基于回归模型的工业图像关键点检测方法、系统及平台与流程
本发明属于图像关键点检测处理,具体涉及一种基于回归模型的工业图像关键点检测方法、系统及平台。
背景技术:
1、现目前,对于传统的关键点检测算法,检测关键点自适应弱,无法实现从大量的数据中学习到不同样本的特征,从而导致关键点检测的准确性低。
2、此外,关键点的回归模型中,基本都用到了全局池化,但是全局池化会损失特征图的空间信息,导致模型对与关键点的位置信息难以区分。而且,一般关键点的回归模型会将所有类型的点都输出,不论某类点在图像中是否存在。图像中不存在的点也会检测出来,而且得分很高,不能通过阈值将图像中不可见的点筛选掉。
3、对于残差似然估计的关键点回归模型,通过流模型,估计出模型输出关节的分布概率密度。一旦估计出令人满意的先验分布函数就能动态优化损失函数,从而促进模型的回归训练。但是其输出的损失函数值在模型收敛的时候是负数,不直观,不能通过损失函数值判断模型训练过程的收敛情况。
4、因此,针对以上的技术问题缺陷,急需设计和开发一种基于回归模型的工业图像关键点检测方法、系统及平台。
技术实现思路
1、为克服上述现有技术存在的不足及困难,本发明之目的在于提供一种基于回归模型的工业图像关键点检测方法、系统、平台及存储介质,可以保留特征的全局空间信息,提高关键点预测的空间泛化性和稳定性。而且会可以实现关键点回归模型添加每个点的可见性功能。
2、本发明的第一目的在于提供一种基于回归模型的工业图像关键点检测方法;
3、本发明的第二目的在于提供一种基于回归模型的工业图像关键点检测系统;
4、本发明的第三目的在于提供一种基于回归模型的工业图像关键点检测平台;
5、本发明的第四目的在于提供一种计算机可读取存储介质;
6、本发明的第一目的是这样实现的:所述方法包括如下步骤:
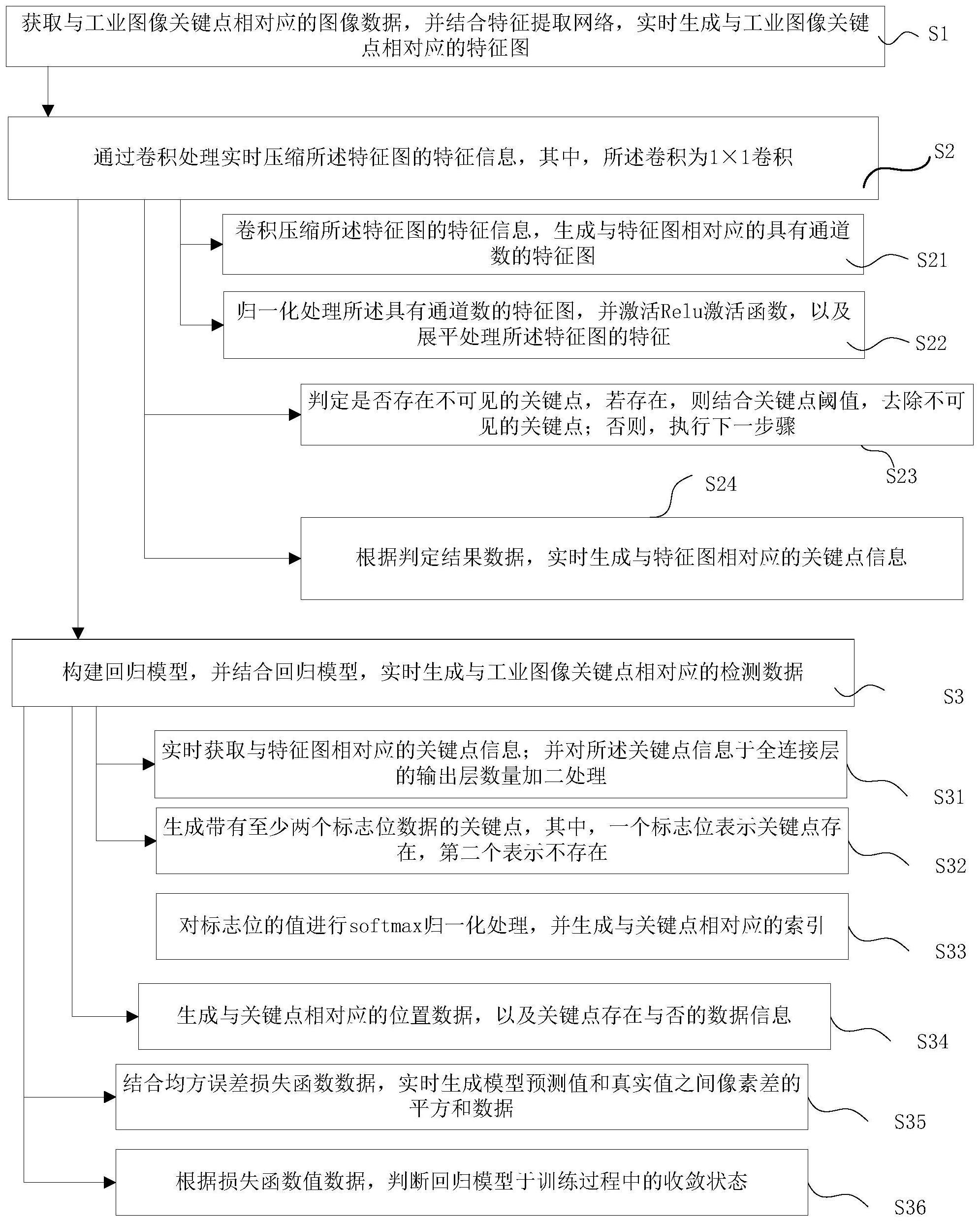
7、获取与工业图像关键点相对应的图像数据,并结合特征提取网络,实时生成与工业图像关键点相对应的特征图;
8、通过卷积处理实时压缩所述特征图的特征信息,其中,所述卷积为1×1卷积;
9、构建回归模型,并结合回归模型,实时生成与工业图像关键点相对应的检测数据。
10、进一步地,所述通过卷积处理实时压缩所述特征图的特征信息,其中,所述卷积为1×1卷积,还包括:
11、卷积压缩所述特征图的特征信息,生成与特征图相对应的具有通道数的特征图;
12、归一化处理所述具有通道数的特征图,并激活relu激活函数,以及展平处理所述特征图的特征。
13、进一步地,所述通过卷积处理实时压缩所述特征图的特征信息,其中,所述卷积为1×1卷积,还包括:
14、判定是否存在不可见的关键点,若存在,则结合关键点阈值,去除不可见的关键点;否则,执行下一步骤;
15、根据判定结果数据,实时生成与特征图相对应的关键点信息。
16、进一步地,所述构建回归模型,并结合回归模型,实时生成与工业图像关键点相对应的检测数据,还包括:
17、实时获取与特征图相对应的关键点信息;并对所述关键点信息于全连接层的输出层数量加二处理;
18、生成带有至少两个标志位数据的关键点,其中,一个标志位表示关键点存在,第二个表示不存在;
19、对标志位的值进行softmax归一化处理,并生成与关键点相对应的索引。
20、进一步地,所述构建回归模型,并结合回归模型,实时生成与工业图像关键点相对应的检测数据,还包括:
21、生成与关键点相对应的位置数据,以及关键点存在与否的数据信息。
22、进一步地,所述构建回归模型,并结合回归模型,实时生成与工业图像关键点相对应的检测数据,还包括:
23、结合均方误差损失函数数据,实时生成模型预测值和真实值之间像素差的平方和数据;
24、根据损失函数值数据,判断回归模型于训练过程中的收敛状态。
25、本发明的第二目的是这样实现的:所述系统包括:
26、获取生成单元,用于获取与工业图像关键点相对应的图像数据,并结合特征提取网络,实时生成与工业图像关键点相对应的特征图;
27、卷积处理单元,用于通过卷积处理实时压缩所述特征图的特征信息,其中,所述卷积为1×1卷积;
28、检测数据生成单元,用于构建回归模型,并结合回归模型,实时生成与工业图像关键点相对应的检测数据。
29、进一步地,所述卷积处理单元,还包括:
30、第一生成模块,用于卷积压缩所述特征图的特征信息,生成与特征图相对应的具有通道数的特征图;
31、第一处理模块,用于归一化处理所述具有通道数的特征图,并激活relu激活函数,以及展平处理所述特征图的特征;
32、和/或,所述卷积处理单元,还包括:
33、第一判定模块,用于判定是否存在不可见的关键点,若存在,则结合关键点阈值,去除不可见的关键点;否则,根据判定结果数据,实时生成与特征图相对应的关键点信息;
34、第二生成模块,用于根据判定结果数据,实时生成与特征图相对应的关键点信息;
35、所述检测数据生成单元,还包括:
36、第二处理模块,用于实时获取与特征图相对应的关键点信息;并对所述关键点信息于全连接层的输出层数量加二处理;
37、第三生成模块,用于生成带有至少两个标志位数据的关键点,其中,一个标志位表示关键点存在,第二个表示不存在;
38、第四生成模块,用于对标志位的值进行softmax归一化处理,并生成与关键点相对应的索引;
39、和/或,所述检测数据生成单元,还包括:
40、第五生成模块,用于生成与关键点相对应的位置数据,以及关键点存在与否的数据信息;
41、和/或,所述检测数据生成单元,还包括:
42、第六生成模块,用于结合均方误差损失函数数据,实时生成模型预测值和真实值之间像素差的平方和数据;
43、第二判定模块,用于根据损失函数值数据,判断回归模型于训练过程中的收敛状态。
44、本发明的第三目的是这样实现的:包括处理器、存储器以及基于回归模型的工业图像关键点检测平台控制程序;其中在所述的处理器执行所述的基于回归模型的工业图像关键点检测平台控制程序,所述的基于回归模型的工业图像关键点检测平台控制程序被存储在所述存储器中,所述的基于回归模型的工业图像关键点检测平台控制程序,实现所述的基于回归模型的工业图像关键点检测方法。
45、本发明的第四目的是这样实现的:所述计算机可读取存储介质存储有基于回归模型的工业图像关键点检测平台控制程序,所述的基于回归模型的工业图像关键点检测平台控制程序,实现所述的基于回归模型的工业图像关键点检测方法。
46、本发明通过方法获取与工业图像关键点相对应的图像数据,并结合特征提取网络,实时生成与工业图像关键点相对应的特征图;通过卷积处理实时压缩所述特征图的特征信息,其中,所述卷积为1×1卷积;构建回归模型,并结合回归模型,实时生成与工业图像关键点相对应的检测数据,以及与所述方法相应的系统、平台以及存储介质;可以保留特征的全局空间信息,提高关键点预测的空间泛化性和稳定性。而且会可以实现关键点回归模型添加每个点的可见性功能。
47、也就是说,基于回归模型的工业图像关键点检测算法比传统检测算法,可以让设备自动将工业图像中各种类型的关键点检测出来,并且各类点的平均像素误差可以控制在一个像素以内。比传统检测算法有更高的精度,并且消除了人工因为个体差异、身体状态等造成的主观因素对缺陷判断的影响,提高了检测的安全性、可靠性以及效率。比常见的关键点回归模型多出预测点可见性的功能,大幅降低常见关键点回归模型的平均过检率。
- 还没有人留言评论。精彩留言会获得点赞!