焊印检测系统和焊印检测方法与流程
本技术属于检测,特别是涉及一种焊印检测系统和焊印检测方法。
背景技术:
1、方壳铝电池是动力电池的主要类型,方壳铝电池的电芯在入壳预点焊后,需要对电池顶盖进行激光满焊封装,形成顶盖焊印,且电池铝壳注入电解液后需要对注液口进行密封钉激光焊接密封,形成密封钉焊印。两次焊接均需得到无外观不良的焊印。
2、焊印的外观检测可以通过视觉检测方法实现,常见的视觉检测方法有二维(two-dimensional,2d)视觉,可以通过电荷耦合元件(charge coupled device,ccd)相机对焊印进行曝光拍照得到2d图像,由计算机程序识别2d图像中的焊印外观状态,得到检测结果。
3、但是,2d视觉采集的2d图像可能存在一些过曝光形成的噪点像素或欠曝光形成的无效像素,导致检测结果准确度低。
技术实现思路
1、本技术提供一种焊印检测系统和焊印检测方法,以解决现有技术中的焊印检测结果准确度低的技术问题。
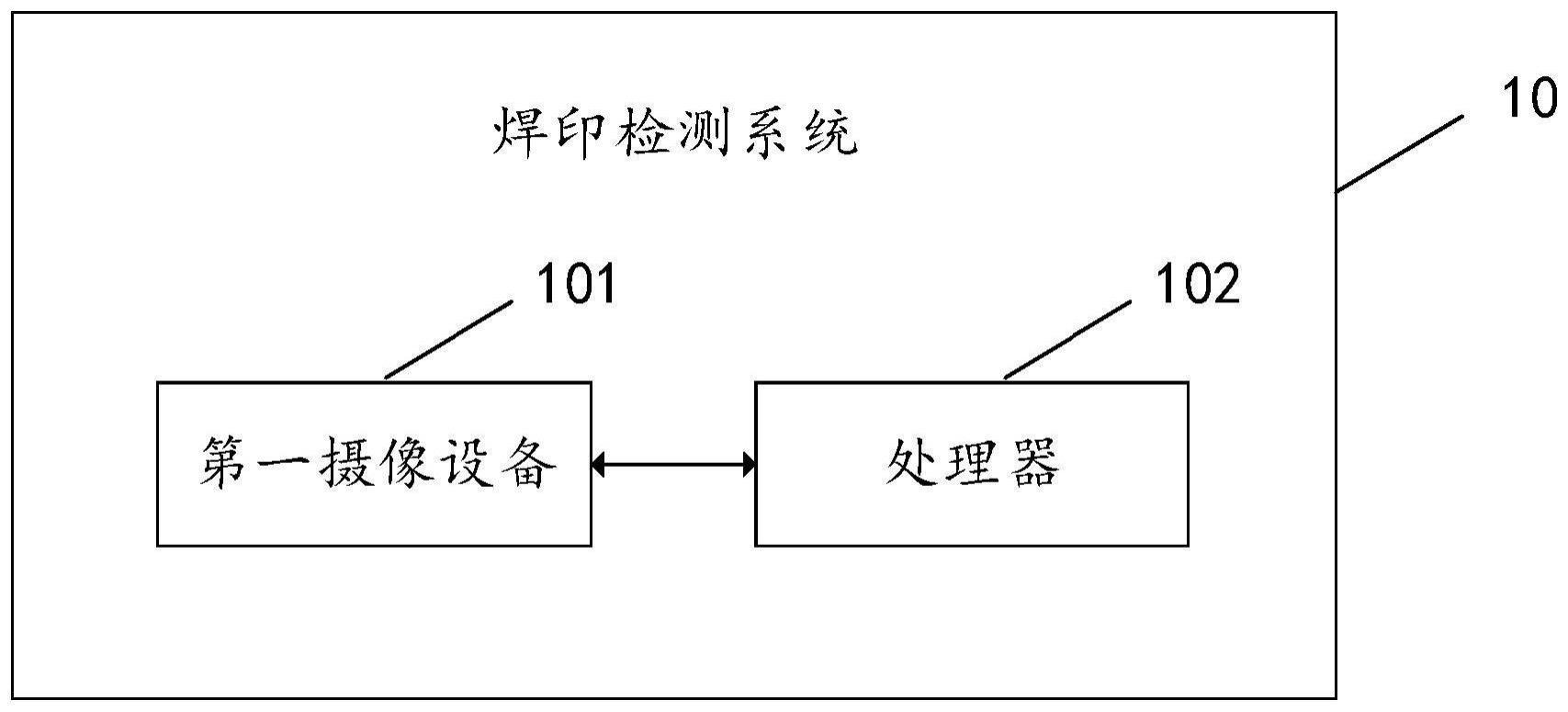
2、第一方面,本技术实施例提供一种焊印检测系统,所述系统包括第一摄像设备和处理设备,所述第一摄像设备与所述处理设备通信连接;
3、所述第一摄像设备用于,获取待测焊印区的至少两次曝光的二维图像,并将所述至少两次曝光的二维图像发送给所述处理设备;所述至少两次曝光的二维图像包括不同曝光度下的二维图像;
4、所述处理设备用于,基于所述不同曝光度下的二维图像进行融合以去除异常像素点,获得目标二维图像,以及根据所述目标二维图像,确定所述待测焊印区的检测结果。
5、可选的,所述第一摄像设备具体用于,获取所述待测焊印区的第一曝光图像和第二曝光图像;所述第一曝光图像的曝光度大于所述第二曝光图像的曝光度;
6、所述处理设备具体用于,根据所述第一曝光图像填补所述第二曝光图像中的无效像素,获得第一图像,和/或,根据所述第二曝光图像过滤所述第一曝光图像中的噪点像素,获得第二图像;
7、所述处理设备具体还用于,根据所述第一图像和/或所述第二图像,获取所述目标二维图像。
8、可选的,所述处理设备具体还用于:
9、根据所述第二曝光图像中所述无效像素的靶向像素位置,确定所述第一曝光图像中对应的靶向像素位置处的第一有效像素;
10、根据所述第一有效像素填补所述无效像素的靶向像素位置,得到所述第一图像。
11、可选的,所述处理设备具体还用于:
12、根据所述第一曝光图像中所述噪点像素的像素位置,确定所述第二曝光图像中对应的靶向像素位置处的第二有效像素;
13、过滤所述噪点像素,并根据所述第二有效像素填补所述第一曝光图像中对应的靶向像素位置,得到所述第二图像。
14、可选的,所述第一摄像设备包括相机本体和远心镜头,所述相机本体与所述远心镜头固定连接;所述第一摄像设备具体用于,通过所述远心镜头对所述待测焊印区进行至少两次曝光拍摄,获得至少两组曝光数据,以及通过所述相机本体根据所述至少两组曝光数据,生成所述至少两次曝光的二维图像。
15、可选的,所述系统还包括:光源设备,所述光源设备设置在所述第一摄像设备和所述待测焊印区之间;所述第一摄像设备位于所述待测焊印区的第一方向上;
16、所述光源设备用于,向所述待测焊印区发射第二方向上的光线;所述第二方向与所述第一方向的夹角小于预设角度阈值。
17、可选的,所述系统还包括:第二摄像设备,所述第二摄像设备与所述处理设备通信连接;
18、所述第二摄像设备用于,获取所述待测焊印区的三维图像;
19、所述处理设备还用于,根据所述目标二维图像,确定所述待测焊印区不存在第一异常,以及根据所述目标二维图像和所述三维图像,确定所述待测焊印区的检测结果。
20、可选的,所述待测焊印区包括边沿和顶角;
21、所述第二摄像设备具体用于,按照预设运动路径对所述边沿进行扫描,并按照预设倾斜角对所述顶角进行扫描,得到扫描结果,以及将所述扫描结果发送给所述处理设备;所述预设倾斜角为所述第二摄像设备的扫描面与所述待测焊印区所在平面的夹角;
22、所述处理设备还用于,根据所述扫描结果生成所述待测焊印区的三维图像。
23、可选的,所述第二摄像设备的数量为n个,n为正整数;
24、n个所述第二摄像设备中的至少1个具体用于,按照所述预设运动路径,对所述边沿进行扫描,得到至少1个第一扫描结果;
25、n个所述第二摄像设备中的至少1个具体用于,按照所述预设倾斜角,对所述顶角进行扫描,得到至少1个第二扫描结果;
26、所述处理设备具体还用于,对所述第一扫描结果和所述第二扫描结果进行拟合,将拟合结果确定为所述扫描结果。
27、可选的,所述处理设备具体用于:
28、在所述三维图像中存在扫描盲区的情况下,根据所述目标二维图像确定所述扫描盲区对应的二维数据;
29、根据所述二维数据补齐所述三维图像中所述扫描盲区的三维数据,得到补齐后的三维图像;
30、根据所述补齐后的三维图像和所述目标二维图像,确定所述待测焊印区的检测结果。
31、可选的,所述处理设备具体用于:
32、在根据所述三维图像,确定所述待测焊印区不存在第二异常的情况下,执行所述根据所述目标二维图像和所述三维图像,确定所述待测焊印区的检测结果的步骤。
33、第二方面,本技术实施例提供一种焊印检测方法,应用于如第一方面所述的焊印检测系统,所述焊印检测系统包括第一摄像设备和处理设备,所述第一摄像设备与所述处理设备通信连接;所述方法包括:
34、通过所述第一摄像设备获取所述待测焊印区的至少两次曝光的二维图像,并将所述至少两次曝光的二维图像发送给所述处理设备;所述至少两次曝光的二维图像包括不同曝光度下的二维图像;
35、通过所述处理设备基于所述不同曝光度下的二维图像进行融合以去除异常像素点,获得目标二维图像,以及根据所述目标二维图像,确定所述待测焊印区的检测结果。
36、第三方面,本技术实施例提供一种电子设备,包括处理器和存储器,所述存储器存储可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如第二方面所述的焊印检测方法的步骤。
37、第四方面,本技术实施例提供一种可读存储介质,其特征在于,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如第二方面所述的焊印检测方法的步骤。
38、在本技术实施例中,可以通过第一摄像设备获取待测焊印区的至少两次曝光的二维图像,可以获得不同曝光度下的二维图像,过第一摄像设备可以将至少两次曝光的二维图像发送给与第二摄像设备通信连接的处理设备,使得处理设备可以基于不同曝光度下的二维图像进行融合以去除异常像素点,从而避免噪点像素或无效像素对检测结果造成的影响,根据获得的目标二维图像确定待测焊印区的检测结果,可以提高待测焊印区的检测结果的准确度。
- 还没有人留言评论。精彩留言会获得点赞!