工业相机的视觉定位控制系统及其方法与流程
本公开涉及工业相机领域,且更为具体地,涉及一种工业相机的视觉定位控制系统及其方法。
背景技术:
1、在传统的印染刺绣行业,在十字绣的喷涂工艺上基本都采用的是靠机械定位来完成喷涂,但是在传送的过程中十字绣的布会产生扭曲变形,导致了十字绣上的图案不准确或者会遗漏缺失。
2、十字绣通过在白布上喷涂图案,然后用彩色线按照图案上的点进行刺绣,从而制作出美观的绣品。然而,传统的十字绣喷涂工艺存在着一些问题,主要是由于机械定位的不准确和传送过程中绣布的扭曲变形,导致了喷涂图案的失真和缺失,影响了绣品的质量和效率。因此,期待一种优化的定位控制方案。
技术实现思路
1、有鉴于此,本公开提出了一种工业相机的视觉定位控制系统及其方法,其利用工业相机与计算机图像识别技术,可以根据绣布实时监控图像,自动生成具有坐标标注的绣布定位图像,以使得喷涂打印系统能够利用具有坐标标注的绣布定位图像来实现准确的喷涂打印。
2、根据本公开的一方面,提供了一种工业相机的视觉定位控制方法,其包括:
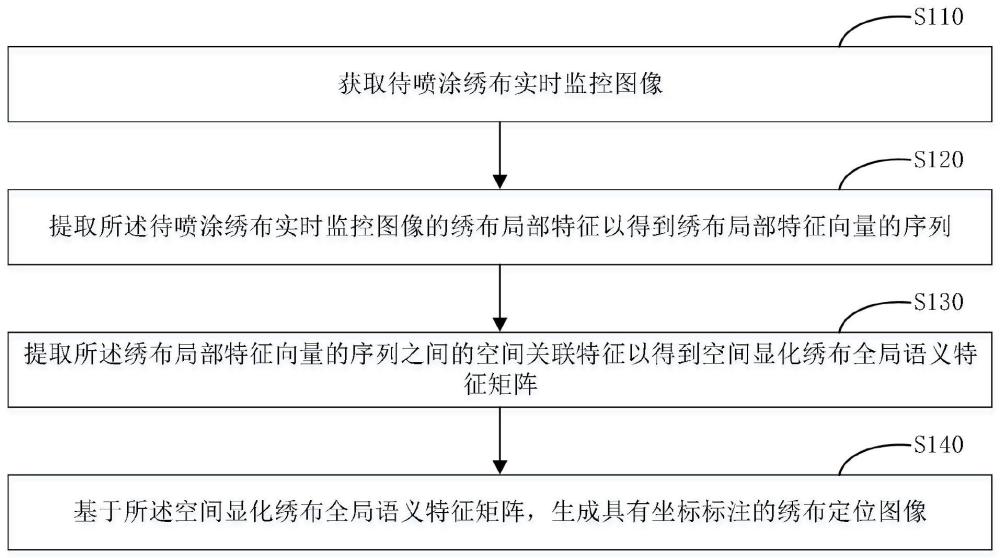
3、获取待喷涂绣布实时监控图像;
4、提取所述待喷涂绣布实时监控图像的绣布局部特征以得到绣布局部特征向量的序列;
5、提取所述绣布局部特征向量的序列之间的空间关联特征以得到空间显化绣布全局语义特征矩阵;以及
6、基于所述空间显化绣布全局语义特征矩阵,生成具有坐标标注的绣布定位图像。
7、根据本公开的另一方面,提供了一种工业相机的视觉定位控制系统,其包括:
8、监控图像获取模块,用于获取待喷涂绣布实时监控图像;
9、绣布局部特征提取模块,用于提取所述待喷涂绣布实时监控图像的绣布局部特征以得到绣布局部特征向量的序列;
10、空间关联特征提取模块,用于提取所述绣布局部特征向量的序列之间的空间关联特征以得到空间显化绣布全局语义特征矩阵;以及
11、绣布定位图像生成模块,用于基于所述空间显化绣布全局语义特征矩阵,生成具有坐标标注的绣布定位图像。
12、根据本公开的实施例,其首先获取待喷涂绣布实时监控图像,接着,提取所述待喷涂绣布实时监控图像的绣布局部特征以得到绣布局部特征向量的序列,然后,提取所述绣布局部特征向量的序列之间的空间关联特征以得到空间显化绣布全局语义特征矩阵,最后,基于所述空间显化绣布全局语义特征矩阵,生成具有坐标标注的绣布定位图像。这样,可以实现准确的喷涂打印。
13、根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
技术特征:
1.一种工业相机的视觉定位控制方法,其特征在于,包括:
2.根据权利要求1所述的工业相机的视觉定位控制方法,其特征在于,提取所述待喷涂绣布实时监控图像的绣布局部特征以得到绣布局部特征向量的序列,包括:
3.根据权利要求2所述的工业相机的视觉定位控制方法,其特征在于,所述卷积神经网络模型包括输入层、第一卷积层、第一激活函数层、第一池化层、第二卷积层、第二激活函数层、第二池化层、全连接层和输出层。
4.根据权利要求3所述的工业相机的视觉定位控制方法,其特征在于,提取所述绣布局部特征向量的序列之间的空间关联特征以得到空间显化绣布全局语义特征矩阵,包括:
5.根据权利要求4所述的工业相机的视觉定位控制方法,其特征在于,将所述绣布局部特征向量的序列排列为绣布全局语义特征矩阵后通过空间注意力模块以得到空间显化绣布全局语义特征矩阵,包括:
6.根据权利要求5所述的工业相机的视觉定位控制方法,其特征在于,基于所述空间显化绣布全局语义特征矩阵,生成具有坐标标注的绣布定位图像,包括:
7.根据权利要求6所述的工业相机的视觉定位控制方法,其特征在于,还包括训练步骤:对所述基于卷积神经网络模型的绣布局部特征提取器、所述空间注意力模块和所述基于解码器的定位标识器进行训练;
8.一种工业相机的视觉定位控制系统,其特征在于,包括:
9.根据权利要求8所述的工业相机的视觉定位控制系统,其特征在于,所述绣布局部特征提取模块,包括:
10.根据权利要求9所述的工业相机的视觉定位控制系统,其特征在于,所述卷积神经网络模型包括输入层、第一卷积层、第一激活函数层、第一池化层、第二卷积层、第二激活函数层、第二池化层、全连接层和输出层。
技术总结
公开了一种工业相机的视觉定位控制系统及其方法。其首先获取待喷涂绣布实时监控图像,接着,提取所述待喷涂绣布实时监控图像的绣布局部特征以得到绣布局部特征向量的序列,然后,提取所述绣布局部特征向量的序列之间的空间关联特征以得到空间显化绣布全局语义特征矩阵,最后,基于所述空间显化绣布全局语义特征矩阵,生成具有坐标标注的绣布定位图像。这样,可以实现准确的喷涂打印。
技术研发人员:武浩敏,张留杰
受保护的技术使用者:深圳市富瑞姆机器视觉技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!