基于机器视觉的矿物铸件检测方法与流程
本发明涉及图像处理,具体涉及基于机器视觉的矿物铸件检测方法。
背景技术:
1、在矿业行业,基于机器视觉的矿物铸件检测技术正逐渐成为一项重要的技术应用,传统的铸件检测通常依赖于人工目测和手动检查,效率低且准确性有限,而机器视觉技术通过图像处理和分析算法,能够实现对铸件的自动化检测和缺陷分析,为生产过程中的质量控制提供了重要支持。
2、尽管基于机器视觉的矿物铸件检测技术取得了很大进展,但仍面临一些挑战,如复杂环境下的光照变化、铸件本身的多样性等。但随着技术的进步和算法的不断优化,这一技术在矿业行业中的应用前景广阔,随着自动化和智能化水平的不断提高,基于机器视觉的矿物铸件检测将在质量控制和生产效率提升方面发挥更重要的作用,目前,工业ct无损检测已经成为工业领域中非常重要的技术之一。
3、现有技术通过聚类方法分割图像时需要人工设定k值,而k值的选取要求一般较高,k值过小,缺陷部分会分割不完全,k值过大,分割的缺陷部分会由于过度分割产生噪声。
技术实现思路
1、为解决上述问题,本发明提供基于机器视觉的矿物铸件检测方法。
2、本发明的基于机器视觉的矿物铸件检测方法采用如下技术方案:
3、本发明一个实施例提供了基于机器视觉的矿物铸件检测方法,该方法包括以下步骤:
4、获取铸件灰度图像;
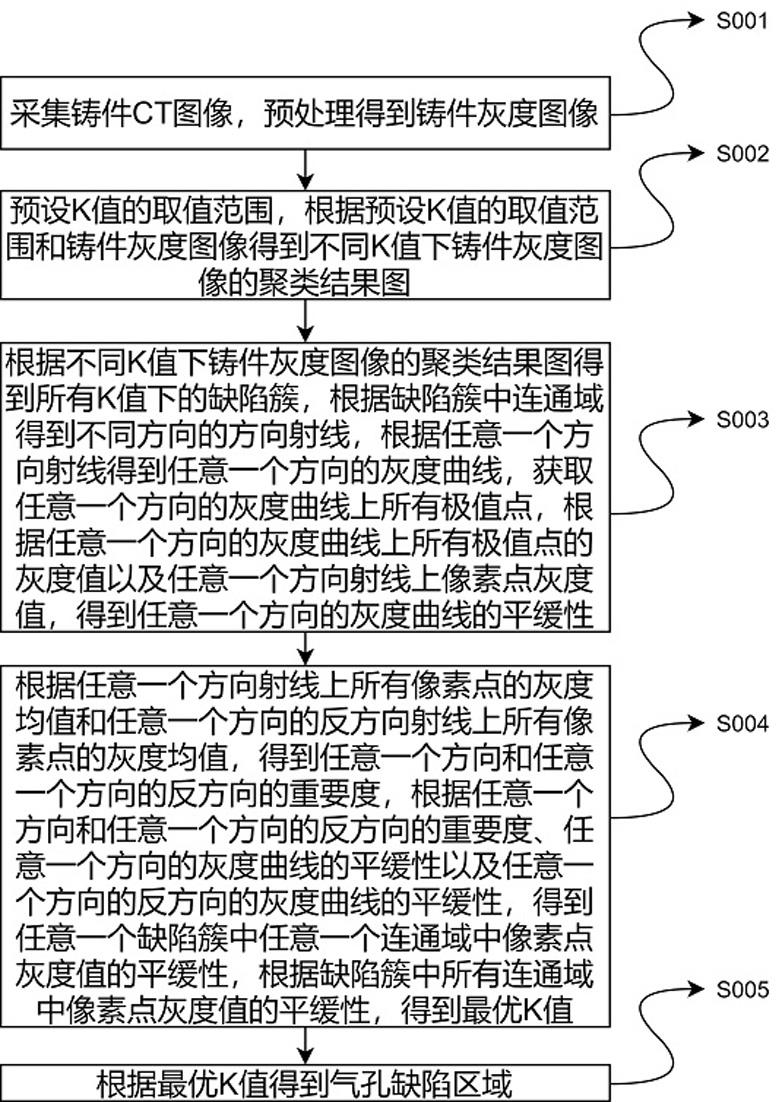
5、预设k值的取值范围,根据预设k值的取值范围和铸件灰度图像得到不同k值下铸件灰度图像的聚类结果图;
6、根据不同k值下铸件灰度图像的聚类结果图得到所有k值下的缺陷簇,根据缺陷簇中连通域得到不同方向的方向射线,根据任意一个方向射线得到任意一个方向的灰度曲线,获取任意一个方向的灰度曲线上所有极值点,根据任意一个方向的灰度曲线上所有极值点的灰度值以及任意一个方向射线上像素点灰度值,得到任意一个方向的灰度曲线的平缓性;
7、根据任意一个方向射线上所有像素点的灰度均值和任意一个方向的反方向射线上所有像素点的灰度均值,得到任意一个方向和任意一个方向的反方向的重要度,根据任意一个方向和任意一个方向的反方向的重要度、任意一个方向的灰度曲线的平缓性以及任意一个方向的反方向的灰度曲线的平缓性,得到任意一个缺陷簇中任意一个连通域中像素点灰度值的平缓性,根据缺陷簇中所有连通域中像素点灰度值的平缓性,得到最优k值;
8、根据最优k值得到缺陷区域。
9、进一步地,所述根据预设k值的取值范围和铸件灰度图像得到不同k值下铸件灰度图像的聚类结果图,包括的具体步骤如下:
10、在铸件灰度图像中随机选取k个像素点作为初始聚类中心,其中k值的取值范围为的整数,为预设k值的最大值,利用不同的k值对铸件灰度图像进行k-means聚类,得到不同k值下铸件灰度图像的聚类结果图。
11、进一步地,所述根据不同k值下铸件灰度图像的聚类结果图得到所有k值下的缺陷簇,包括的具体步骤如下:
12、获取不同k值下铸件灰度图像的聚类结果图中包含的若干类簇,将任意一个k值下铸件灰度图像的聚类结果图中包含的任意一个类簇,记为当前簇,根据当前簇中所有像素点的灰度值得到当前簇的灰度均值,获取当前簇所在k值下所有类簇的灰度均值,将当前簇所在k值下所有类簇的灰度均值最小的类簇记为当前簇所在k值下的缺陷簇,获取所有k值下的缺陷簇。
13、进一步地,所述根据缺陷簇中连通域得到不同方向的方向射线,包括的具体步骤如下:
14、对于任意一个k值下的缺陷簇,获取缺陷簇在铸件灰度图像中的所有连通域,对于缺陷簇在铸件灰度图像中的任意一个连通域,获取连通域的中心像素点,以连通域的中心像素点为起点,分别沿方向作射线,得到不同方向的方向射线。
15、进一步地,所述根据任意一个方向射线得到任意一个方向的灰度曲线,包括的具体步骤如下:
16、从方向开始按照顺时针的顺序,依次将所有方向标记为第一个方向、第二个方向、…第八个方向,获取第r个方向射线上从起点到连通域边缘点的所有像素点以及所有像素点的灰度值,将所有像素点的灰度值进行平滑处理得到第r个方向的灰度曲线。
17、进一步地,所述根据任意一个方向的灰度曲线上所有极值点的灰度值以及任意一个方向射线上像素点灰度值,得到任意一个方向的灰度曲线的平缓性,包括的具体步骤如下:
18、
19、式中,为第r个方向的灰度曲线上所有极值点的个数,为第r个方向的灰度曲线上第z个极值点的灰度值,为第r个方向的灰度曲线上第z+1个极值点的灰度值,为取绝对值,为第r个方向射线上连通域的边缘像素点灰度值,的获取方法如下:将第r个方向射线上连通域的边缘像素点作为第一起始点,从第一起始点开始按照第r个方向往外延伸像素点,将延伸第e个像素点的灰度值记为,为预设数值,为第r个方向的灰度曲线的平缓性。
20、进一步地,所述根据任意一个方向射线上所有像素点的灰度均值和任意一个方向的反方向射线上所有像素点的灰度均值,得到任意一个方向和任意一个方向的反方向的重要度,包括的具体步骤如下:
21、
22、式中,为第r个方向的方向射线上所有像素点的灰度值均值,记为第r个方向的方向射线上所有像素点的灰度均值,为第r+4个方向的方向射线上所有像素点的灰度值均值,记为第r个方向的反方向射线上所有像素点的灰度均值,为第r个方向和第r+4个方向的重要度,记为第r个方向和第r个方向的反方向的重要度。
23、进一步地,所述根据任意一个方向和任意一个方向的反方向的重要度、任意一个方向的灰度曲线的平缓性以及任意一个方向的反方向的灰度曲线的平缓性,得到任意一个缺陷簇中任意一个连通域中像素点灰度值的平缓性,包括的具体步骤如下:
24、
25、对于任意一个缺陷簇中任意一个连通域,式中,为第r个方向和第r+4个方向的重要度,为第r个方向的灰度曲线的平缓性,为第r+4个方向的灰度曲线的平缓性,记为第r个方向的反方向的灰度曲线的平缓性,为任意一个缺陷簇中任意一个连通域中像素点灰度值的平缓性。
26、进一步地,所述根据缺陷簇中所有连通域中像素点灰度值的平缓性,得到最优k值,包括的具体步骤如下:
27、
28、式中,为第k个缺陷簇中第j个连通域中像素点灰度值的平缓性,为第k个缺陷簇中连通域的总个数,为第k个缺陷簇的分割程度;
29、获取所有缺陷簇的分割程度,将所有缺陷簇的分割程度最小值对应的k值作为最优k值。
30、进一步地,所述根据最优k值得到缺陷区域,包括的具体步骤如下:
31、利用最优k值对铸件灰度图像进行k-means聚类,得到若干聚类结果,将灰度均值最大的聚类结果所构成的区域作为气孔缺陷区域。
32、本发明的技术方案的有益效果是:本发明通过对矿物铸件图像进行不同k值的聚类,根据缺陷的灰度值特性获取缺陷簇,根据缺陷簇中连通域得到任意一个方向的灰度曲线的平缓性,减少了连通域周围存在油渍影响,得到任意一个方向和任意一个方向的反方向的重要度,根据任意一个方向和任意一个方向的反方向的重要度、任意一个方向的灰度曲线的平缓性以及任意一个方向的反方向的灰度曲线的平缓性,得到最优的k值,根据最优的k值获得气孔缺陷区域,实现了对矿物铸件的缺陷检测。
- 还没有人留言评论。精彩留言会获得点赞!