基于深度时序图像学习的溜槽角度异常诊断方法及系统
本发明涉及高炉冶炼工艺和图像处理,尤其涉及一种基于深度时序图像学习的溜槽角度异常诊断方法及系统。
背景技术:
1、高炉布料是高炉冶炼工艺的核心组成部分,布料溜槽是高炉布料系统的关键部件。为使得高炉内的原料能与气体充分接触,需要炉顶布料系统精准调整布料角度。高炉炼铁生产中,由于设备磨损和数据信号漂移等原因,溜槽的实际角度与显示角度有可能出现偏差。其中,溜槽α角(如图1所示)的控制是装料制度的重要内容。此外,由于高炉溜槽处于高温、高压、高粉尘的密闭运行环境,加之炉料下落对溜槽的频繁冲击,将导致高炉溜槽实际执行角度与理论设定角度不一致。为避免溜槽角度“跑偏”,需要对溜槽角度进行校核。
2、目前,高炉溜槽角度的校核技术主要分为:高炉休风时炉内测量、炉外机械装置接触测量、炉外激光非接触式测量三种。
3、炉内测量方法是在检修门与溜槽之间用钢板搭建一个斜桥,测量人员通过斜桥进入炉内,用量角器测定溜槽角度,是测量溜槽角度最直接、传统的方法。该类方法需打开炉顶检修大方孔及搭建测量操作平台,测量干扰性大,也存在作业安全风险。
4、炉外机械装置接触测量技术利用高炉人孔将测量装置紧贴溜槽背面从而测量溜槽角度,避免了打开炉顶检修大方孔及搭测量操作平台的不足,测定过程安全简单。但是人孔直径有限,上述装置多难以伸入,操作较复杂。此外,为保证测量精度,需保证测量装置与溜槽背面紧靠。但实际应用中往往难以观察是否满足上述要求,测量准确性和可信度不高。
5、炉外激光非接触式测量技术利用激光测距仪,通过高炉人孔测量激光与竖向支柱的夹角从而得到溜槽角度,或通过激光对高炉溜槽上的点进行采样,间接地计算出溜槽角度。但该技术操作复杂且成本较高。此外,上述方法也需要打开检查门或观察孔,只能在高炉检修期间进行角度校核。
6、为避免高炉溜槽角度异常,相关研究提出了基于机械装置的接触式测量、基于激光的非接触式测量等手段的溜槽角度校核技术。但是,上述方法均需要在高炉休风检修时进行溜槽“跑偏”诊断。由于高炉一般休风2-3次/年,当发现溜槽“跑偏”时,已经对高炉运行造成恶劣影响,因此当前研究方法在及时性、便捷性等方面存在不足,亟待设计一种可以实时判断溜槽角度是否异常的方法。
技术实现思路
1、为此,本发明实施例提供了一种基于深度时序图像学习的溜槽角度异常诊断方法及系统,用于解决现有技术中现有的溜槽角度校核方法均需要在高炉休风检修时进行高炉溜槽角度校核,由于高炉一般休风2-3次/年,当发现溜槽角度异常时,已经对高炉运行造成恶劣影响,因此当前研究方法在及时性、便捷性等方面存在不足的问题。
2、为了解决上述问题,本发明实施例提供一种基于深度时序图像学习的溜槽角度异常诊断方法,所述方法包括:
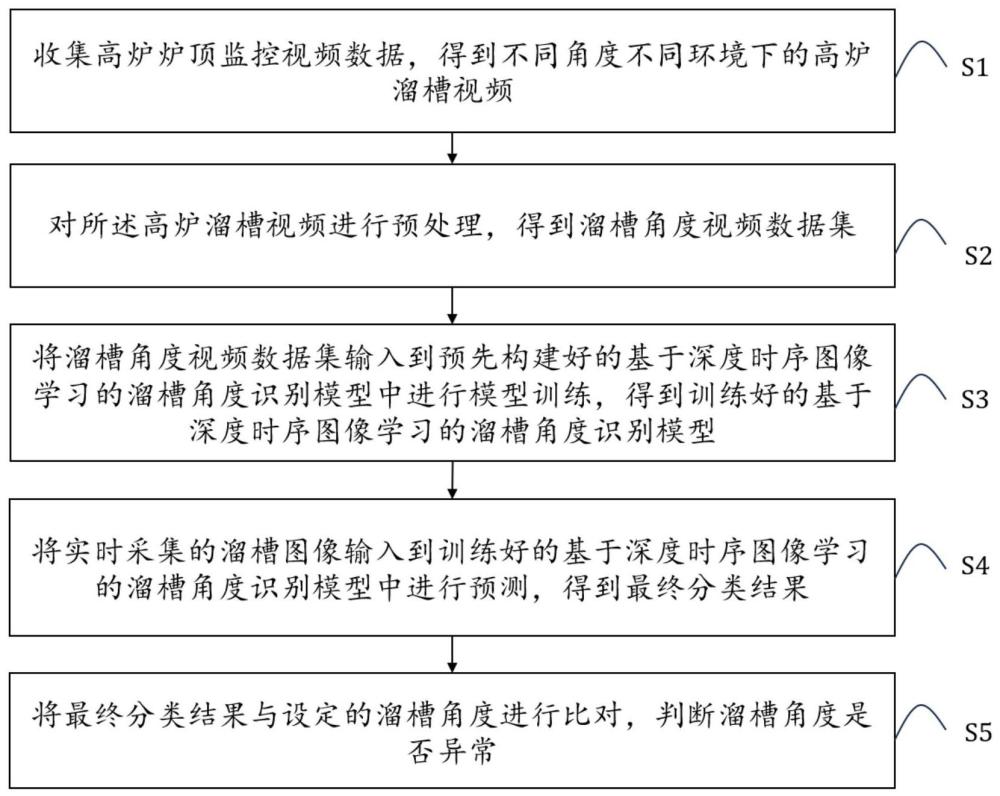
3、步骤s1:收集高炉炉顶监控视频数据,得到不同角度不同环境下的高炉溜槽视频;
4、步骤s2:对所述高炉溜槽视频进行预处理,得到溜槽角度视频数据集;
5、步骤s3:将溜槽角度视频数据集输入到预先构建好的基于深度时序图像学习的溜槽角度识别模型中进行模型训练,得到训练好的基于深度时序图像学习的溜槽角度识别模型;
6、步骤s4:将实时采集的溜槽图像输入到训练好的基于深度时序图像学习的溜槽角度识别模型中进行预测,得到最终分类结果;
7、步骤s5:将最终分类结果与设定的溜槽角度进行比对,判断溜槽角度是否异常。
8、优选地,在步骤s2中,对所述高炉溜槽视频进行预处理的方法包括:
9、对所述高炉溜槽视频进行时序窗口的采样,在高炉溜槽视频中,溜槽每个角度旋转一圈的帧数为n,采样的图像窗口帧数为m,通过隔n/m取一帧图像加入到窗口中,一个视频取n/m个窗口,能够最大程度保留视频特征。
10、优选地,在步骤s3中,将溜槽角度视频数据集输入到预先构建好的基于深度时序图像学习的溜槽角度识别模型中进行模型训练,得到训练好的基于深度时序图像学习的溜槽角度识别模型的方法具体包括:
11、s31:将溜槽角度视频数据集按比例进行划分,得到训练样本集和测试样本集;
12、s32:将训练样本集输入到预先构建好的基于深度时序图像学习的溜槽角度识别模型中进行模型训练;
13、s33:利用交叉熵函数计算预测值和真实值的损失,保存损失函数收敛时的模型权重,得到训练好的基于深度时序图像学习的溜槽角度识别模型。
14、优选地,在步骤s32中,将训练样本集输入到预先构建好的基于深度时序图像学习的溜槽角度识别模型中进行模型训练的方法具体包括:
15、首先采用lstm网络模型提取溜槽图像的时空特征信息,选取最后一个lstm单元输出特征向量,然后利用全连接层将提取的特征向量映射为溜槽角度的类别,最后通过softmax函数对每个类别得分进行归一化,获得每个类别的概率,并输出最大概率的类别作为溜槽角度的预测值。
16、优选地,所述lstm网络模型引入三个门控机制,包括输入门、遗忘门和输出门,来控制信息的输入、更新和输出;其中所述输入门用于控制新信息的输入,所述遗忘门用于控制历史信息的保留,所述输出门用于控制输出的生成,三个门控机制共同组成了lstm网络模型的一个隐藏单元。
17、优选地,在步骤s4中,将实时采集的溜槽图像输入到训练好的基于深度时序图像学习的溜槽角度识别模型中进行预测,得到最终分类结果的方法具体包括:
18、将实时采集的溜槽图像输入到训练好的基于深度时序图像学习的溜槽角度识别模型中进行预测,由于溜槽旋转一圈的视频拆分成多个时序窗口,当一圈中出现多个不同类别结果,根据类别结果比例,将输出比例最大的类别结果作为该圈溜槽角度的最终分类结果。
19、所述当一圈中出现多个不同类别结果,根据类别结果比例,将输出比例最大的类别结果作为该圈溜槽角度的最终分类结果,具体包括:
20、假设n表示溜槽旋转一圈的总时序窗口数量,ci表示第i个时序窗口的诊断结果,则每个类别在整圈中出现的次数count(c)为:
21、
22、其中,[ci=c]是指示函数,c为溜槽实际角度,当ci等于c时取值为1,否则为0;
23、接着,计算每个类别在整个圈中出现的比例p(c)为:
24、
25、最后,输出该圈最终的结果,即占比最高的类别为:
26、
27、其中,argmax是对函数求参数的函数,用于输出出现次数最多的类别。
28、本发明实施例还提供了一种基于深度时序图像学习的溜槽角度异常诊断系统,用于实现上述所述的基于深度时序图像学习的溜槽角度异常诊断方法,所述系统包括:
29、溜槽数据采集模块,用于收集高炉炉顶监控视频数据,得到不同角度不同环境下的高炉溜槽视频;
30、数据预处理模块,用于对所述高炉溜槽视频进行预处理,得到溜槽角度视频数据集;
31、模型训练模块,用于将溜槽角度视频数据集输入到预先构建好的基于深度时序图像学习的溜槽角度识别模型中进行模型训练,得到训练好的基于深度时序图像学习的溜槽角度识别模型;
32、预测分类模块,用于将实时采集的溜槽图像输入到训练好的基于深度时序图像学习的溜槽角度识别模型中进行预测,得到最终分类结果;
33、角度异常诊断模块,用于将最终分类结果与设定的溜槽角度进行比对,判断溜槽角度是否异常。
34、本发明实施例还提供了一种电子装置,所述电子装置包括处理器、存储器和总线系统,所述处理器和存储器通过该总线系统相连,所述存储器用于存储指令,所述处理器用于执行存储器存储的指令,以实现上述所述的基于深度时序图像学习的溜槽角度异常诊断方法。
35、本发明实施例还提供了一种计算机存储介质,所述计算机存储介质存储有计算机软件产品,所述计算机软件产品包括的若干指令,用以使得一台计算机设备执行上述所述的基于深度时序图像学习的溜槽角度异常诊断方法。
36、从以上技术方案可以看出,本发明申请具有以下优点:
37、本发明实施例提供一种基于深度时序图像学习的溜槽角度异常诊断方法及系统,通过采集高炉溜槽不同角度旋转时的热成像视频,分析视频特征,本发明方法具有很强的实时性,相较于之前的机械测量方法,能够实现在溜槽运行期间对溜槽角度进行核验,大大降低了溜槽角度核验的难度,节约成本,减轻了潜在的隐患,实现了方便高效的溜槽角度核验。
- 还没有人留言评论。精彩留言会获得点赞!