一种涉水路面的识别方法、装置、系统和一种车辆与流程
本申请涉及路径识别,尤其涉及一种涉水路面的识别方法、装置、系统和一种车辆。
背景技术:
1、目前,无论是手动驾驶车辆还是自动驾驶车辆,都可以通过图像采集设备采集车辆行驶路径上的图像信息进行障碍物识别,以保障车辆安全行驶。但是,若车辆行驶路径上存在积水或者行驶路径被水体完全淹没,将无法精准识别出涉水路面,车辆贸然驶入涉水路面,可能造成车辆熄火而将乘员困于涉水路面,甚至造成汽车损害和人身伤亡事故。
2、因此,如何提高涉水路面识别的精准度,提高车辆驾驶安全性,是本领域技术人员目前需要解决的技术问题。
技术实现思路
1、本申请的目的在于提供一种涉水路面的识别方法、装置、终端设备、涉水路面的识别系统、车辆和计算机可读存储介质,旨在提高涉水路面识别的精准度,提高车辆驾驶安全性。
2、第一方面,本申请提供了一种涉水路面的识别方法。所述方法包括:
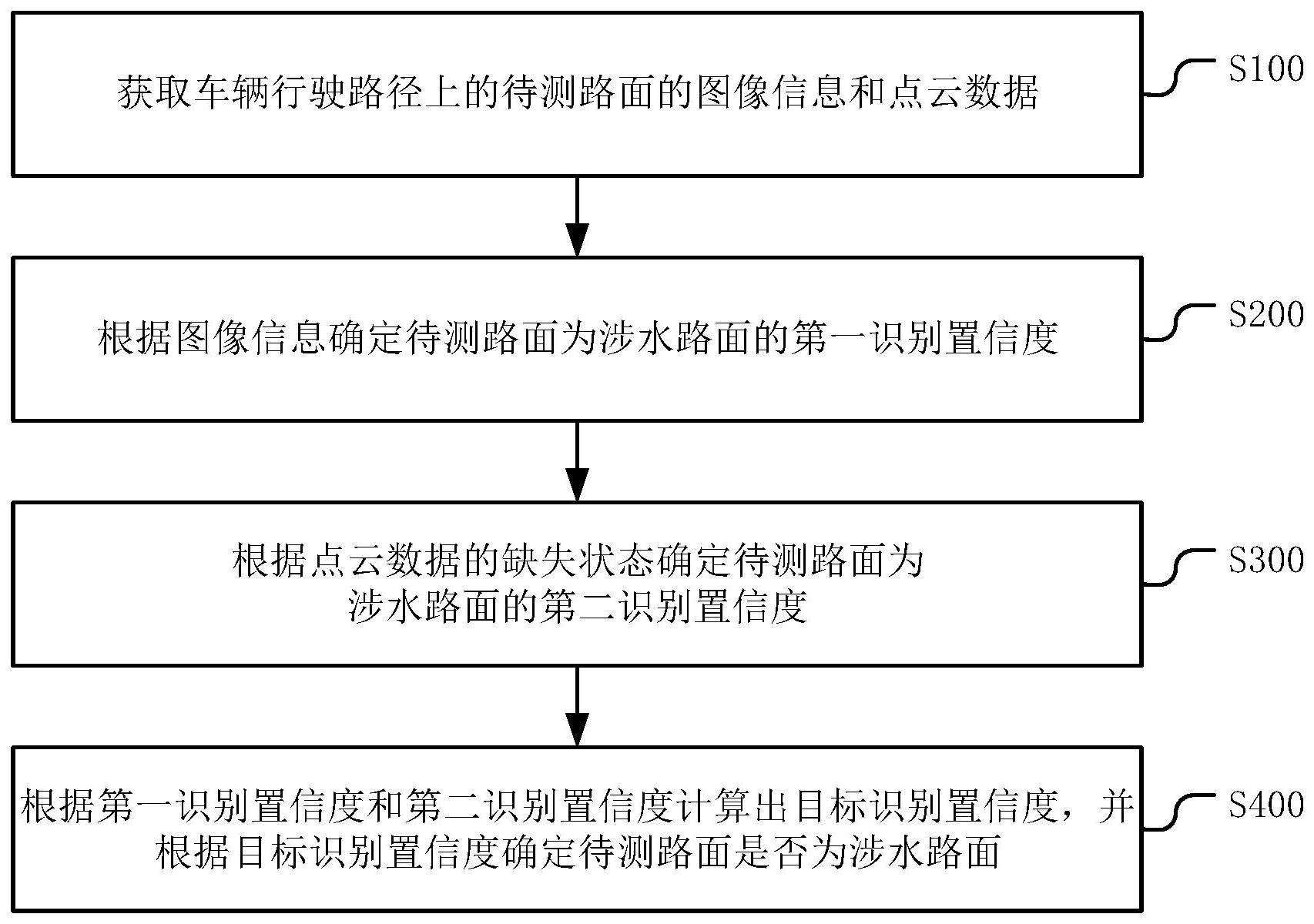
3、获取车辆行驶路径上的待测路面的图像信息和点云数据;
4、根据所述图像信息确定所述待测路面为涉水路面的第一识别置信度;
5、根据所述点云数据的缺失状态确定所述待测路面为所述涉水路面的第二识别置信度;
6、根据所述第一识别置信度和所述第二识别置信度计算出目标识别置信度,并根据所述目标识别置信度确定所述待测路面是否为所述涉水路面。
7、在其中一个实施例中,所述根据所述第一识别置信度和所述第二识别置信度计算出目标识别置信度,并根据所述目标识别置信度确定所述待测路面是否为所述涉水路面,包括:
8、获取所述车辆所处环境的当前光照强度;
9、根据所述当前光照强度确定与所述图像信息和所述点云数据分别对应的权重系数;
10、根据所述第一识别置信度、所述第二识别置信度和各所述权重系数计算出目标识别置信度,并在所述目标识别置信度大于判定阈值时,确定所述待测路面为所述涉水路面。
11、在其中一个实施例中,所述根据所述点云数据的缺失状态确定所述待测路面为所述涉水路面的第二识别置信度,包括:
12、确定所述点云数据的缺失位置和缺失数量;
13、根据所述缺失位置和所述缺失数量确定所述待测路面为所述涉水路面的第二识别置信度。
14、在其中一个实施例中,所述根据所述图像信息确定所述待测路面为涉水路面的第一识别置信度,包括:
15、将所述图像信息输入至图像识别模型中,利用所述图像识别模型输出所述待测路面为涉水路面的第一识别置信度;所述图像识别模型预先利用训练样本基于神经网络训练得出。
16、在其中一个实施例中,在确定所述待测路面为所述涉水路面后,所述方法还包括:
17、根据所述车辆的设备参数确定所述车辆的涉水深度阈值;所述设备参数包括所述车辆的允许最大涉水深度、车辆载荷导致的悬架位置变化量和悬架提升量最大值;
18、获取所述车辆的实时对地高度;所述实时对地高度为所述车辆后轴对地中心点与地面水平的距离;
19、若所述实时对地高度小于所述涉水深度阈值,控制所述车辆涉水行驶。
20、在其中一个实施例中,所述获取所述车辆的实时对地高度,包括:
21、获取用于采集所述点云数据的雷达的探测距离和探测方位角;
22、根据所述探测距离和所述探测方位确定所述雷达的雷达对地高度;
23、通过坐标系转换确定与所述雷达对地高度对应的所述车辆的实时对地高度。
24、在其中一个实施例中,若所述实时对地高度大于所述涉水深度阈值,所述方法还包括:
25、若确定所述车辆后方不存在障碍物,则控制所述车辆执行倒车循迹功能。
26、第二方面,本申请还提供了一种涉水路面的识别装置。所述装置包括:
27、获取模块,用于获取车辆行驶路径上的待测路面的图像信息和点云数据;
28、第一识别模块,用于根据所述图像信息确定所述待测路面为涉水路面的第一识别置信度;
29、第二识别模块,用于根据所述点云数据的缺失状态确定所述待测路面为所述涉水路面的第二识别置信度;
30、目标确定模块,用于根据所述第一识别置信度和所述第二识别置信度计算出目标识别置信度,并根据所述目标识别置信度确定所述待测路面是否为所述涉水路面。
31、第三方面,本申请还提供了一种终端设备。所述终端设备包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述方法的步骤。
32、第四方面,本申请还提供了一种涉水路面的识别系统,所述系统包括至少一个图像采集设备、至少一个雷达和控制器;
33、所述图像采集设备用于采集车辆行驶路径上的待测路面的图像信息,并将所述图像信息发送给所述控制器;
34、所述雷达用于采集所述车辆所述行驶路径上的所述待测路面的点云数据,并将所述点云数据发送给所述控制器;
35、所述控制器用于获取所述车辆所述行驶路径上的所述待测路面的所述图像信息和所述点云数据;根据所述图像信息确定所述待测路面为涉水路面的第一识别置信度;根据所述点云数据的缺失状态确定所述待测路面为所述涉水路面的第二识别置信度;根据所述第一识别置信度和所述第二识别置信度计算出目标识别置信度,并根据所述目标识别置信度确定所述待测路面是否为所述涉水路面。
36、第五方面,本申请还提供了一种车辆,包括车辆本体,还包括智能驾驶控制器,所述智能驾驶控制器执行如上述方法的步骤。
37、第六方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述方法的步骤。
38、本申请提供一种涉水路面的识别方法,由于若待测路面为涉水路面,则会导致点云数据缺失,本方法根据点云数据的缺失状态确定待测路面为涉水路面的第二识别置信度;然后根据图像信息确定出的第一识别置信度和第二识别置信度计算出目标识别置信度,以确定待测路面是否为涉水路面;根据图像信息和点云数据综合确定待测路面是否为涉水路面,能够高效精准地实现涉水路面的识别,提高车辆驾驶安全性。
39、可以理解的是,本申请实施例提供的一种涉水路面的识别装置、终端设备、涉水路面的识别系统、车辆和计算机可读存储介质,具有如上述涉水路面的识别方法相同的有益效果,在此不再赘述。
技术特征:
1.一种涉水路面的识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述第一识别置信度和所述第二识别置信度计算出目标识别置信度,并根据所述目标识别置信度确定所述待测路面是否为所述涉水路面,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述点云数据的缺失状态确定所述待测路面为所述涉水路面的第二识别置信度,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述图像信息确定所述待测路面为涉水路面的第一识别置信度,包括:
5.根据权利要求1至4任一项所述的方法,其特征在于,在确定所述待测路面为所述涉水路面后,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述获取所述车辆的实时对地高度,包括:
7.根据权利要求5所述的方法,其特征在于,若所述实时对地高度大于所述涉水深度阈值,所述方法还包括:
8.一种涉水路面的识别装置,其特征在于,所述装置包括:
9.一种涉水路面的识别系统,其特征在于,所述系统包括至少一个图像采集设备、至少一个雷达和控制器;
10.一种车辆,包括车辆本体,其特征在于,还包括智能驾驶控制器,所述智能驾驶控制器执行如权利要求1至7任一项所述方法的步骤。
技术总结
本申请提供一种涉水路面的识别方法、装置、系统和一种车辆,其方法包括:获取车辆行驶路径上的待测路面的图像信息和点云数据;根据图像信息确定待测路面为涉水路面的第一识别置信度;根据点云数据的缺失状态确定待测路面为涉水路面的第二识别置信度;根据第一识别置信度和第二识别置信度计算出目标识别置信度,并根据目标识别置信度确定待测路面是否为涉水路面。本方法能够高效精准地实现涉水路面的识别,提高车辆驾驶安全性。
技术研发人员:杨美玲,李冰涛
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!