一种基于多特征点点集的点云配准方法及系统
本发明涉及点云配准领域,尤其涉及一种基于多特征点点集的点云配准方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、点云(point cloud)是在特定坐标系中,表示某个对象空间分布和表面特性的离散点数据集。点云包含丰富的测量信息,包括目标对象的三维坐标值(xyz)、颜色(rgb)、激光反射强度(intensity)等,还具有无序性、置换不变性、旋转不变性。正因为点云数据具备以上特性,随着计算机和传感器技术的发展,点云数据处理技术应用范围不断扩大,深入到自动驾驶、精密测量、地理测绘、文物保护和医疗等领域。根据测量范围和应用的不同,点云获取方式也不尽相同,主要是接触式扫描仪、光学扫描仪以及立体视觉等,另外还可以通过三维模型获取点云。
3、点云配准是点云数据处理的关键步骤之一,主要是解决对齐点云和目标点云之间的空间位置变化问题,可以分为粗配准(coarse registration)和精配准(fineregistration)两个阶段。粗配准是指在点云相对位姿完全未知的情况下对点云进行配准,可以为精配准提供良好的初始值。精配准根据粗配准的结果,一般经过迭代计算减小点云之间的空间位置差别。通过提高配准的准确性,可以更好地呈现点云对象位置结果,从而提高后续任务的性能和精度。
4、但是,目前的点云配准方法不仅配准误差较大,而且配准时间较长,越来越不能满足现在各个领域对点云配准的需求。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供一种基于多特征点点集的点云配准方法及系统,有效提升了点云匹配的准确性和效率,降低了配准时间。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种基于多特征点点集的点云配准方法。
4、一种基于多特征点点集的点云配准方法,包括:
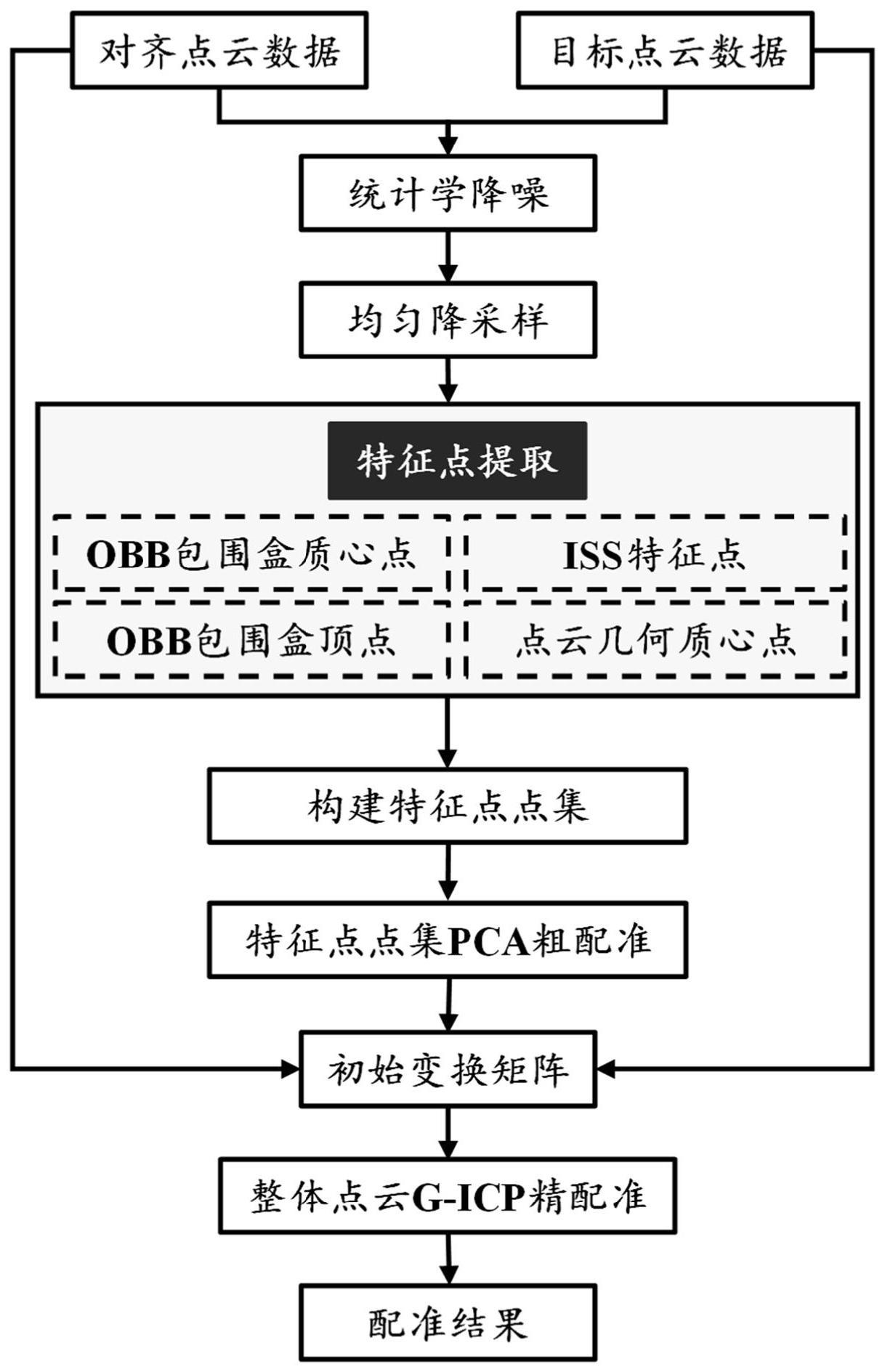
5、获取对齐点云数据和目标点云数据,并对对齐点云数据和目标点云数据进行预处理;
6、提取对齐点云数据的obb包围盒的顶点和中心点,以及目标点云数据obb包围盒的顶点和中心点;基于对齐点云数据,构建混合型k-d树,提取每个点的fpfh特征,构建fpfh矩阵,计算fpfh矩阵的均值和标准差,根据均值和标准差,调整iss算法的参数;采用优化后的iss算法,提取对齐点云数据的iss特征点;采用同样的方法得到目标点云数据的iss特征点;分别提取对齐点云数据的几何质心点和目标点云数据的几何质心点;
7、选取对齐点云数据的obb包围盒的顶点和中心点、对齐点云数据的iss特征点以及对齐点云数据的几何质心点中的至少一种数据,构建第一特征点点集;选取目标点云数据的obb包围盒的顶点和中心点、目标点云数据的iss特征点以及目标点云数据的几何质心点中的至少一种数据,构建第二特征点点集;
8、基于第一特征点点集、第二特征点点集、对齐点云数据和目标点云数据,依次进行粗配准和精配准。
9、进一步地,所述进行预处理的过程包括:对对齐点云数据和目标点云数据均进行高斯分布的统计学降噪处理。
10、进一步地,所述进行预处理的过程还包括:对对齐点云数据和目标点云数据均进行体素下采样处理。
11、进一步地,所述计算fpfh矩阵的均值和标准差之后还包括:
12、若均值大于等于1,则读取均值小数点前的位数记为n1,均值更新为μ’=μ/10n1;若均值值小于1,则读取均值的小数点与第一位非零值之间位数记为m1,均值更新为μ’=μ/10-m1;
13、若标准差σ大于等于1,则读取均值小数点前的位数记为n2,标准差更新为σ’=σ/10n2;若标准差小于1,则读取均值的小数点与第一位非零值之间位数记为m2,标准差更新为σ’=σ/10-m2;
14、得到更新后的均值和标准差。
15、更进一步地,所述根据均值和标准差,调整iss算法的参数的过程包括:
16、判断γ12=μ’+σ’的值是否大于1;
17、若γ12大于1,则判断μ’和σ’较大的数;
18、当μ’大于σ’时,带入公式μ’=μ’/10进行迭代;
19、当μ’小于等于σ’时,带入公式σ’=σ’/10进行迭代;
20、将迭代后的数据再次带入公式γ12=μ’+σ’后,判断γ12是否大于1;若γ12不大于1,则不做改变;
21、根据γ12=μ’+σ’和γ23=σ’,得到调整后的iss算法的参数;
22、其中,γ12和γ23均为iss算法的参数。
23、进一步地,所述进行粗配准的过程包括:
24、将第一特征点点集和第二特征点点集均转化为第一特征点矩阵和第二特征点矩阵;
25、计算第一特征点矩阵的均值和协方差矩阵,以及第二特征点矩阵的均值和协方差矩阵;
26、采用奇异值分解算法,得到协方差矩阵的特征值和特征向量,返回特征向量和质心;
27、根据不同的主轴方向进行迭代计算配准误差,最终选择误差最小的变换矩阵作为最终的点云配准结果。
28、进一步地,进行所述精配准的过程包括:基于对齐点云数据和目标点云数据,采用g-icp算法,结合粗配准确定的误差最小的变换矩阵,进行精配准,得到对齐点云数据、目标点云数据、第一特征点点集、第二特征点点集的配准结果。
29、本发明的第二个方面提供一种基于多特征点点集的点云配准系统。
30、一种基于多特征点点集的点云配准系统,包括:
31、数据获取模块,其被配置为:获取对齐点云数据和目标点云数据,并对对齐点云数据和目标点云数据进行预处理;
32、特征点提取模块,其被配置为:提取对齐点云数据的obb包围盒的顶点和中心点,以及目标点云数据obb包围盒的顶点和中心点;基于对齐点云数据,构建混合型k-d树,提取每个点的fpfh特征,构建fpfh矩阵,计算fpfh矩阵的均值和标准差,根据均值和标准差,调整iss算法的参数;采用优化后的iss算法,提取对齐点云数据的iss特征点;采用同样的方法得到目标点云数据的iss特征点;分别提取对齐点云数据的几何质心点和目标点云数据的几何质心点;
33、点集构建模块,其被配置为:选取对齐点云数据的obb包围盒的顶点和中心点、对齐点云数据的iss特征点以及对齐点云数据的几何质心点中的至少一种数据,构建第一特征点点集;选取目标点云数据的obb包围盒的顶点和中心点、目标点云数据的iss特征点以及目标点云数据的几何质心点中的至少一种数据,构建第二特征点点集;
34、配准模块,其被配置为:基于第一特征点点集、第二特征点点集、对齐点云数据和目标点云数据,依次进行粗配准和精配准。
35、本发明的第三个方面提供一种计算机可读存储介质。
36、一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述第一个方面所述的基于多特征点点集的点云配准方法中的步骤。
37、本发明的第四个方面提供一种计算机设备。
38、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述第一个方面所述的基于多特征点点集的点云配准方法中的步骤。
39、与现有技术相比,本发明的有益效果是:
40、本发明采用基于高斯分布的统计学降噪和体素下采样算法,在保证原点云结构特征的情况下,有效去除离群点噪声,减小数据量,提高处理效率。
41、本发明建立提取iss(intrinsic shape signature)特征点的自适应参数模型,基于点云的快速点特征直方图(fast point feature histograms,fpfh)特征和平均密度,对算法中的阈值和邻域半径进行自适应设置,为本发明中的后续配准过程提供有效的iss特征点;本发明采用多特征点点集粗配准与整体点云精配准的方法,通过提取obb(orientedbounding bix)包围盒特征点、点云质心以及iss特征点,选取多种特征点形成点集后进行粗配准,为整体的精配准提供初始配准矩阵,能够降低配准的数据处理量,提高配准收敛性和效率,减小配准误差。
- 还没有人留言评论。精彩留言会获得点赞!