面点模块,用于利用kd-tree数据结构搜索出道路上方设施在平面投影上的最近n个路面点。
50、道路净空模块,用于通过最小二乘法将n个路面点拟合成平面方程,计算道路净空。
51、进一步的,本发明还提出了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现前文所述的基于车载激光点云的道路上方设施净空计算方法的步骤。
52、进一步的,本发明还提出了一种计算机可读的存储介质,所述计算机可读的存储介质存储有计算机程序,所述计算机程序被处理器运行时执行前文所述的基于车载激光点云的道路上方设施净空计算方法。
53、本发明采用以上技术方案,与现有技术相比,其显著技术效果如下:
54、1、本发明利用提取的路面点,确定道路轮廓并划定道路范围,对上方设施点所处位置的进行特征识别、拟合并计算净空,实现了对无明显形态特征的道路上方附设施的提取与计算净空。
55、2、采用改进的滚球法对路面点云进行轮廓提取和道路范围划定,区别于传统滚球法,主要改进了:(1)设置动态r值,让r值在不同密集程度区域自适应变化,由搜索点与邻域内k个点距离的平均值确定,其中k个点通过kd-tree数据结构搜索得出;(2)以2r为半径圈定搜索范围,减少循环次数,可以提升运算效率。
56、3、对提取的道路上方设施点,通过kd-tree数据结构搜索出在xy平面上距离其最近的n个路面点,通过最小二乘法拟合成平面方程并进行净空计算,可以消除路面异常点对计算结果的影响,将净空计算问题转化为点至平面距离计算问题。
- 还没有人留言评论。精彩留言会获得点赞!