一种面向综合监管的海事巡航路径动态开辟方法及系统与流程
本发明属于海事空中巡航管理,具体涉及一种面向综合监管的海事巡航路径动态开辟方法及系统。
背景技术:
1、如何动态生成最佳路径,满足在有限投入条件下,同时兼顾监管水域覆盖更广阔、到达更深远等多个管理目标,是有效巡航的关键。
2、如公开号为cn111428916a的发明专利《一种海上救援船舶巡航路径规划方法》,针对应急场景,通过求解线性规划问题,提出了一种基于海洋环境数据可以确定救援船最优巡航路径的方法。公开号为cn113361765a的发明专利《一种船载无人机协同监测港口船舶大气污染路径规划的方法》,针对海上船舶对港口环境的污染,提供了一种船载无人机协同监测港口船舶大气污染路径规划的方法。曲小同等(2020年)以台州为实验水域,基于k-means算法选择了28个海上任务点,然后运用蚁群算法开展了水域日常和应急立体协同巡航监管路径规划研究。王力等(2019年)以烟台为实验水域,运用聚类获取重点巡航范围后,基于混合整数线性规划方法开展了无人机协同巡航模型研究。
3、已有算法均先基于需求或者聚类等算法确定巡航路径节点,将优化路径设计简化为传统的旅行商问题,即在可能连接节点的所有巡航路径中,选择代价最低且满足限制性条件的路径,亦即以最低的代价遍历所有接节点。这种方法忽略了巡航的过程性,点之间只有直线连接一种方式,是在有限解集对最优方案的选择。而面向综合监管的巡航路径规划中,为了最大化覆盖监管需求,往往需要根据全域需求覆盖情况,开辟新的路径,需要在优化路径设计时同步生成路径节点。目前的已有方法均不能实现节点的自动选择与新路径的开辟。
4、因此,如何在一定的约束条件下(如航程/航时约束、传感器性能约束、飞行安全距离约束等),根据水域实时监管需求,集合各监管力量(如飞机、船艇等)的巡航能力,将监管业务分配给不同的监管力量,是亟需解决问题。
技术实现思路
1、为实现本发明目的提供的一种面向综合监管的海事巡航路径动态开辟方法,包括:
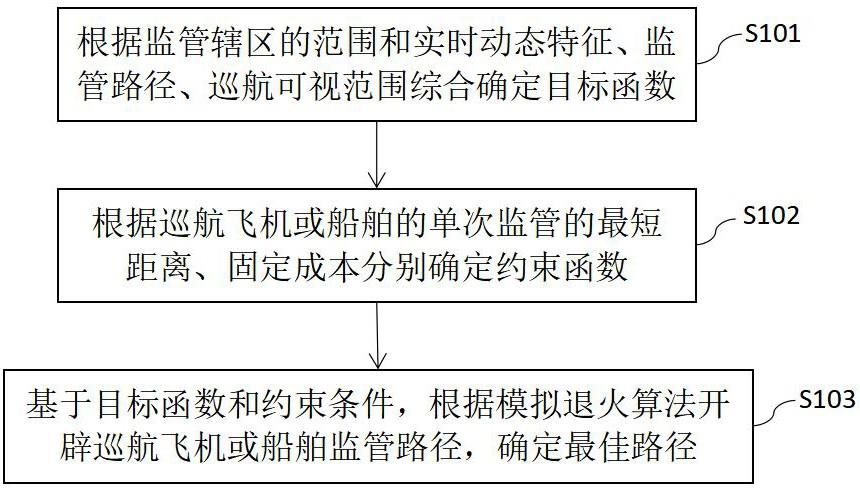
2、步骤s101:根据监管辖区的范围和实时动态特征、监管路径、巡航可视范围综合确定目标函数;
3、步骤s102:根据巡航飞机或船舶的单次监管的最短距离、固定成本分别确定约束条件;
4、步骤s103:基于目标函数和约束条件,在模拟退火算法的基础上开辟最佳巡航飞机或船舶监管路径,确定最大化满足监管需求的路径;
5、包括以下步骤s1031-s1035:
6、步骤s1031:设定预期路径个数,并初始化监管路径并设定初始参数;
7、步骤s1032:计算目标函数的初始值;
8、步骤s1033:根据空间扰动产生新的监管路线;
9、步骤s1034:根据metropolis准则计算对所述新的监管路线的接受概率,确定下一次选择的路线;
10、步骤s1035:判断当前路径是否是最佳路径,若是,则终止计算,并输出最佳路径;若不是,则重复步骤s1033-步骤s1035。
11、在其中一些具体实施例中,步骤s101还包括:对监管辖区的范围内的监管点进行动态网格离散处理,得到 n个监管点,综合确定目标函数为:
12、;
13、;
14、式中, pathes=(p1,p2,…,pk)为航线集合,表示监管辖区范围内海巡飞机或船舶分别的监管线路,其中, p i为第i条航线; d n为监管辖区的范围内的监管点需求总量; d n为在确定路径 pathes的情况下 n个监管点中未被满足的需求量; n为航线上航迹点的总数。
15、在其中一些具体实施例中,步骤s102中基于单个监管设施的单次监管的最短距离确定的约束条件l(p)为:
16、;
17、式中,a为单个飞机监管路径长度的公里数阈值;xj、yj分别为该点的经纬度坐标,xj-1、yj-1分别为当前点的前一个点的经纬度坐标,k为航线条数。
18、在其中一些具体实施例中,步骤s102中基于固定成本确定的约束条件cost为:
19、;
20、式中,b为固定成本; l1为飞机航线个数; l2为海巡船舶航线个数;pa为第 a个飞机航线;pc为第c个船舶航线;c1为巡航飞机每公里代价,c2为海巡船舶每公里代价。
21、在其中一些具体实施例中,步骤s1033包括:
22、选择当前路径 p cur中的一条路径 p i;其次,在 p i的k-2个中间节点中,随机选择 p i中任意一个监管点 sj,其空间坐标为( xj, yj),以随机的距离r和角度v扰动 sj的坐标位置产生新的空间坐标snew,所述新的空间坐标计算如下式所示:
23、;
24、;
25、再使用snew替换 sj,生成新的航线 pnew i,替换 p cur中的路径 p i,生成新的监管路线方案 pnew。
26、为实现本发明目的,本技术还提供了一种面向综合监管的海事巡航路径动态开辟系统,包括:
27、目标函数定义模块:用于根据监管辖区的范围和实时动态特征、监管路径、巡航可视范围综合确定目标函数;
28、约束函数生成模块:用于根据单个监管设施的单次监管的最短距离、固定成本分别确定约束条件;
29、最佳路径生成模块:用于基于所述目标函数和约束条件,根据模拟退火算法开辟巡航飞机或船舶监管路径,生成最佳路径;
30、所述最佳路径生成模块包括:
31、初始化单元:用于设定预期路径个数,并初始化监管路径并设定初始参数;
32、初始值计算单元:用于计算目标函数的初始值;
33、路线生成单元:用于根据空间扰动产生新的监管路线;
34、路线选择单元:用于根据metropolis准则计算对所述新的监管路线的接受概率,确定下一次选择的路线;
35、最佳路径确定单元:用于判断当前路径是否是最佳路径,若是,则终止计算,并输出最佳路径;若不是,则跳转至所述路径生成单元重新生成新的监管路线。
36、在其中一些具体实施例中,目标函数定义模块还用于:对监管辖区的范围内的监管点进行动态网格离散处理,得到 n个监管点,综合确定目标函数为:
37、;
38、;
39、式中, pathes=(p1,p2,…,pk)为航线集合,表示监管辖区范围内海巡飞机或船舶分别的监管线路,其中, p i为第i条航线; d n为监管辖区的范围内的监管点需求总量; d n为在确定路径 pathes的情况下 n个监管点中未被满足的需求量; n为航线上航迹点的总数。
40、在其中一些具体实施例中,约束函数生成模块用于基于单个监管设施的单次监管的最短距离确定的约束条件l(p)为:
41、;
42、式中,a为单个飞机监管路径长度的公里数阈值;xj、yj分别为该点的经纬度坐标,xj-1、yj-1分别为当前点的前一个点的经纬度坐标,k为航线条数。
43、在其中一些具体实施例中,约束函数生成模块用于基于固定成本确定的约束条件cost为:
44、;
45、式中,b为固定成本; l1为飞机航线个数; l2为海巡船舶航线个数; p a为第 a个飞机航线; p c为第 c个船舶航线;c1为巡航飞机每公里代价,c2为海巡船舶每公里代价。
46、在其中一些具体实施例中,路线生成单元用于按照以下方式产生新的监管路线:
47、选择当前路径 p cur中的一条路径 p i;其次,在 p i的k-2个中间节点中,随机选择 p i中任意一个监管点 sj,其空间坐标为( xj, yj),以随机的距离r和角度v扰动 sj的坐标位置产生新的空间坐标snew,所述新的空间坐标计算如下式所示:
48、;
49、;
50、再使用snew替换 sj,生成新的航线 pnew i,替换 p cur中的路径 p i,生成新的监管路线方案 pnew。
51、本发明的有益效果:
52、本发明的一种面向综合监管的海事巡航路径动态开辟方法及系统,根据辖区水域的实时动态监管需求,能够实时计算辖区监管力量的需求满足能力量化数值。并在给定投资和安全航行距离等约束条件下,开辟最佳的巡航推荐路径。
- 还没有人留言评论。精彩留言会获得点赞!