任务处理方法与流程
本说明书实施例涉及计算机,特别涉及任务处理方法。
背景技术:
1、随着激光雷达、4d毫米波雷达等三维感知设备的技术发展,越来越多的车辆也通过配备这些三维感知设备以实现车辆自动驾驶。对于三维感知设备拍摄的、在自动驾驶场景下的三维点云数据量也越发庞大。然而,由于对三维点云数据进行人工标注的成本较高,导致有标注的三维点云数据数量较少,而大量的无标注的三维点云数据难以用于感知算法的训练,造成大量的数据浪费,进一步影响自动驾驶系统对周围环境感知的稳定性和泛用性。因此,亟需一种有效的技术方案解决上述问题。
技术实现思路
1、有鉴于此,本说明书实施例提供了一种任务处理方法。本说明书一个或者多个实施例同时涉及一种任务处理装置,一种任务处理模型的训练方法,一种任务处理模型的训练装置,一种目标车辆控制方法,一种目标车辆控制装置,一种计算设备,一种计算机可读存储介质以及一种计算机程序,以解决现有技术中存在的技术缺陷。
2、根据本说明书实施例的第一方面,提供了一种任务处理方法,包括:
3、对拍摄设备拍摄的待检测图像进行转换处理,获得所述待检测图像对应的三维点云数据图像,其中,所述三维点云数据图像包括多个三维点云数据单元,每个三维点云数据单元包括所述三维点云数据单元的特征、遮挡掩蔽图像、无穷远掩蔽图像和深度图像;
4、将所述三维点云数据图像输入任务处理模型,获得所述任务处理模型输出的任务处理结果,其中,所述任务处理模型根据随机遮挡的三维点云数据图像样本、以及所述随机遮挡的三维点云数据图像样本对应的掩蔽图像样本和深度图像样本预训练得到,所述掩蔽图像样本和所述深度图像样本根据所述随机遮挡的三维点云数据图像样本获得。
5、根据本说明书实施例的第二方面,提供了一种任务处理装置,包括:
6、转换模块,被配置为对拍摄设备拍摄的待检测图像进行转换处理,获得所述待检测图像对应的三维点云数据图像,其中,所述三维点云数据图像包括多个三维点云数据单元,每个三维点云数据单元包括所述三维点云数据单元的特征、遮挡掩蔽图像、无穷远掩蔽图像和深度图像;
7、输入模块,被配置为将所述三维点云数据图像输入任务处理模型,获得所述任务处理模型输出的任务处理结果,其中,所述任务处理模型根据随机遮挡的三维点云数据图像样本、以及所述随机遮挡的三维点云数据图像样本对应的掩蔽图像样本和深度图像样本预训练得到,所述掩蔽图像样本和所述深度图像样本根据所述随机遮挡的三维点云数据图像样本获得。
8、根据本说明书实施例的第三方面,提供了一种任务处理模型的训练方法,应用于服务端,包括:
9、对三维点云数据图像样本进行随机遮挡处理,获得随机遮挡的三维点云数据图像样本;
10、根据所述随机遮挡的三维点云数据图像样本,确定所述随机遮挡的三维点云数据图像样本对应的掩蔽图像样本和深度图像样本;
11、将所述随机遮挡的三维点云数据图像样本、遮挡的三维点云数据单元样本、无特征的三维点云数据单元样本,输入特征提取模型,获得初始掩蔽图像和初始深度图像,其中,所述遮挡的三维点云数据单元样本、以及所述无特征的三维点云数据单元样本从所述随机遮挡的三维点云数据图像样本中确定;
12、根据所述初始掩蔽图像、所述初始深度图像、所述掩蔽图像样本和所述深度图像样本,确定预测掩蔽图像和预测深度图像,并根据所述预测掩蔽图像和所述预测深度图像训练特征提取模型,其中,所述特征提取模型为所述任务处理模型中的特征提取网络层。
13、根据本说明书实施例的第四方面,提供了一种任务处理模型的训练装置,应用于服务端,包括:
14、遮挡模块,被配置为对三维点云数据图像样本进行随机遮挡处理,获得随机遮挡的三维点云数据图像样本;
15、确定模块,被配置为根据所述随机遮挡的三维点云数据图像样本,确定所述随机遮挡的三维点云数据图像样本对应的掩蔽图像样本和深度图像样本;
16、输入模块,被配置为将所述随机遮挡的三维点云数据图像样本、遮挡的三维点云数据单元样本、无特征的三维点云数据单元样本,输入特征提取模型,获得初始掩蔽图像和初始深度图像,其中,所述遮挡的三维点云数据单元样本、以及所述无特征的三维点云数据单元样本从所述随机遮挡的三维点云数据图像样本中确定;
17、训练模块,被配置为根据所述初始掩蔽图像、所述初始深度图像、所述掩蔽图像样本和所述深度图像样本,确定预测掩蔽图像和预测深度图像,并根据所述预测掩蔽图像和所述预测深度图像训练特征提取模型,其中,所述特征提取模型为所述任务处理模型中的特征提取网络层。
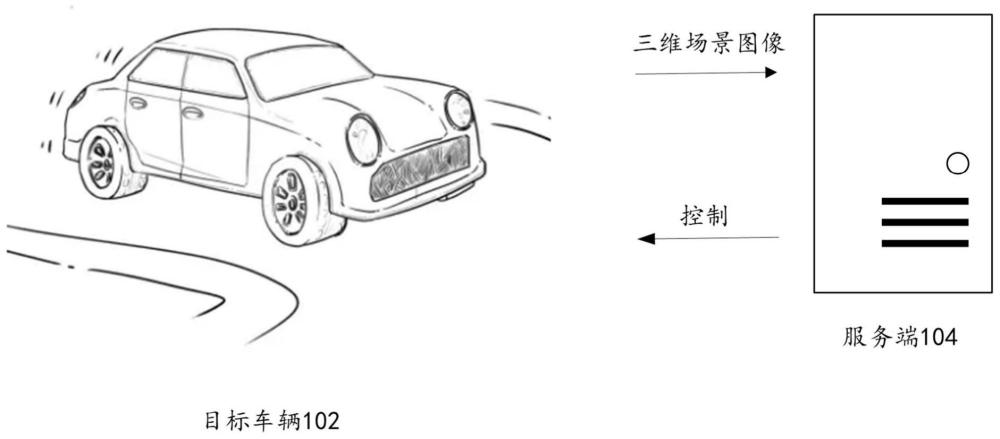
18、根据本说明书实施例的第五方面,提供了一种目标车辆控制方法,应用于服务端,包括:
19、接收目标车辆发送的图像检测请求,其中,所述图像检测请求携带有待检测图像;
20、对所述待检测图像进行转换处理,获得所述待检测图像对应的三维点云数据图像,其中,所述三维点云数据图像包括多个三维点云数据单元,每个三维点云数据单元包括所述三维点云数据单元的特征、遮挡掩蔽图像、无穷远掩蔽图像和深度图像;
21、将所述三维点云数据图像输入任务处理模型,获得所述任务处理模型输出的任务处理结果,其中,所述任务处理模型根据随机遮挡的三维点云数据图像样本、以及所述随机遮挡的三维点云数据图像样本对应的掩蔽图像样本和深度图像样本预训练得到,所述掩蔽图像样本和所述深度图像样本根据所述随机遮挡的三维点云数据图像样本获得;
22、根据所述任务处理结果,确定所述目标车辆的行驶轨迹,并根据所述行驶轨迹控制所述目标车辆移动。
23、根据本说明书实施例的第六方面,提供了一种目标车辆控制装置,应用于服务端,包括:
24、接收模块,被配置为接收目标车辆发送的图像检测请求,其中,所述图像检测请求携带有待检测图像;
25、转换模块,被配置为对所述待检测图像进行转换处理,获得所述待检测图像对应的三维点云数据图像,其中,所述三维点云数据图像包括多个三维点云数据单元,每个三维点云数据单元包括所述三维点云数据单元的特征、遮挡掩蔽图像、无穷远掩蔽图像和深度图像;
26、输入模块,被配置为将所述三维点云数据图像输入任务处理模型,获得所述任务处理模型输出的任务处理结果,其中,所述任务处理模型根据随机遮挡的三维点云数据图像样本、以及所述随机遮挡的三维点云数据图像样本对应的掩蔽图像样本和深度图像样本预训练得到,所述掩蔽图像样本和所述深度图像样本根据所述随机遮挡的三维点云数据图像样本获得;
27、确定模块,被配置为根据所述任务处理结果,确定所述目标车辆的行驶轨迹,并根据所述行驶轨迹控制所述目标车辆移动。
28、根据本说明书实施例的第七方面,提供了一种计算设备,包括:
29、存储器和处理器;
30、所述存储器用于存储计算机可执行指令,所述处理器用于执行所述计算机可执行指令,该计算机可执行指令被处理器执行时实现上述方法的步骤。
31、根据本说明书实施例的第八方面,提供了一种计算机可读存储介质,其存储有计算机可执行指令,该指令被处理器执行时实现上述方法的步骤。
32、根据本说明书实施例的第九方面,提供了一种计算机程序,其中,当所述计算机程序在计算机中执行时,令计算机执行上述方法的步骤。
33、本说明书一个实施例提供了一种任务处理方法,对拍摄设备拍摄的待检测图像进行转换处理,获得所述待检测图像对应的三维点云数据图像,其中,所述三维点云数据图像包括多个三维点云数据单元,每个三维点云数据单元包括所述三维点云数据单元的特征、遮挡掩蔽图像、无穷远掩蔽图像和深度图像;将所述三维点云数据图像输入任务处理模型,获得所述任务处理模型输出的任务处理结果,其中,所述任务处理模型根据随机遮挡的三维点云数据图像样本、以及所述随机遮挡的三维点云数据图像样本对应的掩蔽图像样本和深度图像样本预训练得到,所述掩蔽图像样本和所述深度图像样本根据所述随机遮挡的三维点云数据图像样本获得。
34、上述方法通过在对任务处理模型进行训练时,根据随机遮挡的三维点云数据图像样本计算得到掩蔽图像样本和深度图像样本,避免了人工对三维点云数据图像样本进行标注,并根据随机遮挡的三维点云数据图像样本、掩蔽图像样本和深度图像样本对任务处理模型进行预训练,使任务处理模型能够学习到三维环境感知能力。进一步在任务处理模型应用过程中,能够对三维点云数据图像进行处理,使得到的任务处理结果更加准确,在应用于自动驾驶场景的情况下能够保证该任务处理模型对车辆周围环境感知的稳定性和泛用性。
- 还没有人留言评论。精彩留言会获得点赞!