一种基于海底图像预测海底地质灾害的方法及系统与流程
本发明涉及海洋探测,具体涉及一种基于海底图像预测海底地质灾害的方法及系统。
背景技术:
1、为查明海洋油气管道、导管架平台等海洋设备设施环境,及时发现潜在的海底地质灾害,需要定期或不定期开展海洋工程勘察,了解海底地形地貌、海底障碍物,识别潜在地质灾害。其中海底表面的沙丘、沙坡、潮流沙脊、海底侵蚀与堆积、大面积滑动、沟谷地貌、珊瑚礁及贝壳集合体等是引起海洋地质灾害的重要因素。多波束、侧扫声纳是调查海底表面灾害地质的主要手段。
2、海洋工程勘察后,针对同一海洋项目现场,形成了多期海洋工程勘察测量成果资料,包括多波束水深图像、侧扫声纳图像。
3、目前,海洋工程勘察完成以后,大多通过解译当期图像方式,完成海底地形地貌、海底障碍物判读,识别潜在的海底地质灾害风险。综合利用历史图像数据,研究其海底灾害地质的演变规律,采用envi、erdas等变化检测软件开展变化检测研究与应用的较少。
4、当前,研究基于光学卫星遥感影像的变化检测(董臻.基于深度学习与哨兵一号影像的洪涝灾害遥感监测[d].南京信息工程大学,2022.doi:10.27248/d.cnki.gnjqc.2022.000979.)(陈洪瑞轩.深度特征学习驱动的高分辨率遥感影像变化检测研究[d].武汉大学,2022.doi:10.27379/d.cnki.gwhdu.2022.000134.)、(陈嘉浩.基于深度学习和多源遥感影像的建筑物变化检测方法研究[d].山东理工大学,2022.doi:10.27276/d.cnki.gsdgc.2022.000018.)、基于insar的变化检测(乐颖.联合多时相sar和光学遥感的稀土矿非法开采识别研究[d].东华理工大学,2022.doi:10.27145/d.cnki.ghddc.2022.000086.)、基于无人机航测遥感(高思岩.基于无人机遥感的建筑垃圾机器辨识与变化检测方法研究[d].北京建筑大学,2022.doi:10.26943/d.cnki.gbjzc.2022.000451.)的研究非常多,是当前的热门研究方向。但是海底图像,作为一种栅格图像,基于海底图像的变化检测技术,几乎没有技术人员研究攻关过。
5、现行的海底表面地质灾害识别方法的缺点:
6、(1)主要依靠当期完成的海洋勘察数据,解译海底灾害地质,没有结合往期历史数据对比,解译结果准确性有待进一步提升;
7、(2)没有结合往期历史数据对比,无法准确发现海底地质灾害的潜在演变规律,存在遗漏识别海底灾害地质的风险;
8、(3)当前,研究基于栅格影像的变化检测技术的非常多,没有运用到海底图像的数据处理与应用中,海洋地质灾害的识别手段与技术攻关有待进一步提升。
9、本发明的目的:
10、(1)将陆地的图像研究技术创新性应用于海底图像处理技术中,提供一种海底地质灾害识别的新思路;
11、(2)借助于往期海量的历史海底图像数据,采用专业的变化检测软件开展图像变化检测研究,发现沙丘、沙坡、潮流沙脊、海底侵蚀与堆积、大面积滑动、沟谷地貌、珊瑚礁及贝壳集合体等海底表面灾害地质的演变规律,预防海底地质灾害的发生。
技术实现思路
1、本发明的目的在于提供一种基于海底图像预测海底地质灾害的方法及系统。
2、为解决上述技术问题,本发明提供一种基于海底图像预测海底地质灾害的方法,包括以下步骤:
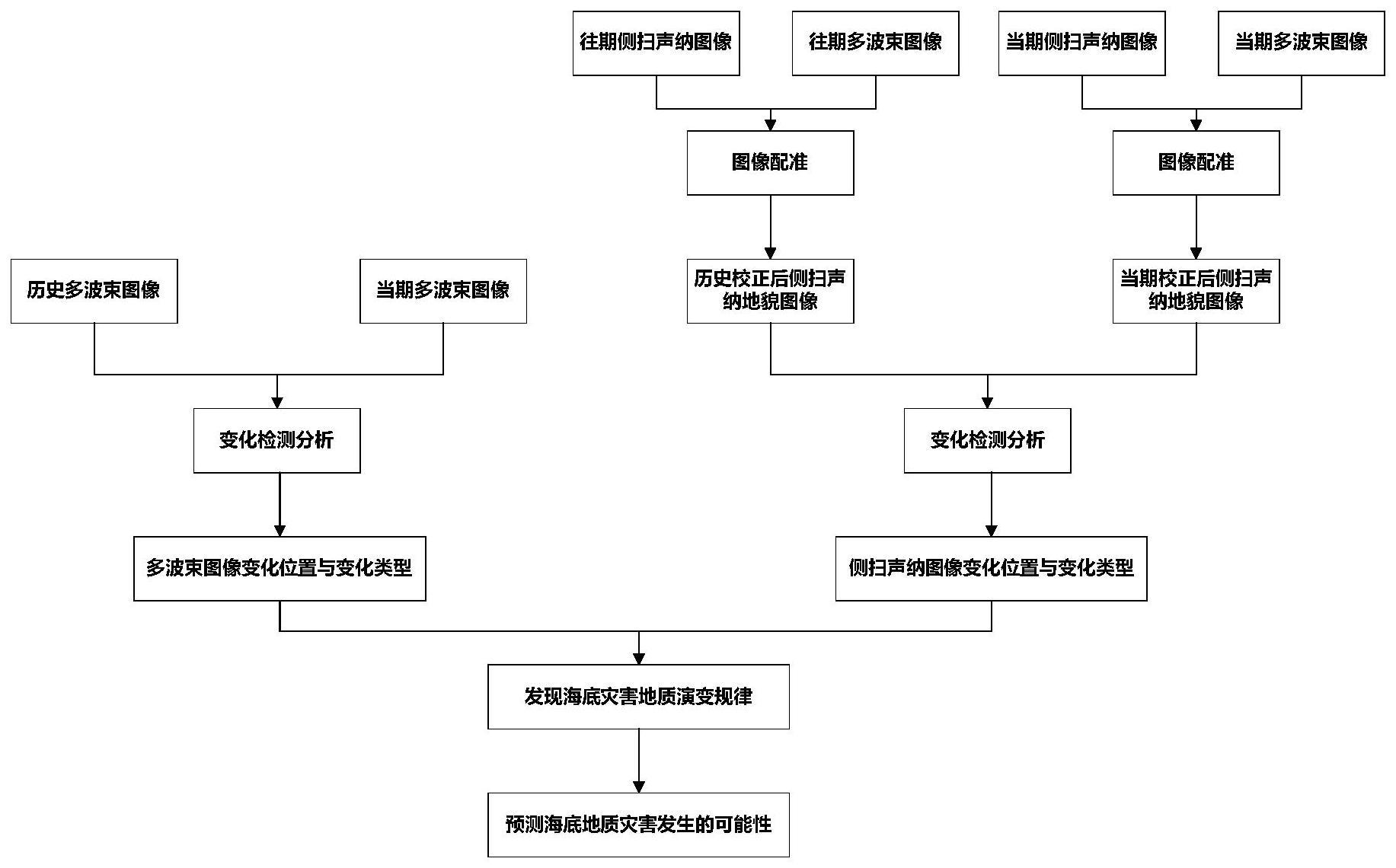
3、获取海底图像;所述海底图像包括多波束水深图像和侧扫声纳图像;
4、根据多波束水深图像对侧扫声纳地貌图像进行位置校正,得到校正后侧扫声纳地貌图像;
5、对多波束水深图像和校正后侧扫声纳地貌图像进行变化检测分析,得到多波束水深变化分析结果和侧扫声纳地貌变化分析结果;
6、根据多波束水深变化分析结果和侧扫声纳地貌变化分析结果,对海底图像预测海底地质灾害进行预测,得到预测结果。
7、优选地,根据多波束水深图像对侧扫声纳地貌图像进行位置校正,得到校正后侧扫声纳地貌图像,具体包括以下步骤:
8、从多波束水深图像和侧扫声纳图像中的像素点中提取出特征点;
9、计算特征点的主方向;
10、根据特征点的主方向,确定特征点的特征描述;
11、根据特征点的主方向和特征描述,从多波束水深图像和侧扫声纳图像的特征点中选取相同特征点;
12、根据相同特征点的主方向和特征描述,以多波束水深图像作为基准,对侧扫声纳图像进行图像配准。
13、优选地,从多波束水深图像和侧扫声纳图像中的像素点中提取出特征点,具体包括以下步骤:
14、任意选取多波束水深图像和侧扫声纳图像上的像素点p,像素点p的灰度值为tp;
15、以像素点p为圆心、半径为3个像素画圆,得到邻域s;
16、选取邻域s边缘上的16个像素点,作为邻域s边缘像素点;
17、计算圆心像素点p和邻域s边缘像素点的灰度值之差,若有9个邻域边缘上的像素点的灰度值都大于或小于像素点p的灰度值tp,则将该像素点p作为特征点。
18、优选地,计算特征点的主方向,具体包括以下步骤:
19、定义特征点的邻域s的矩mpq;所述特征点的邻域s的矩mpq的公式如下:
20、
21、式中:x、y表示横纵坐标,i(x,y)表示(x,y)处的灰度值;p和q分别是x维度和y维度上的矩;mpq表示邻域s的矩;
22、计算邻域s的质心c;所述质心c的公式如下:
23、c=(m10/m00,m01/m00)
24、式中:m00为零阶矩;m10、m01为一阶矩;
25、特征点与质心的夹角定义为该特征点的主方向θ;所述特征点的主方向θ的公式如下:
26、θ=arctan(m01/m10)。
27、优选地,根据特征点的主方向,确定特征点的特征描述,具体包括以下步骤:
28、以任意特征点为中心,选取大小为n×n的矩形区域p,基于二进制比较准则函数τ进行灰度值的比较;所述二进制比较准则函数τ的公式如下所示:
29、
30、式中:p(x)、p(y)分别是特征点x=(u1,v1)、y=(u2,v2)处的像素值;τ(p,x,y)是特征点xy的灰度值的比较结果;
31、在特征点附近选取n个点对,进行比较,得到长度为n的二进制串,作为特征描述子;所述特征描述子的公式如下所示:
32、
33、式中:xi、yi表示特征点i的横纵坐标;fn(p)表示特征描述子;
34、将特征点周围的n个点对组成2×n矩阵s;所述2×n矩阵s的公式如下:
35、
36、根据特征点方向θ的旋转矩阵rθ对2×n矩阵s进行旋转变换,得到新描述矩阵sθ;所述新描述矩阵sθ的公式如下:
37、sθ=rθs
38、根据新描述矩阵sθ和特征描述子,确定特征点的特征描述;所述特征点的特征描述的公式如下:
39、gn(p,θ)=fn(p)|(xi,yi)∈sθ
40、式中:gn(p,θ)表示特征点的特征描述。
41、优选地,对多波束水深图像和校正后侧扫声纳地貌图像进行变化检测分析,得到多波束水深变化分析结果和侧扫声纳地貌变化分析结果,具体包括以下步骤:
42、对多波束水深图像和校正后侧扫声纳地貌图像进行预处理,得到预处理后多波束水深图像和预处理后侧扫声纳地貌图像;
43、将预处理后多波束水深图像和预处理后侧扫声纳地貌图像输入训练完成的海底地物识别模型中,输出海底地形地貌类别区域;
44、将当期的预处理后多波束水深图像和预处理后侧扫声纳地貌图像的海底地形地貌类别区域,与上一期的预处理后多波束水深图像和预处理后侧扫声纳地貌图像的海底地形地貌类别区域进行时序性的变化检测,得到多波束水深变化分析结果和侧扫声纳地貌变化分析结果。
45、优选地,将当期的预处理后多波束水深图像和预处理后侧扫声纳地貌图像的海底地形地貌类别区域,与上一期的预处理后多波束水深图像和预处理后侧扫声纳地貌图像的海底地形地貌类别区域进行时序性的变化检测,得到多波束水深变化分析结果和侧扫声纳地貌变化分析结果,具体包括以下步骤:
46、赋予海底地形地貌类别区域栅格值;
47、在当期的预处理后多波束水深图像和预处理后侧扫声纳地貌图像的海底地形地貌类别区域的栅格值,与上一期的预处理后多波束水深图像和预处理后侧扫声纳地貌图像的海底地形地貌类别区域的栅格值相同时,变化分析结果为未发生地物类型变化;
48、在当期的预处理后多波束水深图像和预处理后侧扫声纳地貌图像的海底地形地貌类别区域的栅格值,与上一期的预处理后多波束水深图像和预处理后侧扫声纳地貌图像的海底地形地貌类别区域的栅格值不相同时,变化分析结果为发生了地物类型变化。
49、优选地,所述预处理包括栅格大小一致性处理和图像裁剪处理。
50、本发明还提供一种基于海底图像预测海底地质灾害的系统,包括:
51、获取模块,用于获取海底图像;所述海底图像包括多波束水深图像和侧扫声纳图像;
52、校正模块,用于根据多波束水深图像对侧扫声纳地貌图像进行位置校正,得到校正后侧扫声纳地貌图像;
53、变化分析模块,用于对多波束水深图像和校正后侧扫声纳地貌图像进行变化检测分析,得到多波束水深变化分析结果和侧扫声纳地貌变化分析结果;
54、预测模块,用于根据多波束水深变化分析结果和侧扫声纳地貌变化分析结果,对海底图像预测海底地质灾害进行预测,得到预测结果。
55、与现有技术相比,本发明的有益效果为:
56、1)、本发明首次提出了将基于图像的变化检测技术应用于海底图像处理中,是一种新的应用创新,给海洋勘察数据处理提供了新的技术攻关方向;
57、2)、本发明首次提出了一种海底地质灾害识别的方法,有助于识别逐渐演化过程中的海底灾害地质,降低海底地质灾害发生的可能性。
- 还没有人留言评论。精彩留言会获得点赞!