电力二次屏柜空开的图像检测装置与检测方法
本发明涉及二次屏柜空气开关检测领域,特别涉及电力二次屏柜空开的图像检测方法与装置。
背景技术:
1、二次屏柜在电力系统枢纽起到至关重要的保护作用,在电路出现异常时,屏柜装置触发保护响应,及时断开电路,避免人员受伤、财产损失。空气开关是屏柜起保护作用的关键因素,当电路中的物理特性超过了空开的允许范围,空气开关跳闸,屏柜控制元器件检测到空开的异常,触发相应的保护措施,完成对电路和工作人员的保护。空开上的型号及特性信息代表着空开保护性能,如果出现印刷错误,会导致空气开关的错误使用,可能会导致保护措施的误触发或者不触发,容易出现危险。
2、目前对于屏柜出厂前空开处信息的检测,都以人工检测方式;空气开关位于屏柜最上面,而且空开上的特性及型号信息印字特别小,为检测带来了很大的麻烦,工人在检测需要拿着强光手电照在空开上,站在垫高物上挨个比对检测,长时间的检测会引起工人的视觉疲劳,从而导致漏检、误检现象,而且不留神容易从垫高物上摔落下来,因此屏柜空开的自动化检测具有极其重要的意义。
技术实现思路
1、为了解决人工检测效率低、漏检误检现象,本发明提供一种能够在较少人工参与和干预下完成二次屏空开的自动化检测的方法和装置,包括:
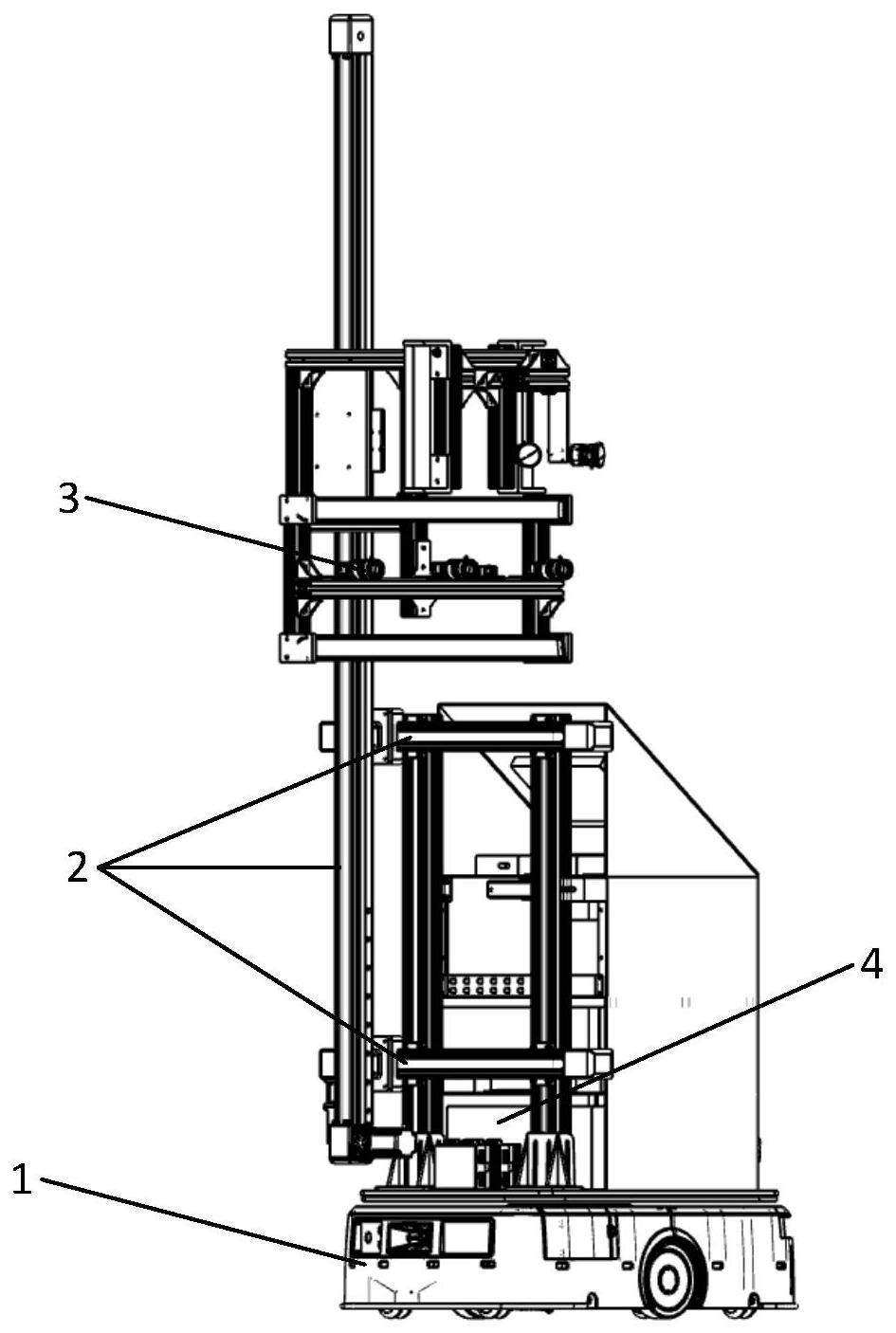
2、一种电力二次屏柜空开的图像检测装置,包括agv小车(1),所述的agv小车(1)上设置有同步带模组(2)、图像采集机构(3)、工控机(4);所述的同步带模组(2),由两根水平同步带、一根竖直同步带组成;两个水平同步带通过联轴器连接,并将其固定到型材上,型材固定到agv(1)的安装板上;竖直同步带固定到两水平同步带上; 所述的图像采集机构(3)主体由型材搭建而成,型材上钻有固定孔,将其固定到固定板上,再将固定板安装到同步带模组(2)的竖直同步带滑座上,图像采集机构(3)便可跟随同步带模组(2)组进行移动;将待检测屏柜摆放在工位上,agv小车(1)携带上装运动到屏柜后面,agv小车(1)到位后,竖直同步带(2)携带着图像采集机构(3)向上运动固定距离,达到空气开关所在区域。
3、本发明中的水平三相机(301)有三台相机组成,由于空开型号及特性文字较小,而且空开数量不一定,一个相机难以在保持高精度情况下,采集完整所有的空开,所以布置了3台相机,为了避免漏采集,布置相机间距小于相机视野的宽度,所有相邻相机之间采集的图像存在一定的重叠区域;竖直两条形光源(303)、水平两条形光源(305)由4根条形光源组成,用于补光,使采集原始图像亮度尽量保持一致。激光测距传感器(304),用于测量相机(301)与屏柜之间的距离,看是否到达了相机工作距离。
4、进一步,所述的图像采集机构(3)包括水平三相机(301)、竖直两相机(302)、竖直两条形光源(303)、激光测距传感器(304)、水平两条形光源(305);所述水平三相机(301)布置在一根水平型材上,两两间距为280mm,小于相机视野宽度300mm,镜头垂直于屏柜表面,用于采集屏柜上大部分特征的原始图像;水平两条形光源(305)以水平三相机(301)为对称轴,与相机间距为120mm对称布置,为水平三相机(301)打光;激光测距传感器(304)与水平三相机(301)布置在同一水型材上,用于测量屏柜表面与水平三相机距离;竖直两相机(302)布置在水平三相机(301)上方240mm、前方250mm处,竖直两相机(302)与竖直平面呈30度夹角,竖直两相机(302)用于采集与屏柜表面倾斜布置的特殊特征;竖直两条形光源(303)分别布置在竖直两相机(302)后150mm处,为竖直两相机(302)打光。
5、进一步,所述的水平三相机(301)、竖直两相机(302)、竖直两条形光源(303)、激光测距传感器(304)、水平两条形光源(305)通过连接件固定到图像采集机构(3)的型材架上;所述的激光测距传感器(304)测量水平三相机(301)与屏柜之间的距离,同步带模组(2)的水平同步带运动,携带着图像采集机构(3)到达水平三相机(301)的工作距离,完成空开区域的图像采集;竖直同步带和水平同步带由2个86步进电机分别驱动。
6、进一步,所述的agv小车(1)上四周钻有固定孔,固定孔固定安装板,然后再将采集检测上装固定到安装板上;当接收到检测任务后,agv小车承载着检测上装,开始向待检测屏柜后方移动。
7、本发明还公开了一种电力二次屏柜空开的图像检测装置的检测方法,其特征在于,所述的方法为:
8、步骤一、agv小车承载着同步带模组模块、图像采集机构和工控机达到待检测屏柜后面,竖直同步带向上运动固定距离,将采集机构(3)携带到空气开关所在区域;
9、步骤二、水平同步带模组运动,将水平三相机带到其工作距离,完成图像采集;
10、步骤三、工控机对水平三相机采集的三幅图像进行处理,利用阈值分割,提取空开上面的标签,并识别其上面的文字,然后进行去重保留,利用保留标签的位置信息,提取每幅图像中不重复的部分,然后利用模板匹配结合非极大值抑制方法,从不重复空开图像中,提取出单个空开;通过图像水平投影算法及矩阵数值遍历算法,从单个空开图像中准确地提取出空开的具体特性信息图像;
11、步骤四、空开的自动检测;对提取后的单个空开的图像进行处理,提取出含有空开型号、特性信息的图像,进行识别;将识别得到的每个空开上方标签、空开型号及特性结果与其标准信息进行比对,完成空开的自动化检测。
12、进一步,所述的步骤二具体为:
13、竖直同步带运动结束后,激光测距传感器(304)开始工作,测量水平三相机(301)与屏柜之间的距离,工控机(4)通过串口协议采集得到该距离信息,并计算测得的距离信息与水平三相机(301)工作距离的差值,工控机(4)将该距离差值发布到运动控制卡中,运动控制卡将该行程信息转换为脉冲信号发布到水平同步带驱动器上,水平同步带开始携带着图像采集模块(3)到达相应位置,相机到达其工作距离,水平两条形光源(305)以上50下20的亮度开始打光,完成图像采集。
14、进一步,所述的步骤三具体为:
15、工控机(4)利用图像处理算法,对水平三相机(301)采集的图像进行处理,在hsv色域下利用阈值分割方法,提取得到绿底黑字的空开标签,然后进行识别,将识别结果进行去重保留;
16、依据每幅图像中不重复标签的位置信息及空开本体与标签的相对距离,提取得到不重复的空开图像,然后利用模板匹配方法,提取出单个空开。
17、进一步,所述的步骤三中:
18、工控机(4)接收到图像,开始进行处理,图像中空气开关上面的标签为绿底黑字,将图像转换到hsv色域下,利用阈值分割,将绿底标签单独分割出来,分割出来的轮廓由于黑字的原因存在小的间隙,使用形态学闭运算,连通各个小区域,使单个标签成为一个完整连通区域;利用轮廓筛选算法,筛选出各个标签轮廓;由于水平三相机(301)采集的图像之间存在重复,所以三幅图像之间的标签轮廓也存在重复,将处在图像边缘的完整标签轮廓过滤掉,到相邻相机图像中进行提取保存,这样可以先进行一次去重;然后将按照轮廓在图像中x方向的坐标进行保存;将提取保存的轮廓导入到开源ocr算法中,进行识别,将识别结果进行去重比对,如果和已有的识别相同,则认为重复直接丢弃,如果是新的识别结果,则保留标签的识别结果及标签在图像上的位置信息,完成空开标签的识别及去重。
19、进一步,通过保留的空开标签位置信息以及标签与空开本体的相对距离,可在采集的原始图像中,提取出不重复的空开图像;根据屏柜的使用场景不同,空开分为交流保护空开和直流保护空开,两种特性的空开上面都有一样的标识特征,只不过处在空开上的位置不同;
20、根据空开的标识特征,预先建立模板,然后利用模板匹配算法,在不重复的空开图像中进行搜索匹配,由于标识周围匹配结果都大于设定的阈值,一个空开会搜索匹配到多个定位位置,利用非极大值抑制算法,找到标识区域局部的极大值,并抑制领域内的其余的值,得到匹配结果极大值在图像中的定位位置,完成单个空开在图像中的定位与提取。
21、进一步,所述的步骤四中,利用模板匹配及非极大值抑制方法,在图像中定位并提取到每个空开,空开的型号、特性信息各自成一行分布在标识下的固定区域内,但是由于印刷问题,空开的型号、特性信息上下位置存在一点浮动采用图像水平投影算法解决浮动;
22、所述的图像水平投影算法为:
23、首先对图像进行预处理,包括噪声去除、灰度化和二值化操作,以提高待提取特征质量;
24、然后,通过水平投影,将图像的像素值在水平方向上进行统计,并生成一维水平投影结果矩阵;
25、接着,运用矩阵数值遍历算法,遍历该一维投影结果矩阵,更改水平投影结果矩阵中的数值,将结果矩阵中大于设定阈值的部分像素设定为255,小于该阈值的部分像素设定为0;
26、然后利用差分法,求解更改后的一维投影矩阵中离散像素值的变化率,变化率不为0的位置为投影结果矩阵中像素值突变的地方,即为文字信息区域,相邻的两个位置坐标即为一行文字的y方向的起止位置;
27、得到空开型号、特性信息文字在y方向的定位坐标后,以x方向起始为0,定宽提取空开型号及特性信息图像,导入到开源光学字符识别算法中,便可得到结果;将识别得到的空开上标签、空开型号及特性信息结果与每个空开的标准信息比对,完成空开检测。
28、本发明相对于现有技术的有益效果是:本发明通过agv小车、图像采集机构、和同步带模组相配合,可以在较少人工参与和干预下完成待检测屏柜空气开关图像的采集,然后通过色域转换、阈值分割、形态学闭运算及轮廓筛选,提取得到空气开关上的标签,通过开源文字识别算法,得到标签的识别结果,并去重保存;利用保留标签位置信息及标签与空开间固定的相对距离,从图像中提取出不重复的空开图像;利用模板匹配,定位到每个空开,根据空开特性、型号文字信息的印刷特点,本案提出了一种图像水平投影算法,并结合矩阵数值遍历法、差分计算,求解得到每行文字信息在y方向的起止位置,然后以x方向起始为0,定宽提取空开型号及特性信息图像,导入到开源光学字符识别算法中,便可得到结果;将识别得到的空开上标签、空开型号及特性信息结果与每个空开的标准信息比对,完成空开的自动化检测。
- 还没有人留言评论。精彩留言会获得点赞!