一种过约束空间四连杆机构组合的建模与分析方法
本技术涉及建模与运动分析,尤其涉及一种过约束空间四连杆机构组合的建模与分析方法。
背景技术:
1、bennett连杆机构指的是一种特殊的单自由度空间四连杆机构,又称过约束空间四连杆机构。它由四个杆和连接杆的四个旋转铰组成,旋转铰轴线之间既不平行也不交于一点,铰轴线都垂直于它所连接的两个杆。bennett连杆机构衍生形式,指的是任意bennett连杆机构分别从端点以对端点相等的原则延长一定长度c、d形成的空间四连杆机构。bennett连杆机构衍生形式在满足一定的几何条件时,将具有完全折叠与完全展开的性质。对于一个由n杆组成且具有相同横截面的环形闭合体来说,如果要求整个结构能完全折叠,横截面必须选择规则的n边形。因此,此四连杆机构的横截面应选为正方形。以bennet连杆机构衍生形式为基本单元,通过一定的连接方式可拓展成覆盖更大平面的网格组合,例如斜放式网格、正放式网格和柱面网格等等。bennett连杆机构衍生形式组合具有操作简单快捷、完全收拢状态占用空间小、可重复利用、便于运输和储存等优点。在实际工程中,例如在建筑工程、航天技术、应急救灾和医疗器械等领域,需要能够在储存或运输时折叠至尽量小的体积,在使用时再展开覆盖较大范围的可动结构,因此bennett连杆机构组合在上述领域中具有广阔的应用前景。但目前针对bennett连杆机构组合的建模往往是对整个单元体进行实体建模,涉及的角度较多、建模速度较慢,且由于仅针对单元体建模,未考虑到组成单元体的各个单元,在后续运动分析时无法针对单元体的各单元进行分析,导致后续的分析不准确。
技术实现思路
1、本技术实施例提供了一种过约束空间四连杆机构组合的建模与分析方法。
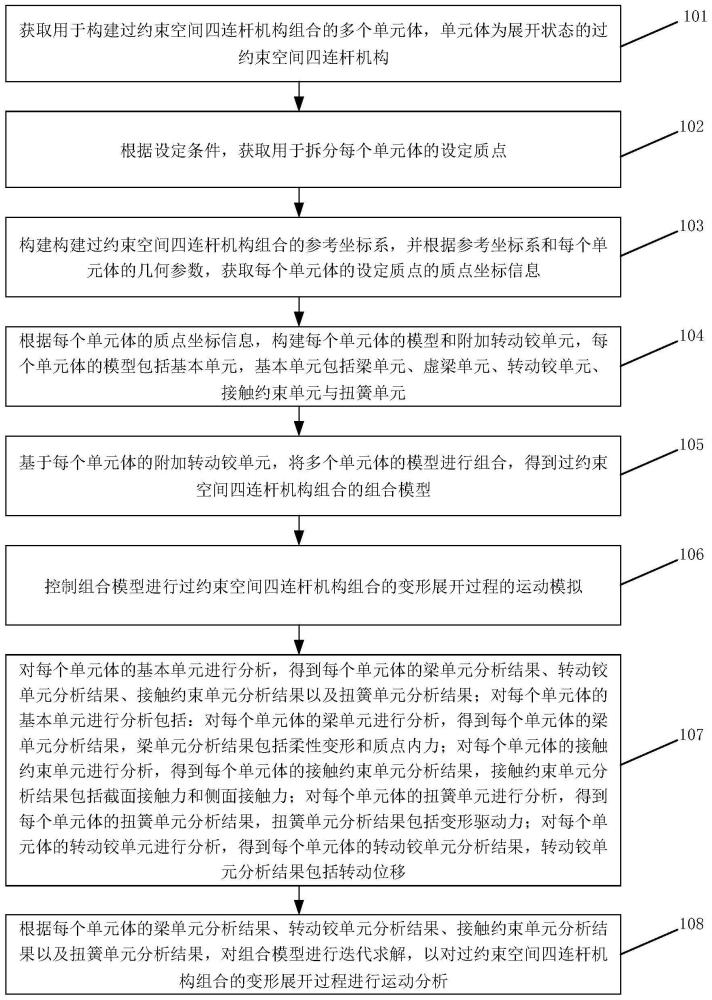
2、根据本技术的第一方面,提供了一种过约束空间四连杆机构组合的建模与分析方法,该方法包括:获取用于构建过约束空间四连杆机构组合的多个单元体,所述单元体为展开状态的过约束空间四连杆机构;根据设定条件,获取用于拆分每个单元体的设定质点;构建所述过约束空间四连杆机构组合的参考坐标系,并根据所述参考坐标系和所述每个单元体的几何参数,获取所述每个单元体的设定质点的质点坐标信息;根据所述每个单元体的质点坐标信息,构建所述每个单元体的模型和附加转动铰单元,所述每个单元体的模型包括基本单元,所述基本单元包括梁单元、虚梁单元、转动铰单元、接触约束单元与扭簧单元;基于所述每个单元体的附加转动铰单元,将所述多个单元体的模型进行组合,得到所述过约束空间四连杆机构组合的组合模型;控制所述组合模型进行所述过约束空间四连杆机构组合的变形展开过程的运动模拟;对所述每个单元体的基本单元进行分析,得到所述每个单元体的梁单元分析结果、转动铰单元分析结果、接触约束单元分析结果以及所述扭簧单元分析结果;所述对所述每个单元体的基本单元进行分析包括:对所述每个单元体的梁单元进行分析,得到所述每个单元体的所述梁单元分析结果,所述梁单元分析结果包括柔性变形和质点内力;对所述每个单元体的接触约束单元进行分析,得到所述每个单元体的所述接触约束单元分析结果,所述接触约束单元分析结果包括截面接触力和侧面接触力;对所述每个单元体的扭簧单元进行分析,得到所述每个单元体的所述扭簧单元分析结果,所述扭簧单元分析结果包括变形驱动力;对所述每个单元体的转动铰单元进行分析,得到所述每个单元体的所述转动铰单元分析结果,所述转动铰单元分析结果包括转动位移;根据所述每个单元体的梁单元分析结果、转动铰单元分析结果、接触约束单元分析结果以及所述扭簧单元分析结果,对所述组合模型进行迭代求解,以对所述过约束空间四连杆机构组合的变形展开过程进行运动分析。
3、根据本技术一实施方式,所述四个参考质点包括第一参考质点、第二参考质点、第三参考质点、第四参考质点;相应的,所述构建所述每个单元体的参考坐标系,包括:以所述每个单元体的中心为原点,以所述原点至所述第三参考质点的方向为x轴正向,以所述第一参考质点至所述第三参考质点的方向作为y轴的正向,构建所述参考坐标系。
4、根据本技术一实施方式,所述每个单元体的几何参数包括所述单元体的连杆长度、展开角、上扬角以及连杆倾斜角;所述展开角为第二参考质点和第三参考质点所形成的第一线段与所述x轴负方向的夹角;所述上扬角为所述原点和所述第三参考质点所形成的中间线段与所述y轴正向的夹角;所述连杆倾斜角为所述每个单元体的矩形截面边与设定平面的夹角。
5、根据本技术一实施方式,所述根据设定条件,获取用于拆分每个单元体的设定质点,包括:根据所述每个单元体的每个连杆的连杆轴线,获取所述每个单元体的四个参考质点;获取所述每个单元体的每个连杆的两个参考质点之间的设定数量的连杆质点;根据所述每个单元体的四个参考质点以及所述四个参考质点所在的端部截面,确定所述每个单元体的每个端部截面的端部质点;其中,所述设定质点包括所述每个单元体的参考质点、连杆质点和端部质点。
6、根据本技术一实施方式,根据所述每个单元体的质点坐标信息,构建所述每个单元体的模型基本单元和附加转动铰单元,包括:根据所述每个单元体的每个连杆上两个参考质点的坐标,构建所述每个单元体的每个连杆的子梁单元;所述每个单元体的梁单元包括所述每个单元体的所有子梁单元;根据所述每个单元体的每个连杆的两个参考质点的坐标和两个参考质点所在端部截面的端部质点的坐标,构建所述每个连杆的子虚梁单元;所述每个单元体的虚梁单元包括所述每个单元体的每个连杆的子虚梁单元;根据所述每个单元体的每个参考质点的坐标、每个参考质点所在端部截面的四个端部质点的坐标以及每个参考质点处的第一设定轴承、第一设定轴颈和第一设定转轴方向,构建所述每个参考质点处的子转动铰单元;所述每个单元体的转动铰单元包括每个参考质点处的子转动铰单元;根据所述每个单元体的每个参考质点的坐标、所述每个参考质点所在端部截面的四个端部质点的坐标以及所述每个参考质点所在连杆的端部截面法向量和侧面法向量,构建所述每个参考质点处的子接触约束单元;所述每个单元体的接触约束单元包括所述每个参考质点处的子接触约束单元;根据每个单元体的每个参考质点的坐标、所述每个参考质点所在端部截面的四个端部质点的坐标以及所述每个参考质点的第一设定转轴,构建所述每个参考质点处的子扭簧单元;所述每个单元体的扭簧单元包括所述每个参考质点处的子扭簧单元;根据每个单元体的每个参考质点的坐标、所述每个参考质点所在端部截面的四个端部质点的坐标以及每个参考质点的第二设定轴承、第二设定轴颈以及第二转轴方向,构建所述每个参考质点处的子附加转动铰单元;所述每个单元体的附加转动铰单元包括所述每个参考质点处的子附加转动铰单元。
7、根据本技术一实施方式,所述方法还包括:对所述组合模型进行运动分析,得到运动分析结果,所述运动分析结果包括每个单元体的梁单元分析结果、转动铰单元分析结果、接触约束单元分析结果以及所述扭簧单元分析结果;其中,对所述组合模型进行运动分析,得到运动分析结果,包括:对所述每个单元体的梁单元进行分析,得到所述每个单元体的所述梁单元分析结果,所述梁单元分析结果包括连杆柔性变形和质点内力;对所述每个单元体的接触约束单元进行分析,得到所述每个单元体的所述接触约束单元分析结果,所述接触约束单元分析结果包括端部截面接触力和侧面接触力;对所述每个单元体的扭簧单元进行分析,得到所述每个单元体的所述扭簧单元分析结果,所述扭簧单元分析结果包括机构变形驱动力;对所述每个单元体的转动铰单元进行分析,得到所述每个单元体的所述转动铰单元分析结果,所述转动铰单元分析结果包括转动位移。
8、根据本技术一实施方式,所述对所述每个单元体的所述梁单元进行分析,包括:对每个单元体的梁单元的每个子梁单元进行分析;其中,对每个单元体的梁单元的每个子梁单元进行分析,包括:构建所述每个子梁单元的第一局部运动坐标系;基于虚拟运动法和所述第一局部运动坐标系,确定所述每个子梁单元中的每个连杆从第一时刻到第二时刻的位移增量;基于所述每个连杆的位移增量,确定所述每个连杆对应的变形连杆;将所述每个连杆和对应的变形连杆进行变形比对,得到每个连杆在所述第一局部运动坐标系下的局部柔性变形,所述据柔性变形包括局部压拉变形和局部弯曲变形;根据所述每个连杆的柔性变形,确定所述每个连杆在所述第一局部运动坐标系下的局部质点内力,所述局部质点内力包括所述每个连杆对应的两个质点的两个局部质点内力;根据所述第一局部运动坐标系和所述参考坐标系,将所述局部柔性变形和所述局部质点内力转换为所述每个连杆在所述参考坐标系下的柔性变形和质点内力。
9、根据本技术一实施方式,所述对所述每个单元体的接触约束单元进行分析,包括:对每个单元体的接触约束单元的每个子接触约束单元进行分析;其中,对每个单元体的接触约束单元的每个子接触约束单元进行分析,包括:获取每个参考质点处的侧面法向量和截面法向量;根据所述每个参考质点处的侧面法向量和截面法向量,确定所述每个参考质点处的二面角;基于罚函数和所述每个参考质点的二面角,确定所述每个参考质点处的端截面接触力和端侧面接触力。
10、根据本技术一实施方式,对所述每个单元体的扭簧单元进行分析,包括:对每个单元体的扭簧单元的每个子扭簧单元进行分析;其中,对每个单元体的扭簧单元的每个子扭簧单元进行分析,包括:获取每个参考质点处的平面法向量;基于所述每个参考质点的平面法向量和方向角函数,确定所述每个参考质点处的扭簧转角;根据所述每个参考质点处的扭簧转角,确定所述每个参考质点处的机构变形驱动力。
11、根据本技术一实施方式,对所述每个单元体的转动铰单元进行分析,包括:对每个单元体的转动铰单元的每个子转动铰单元进行分析;其中,对每个单元体的转动铰单元的每个子转动铰单元进行分析,包括:获取所述每个单元体的每个参考质点处的第二设定轴承和第二设定轴颈对应的第一中心质点和第二中心质点,所述第一中心质点和所述第二中心质点的平动自由度相互耦合;以所述每个参考质点处的第一中心质点为原点,以第二设定转轴作为z轴,构建第二局部坐标系;基于所述第二局部坐标系,构建第一中心质点和第二中心质点的运动方程和自由度耦合方程;根据所述运动方程和所述自由度耦合方程,确定所述每个连杆的每个参考质点在第二局部坐标系下的局部转动位移;根据所述参考坐标系和所述第二局部坐标系,确定所述局部转动位移对应在所述参考坐标系下的转动位移。
12、在本技术一实施方式中,根据所述每个单元体的梁单元分析结果、转动铰单元分析结果、接触约束单元分析结果以及所述扭簧单元分析结果,对所述组合模型进行迭代求解,以对所述过约束空间四连杆机构组合的变形展开过程进行运动分析,包括:根据所述每个单元体的梁单元分析结果、转动铰单元分析结果、接触约束单元分析结果以及所述扭簧单元分析结果,确定所述每个单元体的设定质点的力信息;根据所述每个单元体的设定质点的力信息,确定所述每个单元体的设定质点在当前时刻的质点位移;根据每个单元体的设定质点在上一时刻的前质点位移和当前时刻的质点位移,获取所述每个单元体的设定质点在下一时刻的后质点位移。
13、本技术实施例的方法,本技术提供了一种过约束空间四连杆机构组合的模型构建与分析方法及装置,通过获取用于构建过约束空间四连杆机构组合的多个单元体,并将每个单元体拆分为设定质四个参考质点,根据设定质点的质点间组合构建组成每个单元体的模型的基本单元,并构建每个单元体的能够根据每个单元体的参考质点构建每个单元体的模型基本单元和附加转动铰单元,通过附加转动铰单元组合每个单元体的模型构建组合模型,提升了建模速度,之后再通过对每个单元体模型中的梁单元、转动铰单元、接触约束单元与扭簧单元进行分析,得到对应的柔性变形和质点内力、截面接触力和侧面接触力、变形驱动力以及转动位移,以对过约束空间四连杆机构组合的变形展开过程进行运动分析,避免了仅针对单元体整体进行分析带来的分析不准确的问题,提升了分析的准确率。
14、需要理解的是,本技术的教导并不需要实现上面所述的全部有益效果,而是特定的技术方案可以实现特定的技术效果,并且本技术的其他实施方式还能够实现上面未提到的有益效果。
- 还没有人留言评论。精彩留言会获得点赞!