一种针对红外图像的图像处理方法、装置及电子设备与流程
本技术涉及红外图像处理,特别是涉及一种针对红外图像的图像处理方法、装置及电子设备。
背景技术:
1、红外热成像作为成像系统的重要技术,目前通常采用传感器阵列进行成像,随着传感器工艺水平的提高以及应用需求的不断提升,其像元规模已扩大至上百万单位。
2、但是,由于传感器阵列的制造材料、工艺、电路、设备形态及使用环境等的原因,在短时间受到强烈冲击后,传感器阵列进行成像所得到的红外图像中会产生横纹。例如:枪支上设有红外相机,在打枪瞬间,红外相机中的传感器阵列受到强烈冲击,导致传感器阵列进行成像所得到的红外图像中存在横纹。其中,横纹可以理解为红外图像内出现的一种条纹状的非均匀噪声。
3、目标,亟需一种针对红外图像的图像处理方法,从而对存在横纹的红外图像有效地进行横纹去除。
技术实现思路
1、本技术实施例的目的在于提供一种针对红外图像的图像处理方法、装置及电子设备,可以对存在横纹的红外图像有效地进行横纹去除。具体技术方案如下:
2、第一方面,本技术实施例提供了一种针对红外图像的图像处理方法,包括:
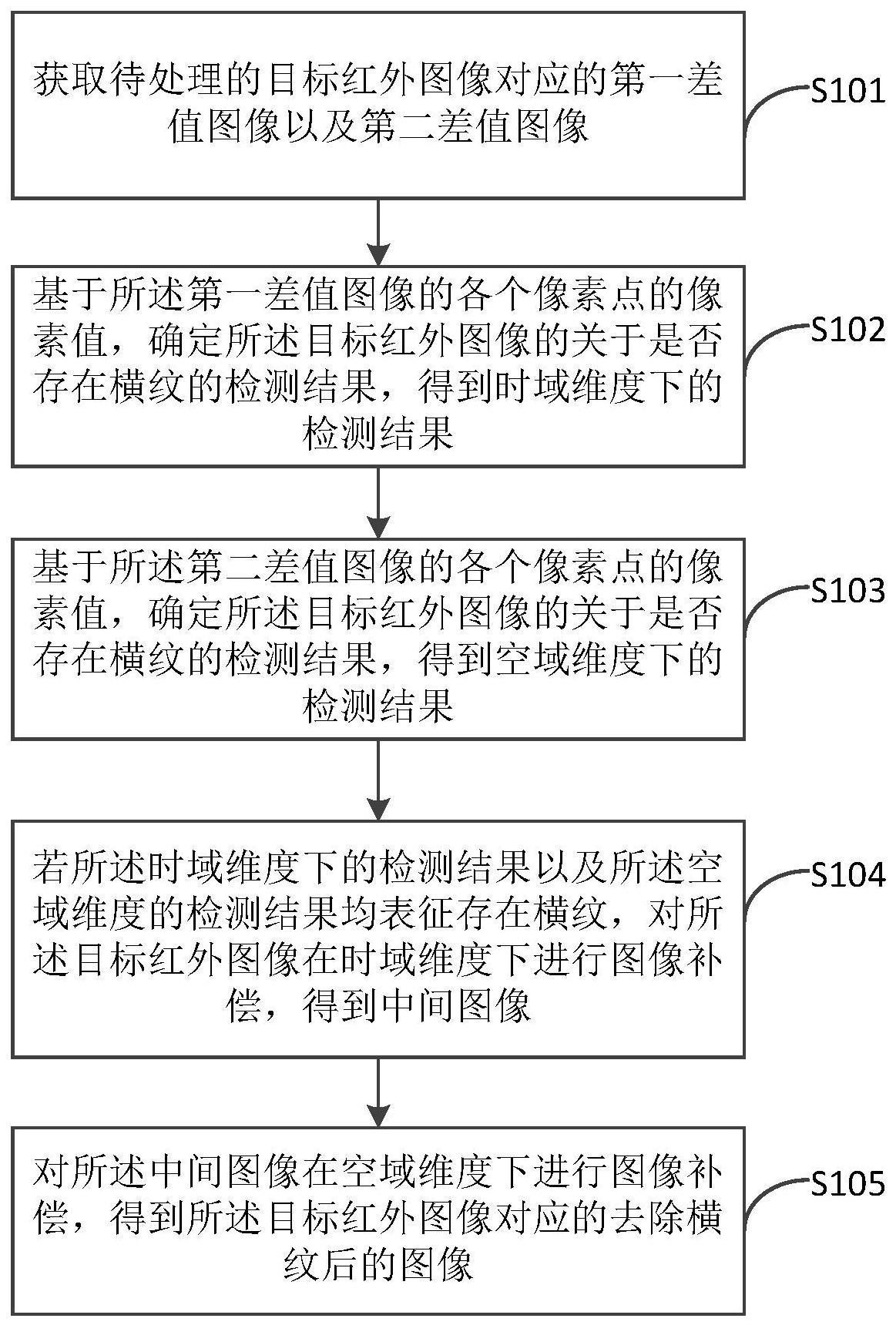
3、获取待处理的目标红外图像对应的第一差值图像以及第二差值图像;其中,所述第一差值图像为所述目标红外图像与相对应的前一帧图像的差值图像,所述第二差值图像为所述目标红外图像与经过滤波处理后的目标红外图像的差值图像;
4、基于所述第一差值图像的各个像素点的像素值,确定所述目标红外图像的关于是否存在横纹的检测结果,得到时域维度下的检测结果;
5、基于所述第二差值图像的各个像素点的像素值,确定所述目标红外图像的关于是否存在横纹的检测结果,得到空域维度下的检测结果;
6、若所述时域维度下的检测结果以及所述空域维度的检测结果均表征存在横纹,对所述目标红外图像在时域维度下进行图像补偿,得到中间图像;
7、对所述中间图像在空域维度下进行图像补偿,得到所述目标红外图像对应的去除横纹后的图像。
8、可选地,所述基于所述第一差值图像的各个像素点的像素值,确定所述目标红外图像的关于是否存在横纹的检测结果,得到时域维度下的检测结果,包括:
9、基于所述第一差值图像的各个像素点的像素值,对所述第一差值图像进行关于是否存在横纹的检测,得到第一检测结果;
10、若所述第一检测结果表征存在横纹,则将所述目标红外图像的关于是否存在横纹的检测结果设置为存在横纹,得到时域维度下的检测结果;
11、若所述第一检测结果表征不存在横纹,则将所述目标红外图像的关于是否存在横纹的检测结果设置为不存在横纹,得到时域维度下的检测结果。
12、可选地,所述基于所述第二差值图像的各个像素点的像素值,确定所述目标红外图像的关于是否存在横纹的检测结果,得到空域维度下的检测结果,包括:
13、基于所述第二差值图像的各个像素点的像素值,对所述第二差值图像进行关于是否存在横纹的检测,得到第二检测结果;
14、若所述第二检测结果表征存在横纹,则将所述目标红外图像的关于是否存在横纹的检测结果设置为存在横纹,得到空域维度下的检测结果;
15、若所述第二检测结果表征不存在横纹,则将所述目标红外图像的关于是否存在横纹的检测结果设置为不存在横纹,得到空域维度下的检测结果。
16、可选地,所述基于所述第一差值图像的各个像素点的像素值,对所述第一差值图像进行关于是否存在横纹的检测,得到第一检测结果,包括:
17、根据所述第一差值图像的各个像素点的像素值,确定所述第一差值图像的各个像素点的像素类型;其中,所述像素类型包括第一类型或第二类型,所述第一类型和第二类型的像素点的亮暗程度不同,且第一类型的像素点的亮度高于第二类型的像素点的亮度;
18、根据所述第一差值图像的各个像素点的像素类型,统计所述第一差值图像中符合横纹条件的像素行的行数,作为第一行数;
19、若所述第一行数大于预设的第一行数阈值,将所述第一差值图像中存在横纹确定为第一检测结果,否则,将所述第一差值图像中不存在横纹确定为第一检测结果。
20、可选地,所述根据所述第一差值图像的各个像素点的像素值,确定所述第一差值图像的各个像素点的像素类型,包括:
21、针对所述第一差值图像的每一像素点,若该像素点的像素值满足第一条件,确定该像素点的像素类型为所述第一类型,若该像素点的像素值满足第二条件,确定该像素点的像素类型为所述第二类型;
22、其中,所述第一条件为大于第一像素阈值,所述第二条件为小于所述第一像素阈值的相反数。
23、可选地,所述根据所述第一差值图像的各个像素点的像素类型,统计所述第一差值图像中符合横纹条件的像素行的行数,作为第一行数,包括:
24、针对所述第一差值图像的每一像素行,对该像素行内的各个指定像素点对应的第一参考值进行求和,得到第一计算结果,若所得到的第一计算结果大于第一结果阈值,判定该像素行是属于亮条纹的像素行;若所得到的第一计算结果小于所述第一结果阈值的相反数,判定该像素行是属于暗条纹的像素行;
25、基于所确定出的属于亮条纹的像素行以及属于暗条纹的像素行,确定所述第一差值图像中符合横纹条件的像素行数,作为第一行数;
26、其中,所述指定像素点为具有像素类型的像素点,每一指定像素点对应的第一参考值为该像素点的像素类型的表征值,所述第一类型的表征值为正数,所述第二类型的表征值为所述第一类型的表征值的相反数。
27、可选地,所述基于所确定出的属于亮条纹的像素行以及属于暗条纹的像素行,确定所述第一差值图像中符合横纹条件的像素行数,作为一像素行数,包括:
28、按照预定的修正处理方式,对所确定出的属于亮条纹的像素行以及属于暗条纹的像素行进行修正处理;其中,所述修正处理方式包括:若所确定出的属于亮条纹的像素行中存在相邻的像素行,将相邻的像素行进行像素行合并,得到属于亮条纹的一像素行,和/或,若所确定出的属于暗条纹的像素行中存在相邻的像素行,将相邻的像素行进行像素行合并,得到属于暗条纹的一像素行;
29、在所述修正处理后,计算属于亮条纹的像素行以及属于暗条纹的像素行的总行数,得到所述第一差值图像中符合横纹条件的像素行数,作为第一行数。
30、可选地,所述基于所述第二差值图像的各个像素点的像素值,对所述第二差值图像进行关于是否存在横纹的检测,得到第二检测结果,包括:
31、根据所述第二差值图像的各个像素点的像素值,确定所述第二差值图像的各个像素点的像素类型;其中,所述像素类型包括第一类型或第二类型,所述第一类型和第二类型的像素点的亮暗程度不同,且第一类型的像素点的亮度高于第二类型的像素点的亮度;
32、根据所述第二差值图像的各个像素点的像素类型,统计所述第二差值图像中符合横纹条件的像素行的行数,作为第二行数;
33、若所述第二行数大于预设的第二行数阈值,将所述第二差值图像中存在横纹确定为第二检测结果,否则,将所述第二差值图像中不存在横纹确定为第二检测结果。
34、可选地,所述根据所述第二差值图像的各个像素点的像素值,确定所述第二差值图像的各个像素点的像素类型,包括:
35、针对所述第二差值图像的每一像素点,若该像素点的像素值满足第三条件,确定该像素点的像素类型为所述第一类型,若该像素点的像素值满足第四条件,确定该像素点的像素类型为所述第二类型;
36、其中,所述第三条件为大于第二像素阈值,所述第四条件为小于所述第二像素阈值的相反数。
37、可选地,所述根据所述第二差值图像的各个像素点的像素类型,统计所述第二差值图像中符合横纹条件的像素行的行数,作为第二行数,包括:
38、针对所述第二差值图像的每一像素行,对该像素行内的各个指定像素点对应的第一参考值进行求和,得到第二计算结果,若所得到的第二计算结果大于第二结果阈值,判定该像素行是属于亮条纹的像素行;若所得到的第二计算结果小于所述第二结果阈值的相反数,判定该像素行是属于暗条纹的像素行;
39、基于所确定出的属于亮条纹的像素行以及属于暗条纹的像素行,确定所述第二差值图像中符合横纹条件的像素行数,作为第二行数;
40、其中,所述指定像素点为具有像素类型的像素点,每一指定像素点对应的第一参考值为该像素点的像素类型的表征值,所述第一类型的表征值为正数,所述第二类型的表征值为所述第一类型的表征值的相反数。
41、可选地,所述基于所确定出的属于亮条纹的像素行以及属于暗条纹的像素行,确定所述第二差值图像中符合横纹条件的像素行数,作为第二行数,包括:
42、按照预定的修正处理方式,对所确定出的属于亮条纹的像素行以及属于暗条纹的像素行进行修正处理;其中,所述修正处理方式包括:若所确定出的属于亮条纹的像素行中存在相邻的像素行,将相邻的像素行进行像素行合并,得到属于亮条纹的一像素行,和/或,若所确定出的属于暗条纹的像素行中存在相邻的像素行,将相邻的像素行进行像素行合并,得到属于暗条纹的一像素行;
43、在所述修正处理后,计算属于亮条纹的像素行以及属于暗条纹的像素行的总行数,得到所述第二差值图像中符合横纹条件的像素行数,作为第二行数。
44、可选地,所述对所述目标红外图像在时域维度下进行图像补偿,得到中间图像,包括:
45、基于第一滤波器,对所述第一差值图像进行滤波,得到第一备用图像;其中,所述第一滤波器用于去除横波的滤波器;
46、确定所述第一差值图像与所述第一备用图像的差值图像,作为第一补偿图像;
47、基于第二滤波器,对所述第一补偿图像进行滤波,得到第一补偿值;其中,所述第二滤波器用于去除竖波的滤波器;
48、基于所述第一补偿值,对所述目标红外图像进行时域维度的图像补偿,得到中间图像。
49、可选地,所述对所述中间图像在空域维度下进行图像补偿,得到所述目标红外图像对应的去除横纹后的图像,包括:
50、基于第三滤波器,对所述中间图像进行滤波,得到第二备用图像,以及基于第四滤波器,对所述中间图像进行滤波,得到第三备用图像;其中,所述第三滤波器与所述第四滤波器为针对所述中间图像不同区域进行去除横纹的滤波器;
51、基于所述第二备用图像和第三备用图像,按照预定的确定方式,确定第二补偿图像;其中,所述预定的确定方式包括:针对所述中间图像的每一像素点,若所述第二备用图像中的、与该像素点相对应的第一像素点的像素值绝对值,小于所述第三备用图像中的、与该像素点相对应的第二像素点的像素值绝对值,将该像素点的初始补偿值,确定为与该像素点相对应的第一像素点的像素值,否则,将该像素点的初始补偿值,确定为与该像素点相对应的第二像素点的像素值,其中,与该像素点相对应的第一像素点以及第二像素点均为与该像素点位置匹配的像素点;
52、利用第五滤波器,对所述第二补偿图像进行滤波,得到第二补偿值;其中,所述第五滤波器用于去除竖波的滤波器;
53、基于所述第二补偿值,对所述中间图像进行在空域维度下的图像补偿,得到所述目标红外图像对应的去除横纹后的图像。
54、第二方面,本技术实施例提供了一种针对红外图像的图像处理装置,包括:
55、获取模块,用于获取待处理的目标红外图像对应的第一差值图像以及第二差值图像;其中,所述第一差值图像为所述目标红外图像与相对应的前一帧图像的差值图像,所述第二差值图像为所述目标红外图像与经过滤波处理后的目标红外图像的差值图像;
56、第一确定模块,用于基于所述第一差值图像的各个像素点的像素值,确定所述目标红外图像的关于是否存在横纹的检测结果,得到时域维度下的检测结果;
57、第二确定模块,用于基于所述第二差值图像的各个像素点的像素值,确定所述目标红外图像的关于是否存在横纹的检测结果,得到空域维度下的检测结果;
58、第一图像补偿模块,用于若所述时域维度下的检测结果以及所述空域维度的检测结果均表征存在横纹,对所述目标红外图像在时域维度下进行图像补偿,得到中间图像;
59、第二图像补偿模块,用于对所述中间图像在空域维度下进行图像补偿,得到所述目标红外图像对应的去除横纹后的图像。
60、可选地,所述第一确定模块,包括:
61、第一检测子模块,用于基于所述第一差值图像的各个像素点的像素值,对所述第一差值图像进行关于是否存在横纹的检测,得到第一检测结果;
62、第一设置子模块,用于若所述第一检测结果表征存在横纹,则将所述目标红外图像的关于是否存在横纹的检测结果设置为存在横纹,得到时域维度下的检测结果;
63、第二设置子模块,用于若所述第一检测结果表征不存在横纹,则将所述目标红外图像的关于是否存在横纹的检测结果设置为不存在横纹,得到时域维度下的检测结果;
64、可选地,所述第二确定模块,包括:
65、第二检测子模块,用于基于所述第二差值图像的各个像素点的像素值,对所述第二差值图像进行关于是否存在横纹的检测,得到第二检测结果;
66、第三设置子模块,用于若所述第二检测结果表征存在横纹,则将所述目标红外图像的关于是否存在横纹的检测结果设置为存在横纹,得到空域维度下的检测结果;
67、第四设置子模块,用于若所述第二检测结果表征不存在横纹,则将所述目标红外图像的关于是否存在横纹的检测结果设置为不存在横纹,得到空域维度下的检测结果;
68、可选地,所述第一检测子模块,包括:
69、第一确定单元,用于根据所述第一差值图像的各个像素点的像素值,确定所述第一差值图像的各个像素点的像素类型;其中,所述像素类型包括第一类型或第二类型,所述第一类型和第二类型的像素点的亮暗程度不同,且第一类型的像素点的亮度高于第二类型的像素点的亮度;
70、第一统计单元,用于根据所述第一差值图像的各个像素点的像素类型,统计所述第一差值图像中符合横纹条件的像素行的行数,作为第一行数;
71、第二确定单元,用于若所述第一行数大于预设的第一行数阈值,将所述第一差值图像中存在横纹确定为第一检测结果,否则,将所述第一差值图像中不存在横纹确定为第一检测结果;
72、可选地,所述第一确定单元,包括:
73、第一确定子单元,用于针对所述第一差值图像的每一像素点,若该像素点的像素值满足第一条件,确定该像素点的像素类型为所述第一类型,若该像素点的像素值满足第二条件,确定该像素点的像素类型为所述第二类型;
74、其中,所述第一条件为大于第一像素阈值,所述第二条件为小于所述第一像素阈值的相反数;
75、可选地,所述第一统计单元,包括:
76、第一求和子单元,用于针对所述第一差值图像的每一像素行,对该像素行内的各个指定像素点对应的第一参考值进行求和,得到第一计算结果,若所得到的第一计算结果大于第一结果阈值,判定该像素行是属于亮条纹的像素行;若所得到的第一计算结果小于所述第一结果阈值的相反数,判定该像素行是属于暗条纹的像素行;
77、第二确定子单元,用于基于所确定出的属于亮条纹的像素行以及属于暗条纹的像素行,确定所述第一差值图像中符合横纹条件的像素行数,作为第一行数;
78、其中,所述指定像素点为具有像素类型的像素点,每一指定像素点对应的第一参考值为该像素点的像素类型的表征值,所述第一类型的表征值为正数,所述第二类型的表征值为所述第一类型的表征值的相反数;
79、可选地,所述第二确定子单元,还用于按照预定的修正处理方式,对所确定出的属于亮条纹的像素行以及属于暗条纹的像素行进行修正处理;其中,所述修正处理方式包括:若所确定出的属于亮条纹的像素行中存在相邻的像素行,将相邻的像素行进行像素行合并,得到属于亮条纹的一像素行,和/或,若所确定出的属于暗条纹的像素行中存在相邻的像素行,将相邻的像素行进行像素行合并,得到属于暗条纹的一像素行;
80、在所述修正处理后,计算属于亮条纹的像素行以及属于暗条纹的像素行的总行数,得到所述第一差值图像中符合横纹条件的像素行数,作为第一行数;
81、可选地,所述第二检测子模块,包括:
82、第三确定单元,用于根据所述第二差值图像的各个像素点的像素值,确定所述第二差值图像的各个像素点的像素类型;其中,所述像素类型包括第一类型或第二类型,所述第一类型和第二类型的像素点的亮暗程度不同,且第一类型的像素点的亮度高于第二类型的像素点的亮度;
83、第二统计单元,用于根据所述第二差值图像的各个像素点的像素类型,统计所述第二差值图像中符合横纹条件的像素行的行数,作为第二行数;
84、第四确定单元,用于若所述第二行数大于预设的第二行数阈值,将所述第二差值图像中存在横纹确定为第二检测结果,否则,将所述第二差值图像中不存在横纹确定为第二检测结果;
85、可选地,所述第三确定单元,包括:
86、第三确定子单元,用于针对所述第二差值图像的每一像素点,若该像素点的像素值满足第三条件,确定该像素点的像素类型为所述第一类型,若该像素点的像素值满足第四条件,确定该像素点的像素类型为所述第二类型;
87、其中,所述第三条件为大于第二像素阈值,所述第四条件为小于所述第二像素阈值的相反数;
88、可选地,所述第二统计单元,包括:
89、第二求和子单元,用于针对所述第二差值图像的每一像素行,对该像素行内的各个指定像素点对应的第一参考值进行求和,得到第二计算结果,若所得到的第二计算结果大于第二结果阈值,判定该像素行是属于亮条纹的像素行;若所得到的第二计算结果小于所述第二结果阈值的相反数,判定该像素行是属于暗条纹的像素行;
90、第四确定子单元,用于基于所确定出的属于亮条纹的像素行以及属于暗条纹的像素行,确定所述第二差值图像中符合横纹条件的像素行数,作为第二行数;
91、其中,所述指定像素点为具有像素类型的像素点,每一指定像素点对应的第一参考值为该像素点的像素类型的表征值,所述第一类型的表征值为正数,所述第二类型的表征值为所述第一类型的表征值的相反数;
92、可选地,所述第四确定子单元,还用于按照预定的修正处理方式,对所确定出的属于亮条纹的像素行以及属于暗条纹的像素行进行修正处理;其中,所述修正处理方式包括:若所确定出的属于亮条纹的像素行中存在相邻的像素行,将相邻的像素行进行像素行合并,得到属于亮条纹的一像素行,和/或,若所确定出的属于暗条纹的像素行中存在相邻的像素行,将相邻的像素行进行像素行合并,得到属于暗条纹的一像素行;
93、在所述修正处理后,计算属于亮条纹的像素行以及属于暗条纹的像素行的总行数,得到所述第二差值图像中符合横纹条件的像素行数,作为第二行数;
94、可选地,所述第一图像补偿模块,包括:
95、第一滤波子模块,用于基于第一滤波器,对所述第一差值图像进行滤波,得到第一备用图像;其中,所述第一滤波器用于去除横波的滤波器;
96、第一确定子模块,用于确定所述第一差值图像与所述第一备用图像的差值图像,作为第一补偿图像;
97、第二滤波子模块,用于基于第二滤波器,对所述第一补偿图像进行滤波,得到第一补偿值;其中,所述第二滤波器用于去除竖波的滤波器;
98、第一图像补偿子模块,用于基于所述第一补偿值,对所述目标红外图像进行时域维度的图像补偿,得到中间图像;
99、可选地,所述第二图像补偿模块,包括:
100、第三滤波子模块,用于基于第三滤波器,对所述中间图像进行滤波,得到第二备用图像,以及基于第四滤波器,对所述中间图像进行滤波,得到第三备用图像;其中,所述第三滤波器与所述第四滤波器为针对所述中间图像不同区域进行去除横纹的滤波器;
101、第二确定子模块,用于基于所述第二备用图像和所述第三备用图像,按照预定的确定方式,确定第二补偿图像;其中,所述预定的确定方式包括:针对所述中间图像的每一像素点,若所述第二备用图像中的、与该像素点相对应的第一像素点的像素值绝对值,小于所述第三备用图像中的、与该像素点相对应的第二像素点的像素值绝对值,将该像素点的初始补偿值,确定为与该像素点相对应的第一像素点的像素值,否则,将该像素点的初始补偿值,确定为与该像素点相对应的第二像素点的像素值,其中,与该像素点相对应的第一像素点以及第二像素点均为与该像素点位置匹配的像素点;
102、第四滤波子模块,用于利用第五滤波器,对所述第二补偿图像进行滤波,得到第二补偿值;其中,所述第五滤波器用于去除竖波的滤波器;
103、第二图像补偿子模块,用于基于所述第二补偿值,对所述中间图像进行在空域维度下的图像补偿,得到所述目标红外图像对应的去除横纹后的图像。
104、第三方面,本技术实施例提供了一种电子设备,包括:
105、存储器,用于存放计算机程序;
106、处理器,用于执行存储器上所存放的程序时,实现上述任一针对红外图像的图像处理方法。
107、第四方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述任一针对红外图像的图像处理方法。
108、本技术实施例有益效果:
109、本技术实施例提供的针对红外图像的图像处理方法,可以获取待处理的目标红外图像对应的第一差值图像以及第二差值图像,基于第一差值图像的各个像素点的像素值,确定目标红外图像的关于是否存在横纹的检测结果,得到时域维度下的检测结果,基于第二差值图像的各个像素点的像素值,确定目标红外图像的关于是否存在横纹的检测结果,得到空域维度下的检测结果,若时域维度下的检测结果以及空域维度的检测结果均表征存在横纹,对目标红外图像在时域维度下进行图像补偿,得到中间图像,再对中间图像在空域维度下进行图像补偿,得到目标红外图像对应的去除横纹后的图像。可见,本技术实施例采用时域维度、空域维度相结合的方式进行横纹检测,可以保证横纹检测结果的准确性;并且,在时域维度及空域维度都表征存在横纹时,再对目标红外图像进行时域维度、空域维度的图像补偿,使得补偿更加全面以及准确。因此,本技术实施例所采用的将横纹检测与图像补偿相结合的方式,可以对存在横纹的红外图像有效地进行横纹去除。
110、另外,对第一差值图像及第二差值图像进行横纹检测,也可以避免对不存在横纹的图像的细节产生损失,从而极大的提高了进行图像补偿后的图像的图像质量。
111、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!