目标追踪方法、装置、介质及电子设备与流程
本技术属于计算机视觉领域,涉及一种目标追踪方法,特别是涉及一种目标追踪方法、装置、介质及电子设备。
背景技术:
1、目标追踪是计算机视觉领域的一个重要研究方向,尤其在如无人驾驶、监控系统和机器人导航等领域具有广泛的应用。近年来,随着深度学习技术的快速发展,目标检测和追踪算法不断地取得重大的突破。
2、bytetrack是基于tracking-by-detection范式的跟踪方法。大多数多目标跟踪方法通过关联分数高于阈值的检测框来获取目标id。对于检测分数较低的目标,例如遮挡目标,会被简单的丢弃,这带来了不可忽略的问题,包括大量的漏检和碎片化轨迹。因此目前的目标追踪方法存在着目标在长时间、高频率被遮挡时产生的追踪丢失的问题。
技术实现思路
1、本技术的目的在于提供一种目标追踪方法、装置、介质及电子设备,用于解决目前的目标追踪方法存在着目标在长时间、高频率被遮挡时产生的追踪丢失的问题。
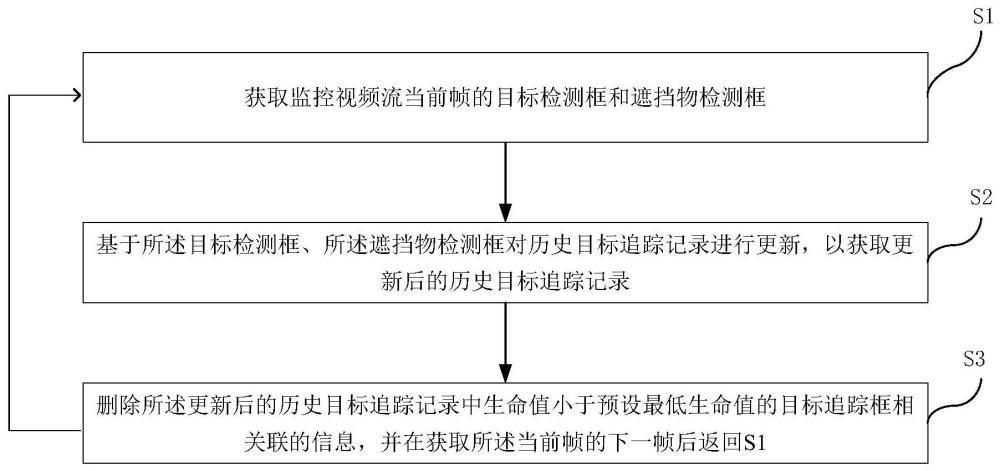
2、第一方面,本技术提供一种目标追踪方法,包括:s1,获取监控视频流当前帧的目标检测框和遮挡物检测框;s2,基于所述目标检测框、所述遮挡物检测框对历史目标追踪记录进行更新,以获取更新后的历史目标追踪记录,所述历史目标追踪记录包括目标追踪框的坐标、生命值、是否被遮挡及是否被匹配,在更新过程中若所述目标追踪框不与所述目标检测框匹配,则当所述目标追踪框被遮挡时,其生命值不变,当所述目标追踪框不被遮挡时,其生命值与预设生命变化量相减,否则所述目标追踪框的生命值与所述预设生命变化量相加;s3,删除所述更新后的历史目标追踪记录中生命值小于预设最低生命值的目标追踪框相关联的信息,并在获取所述当前帧的下一帧后返回s1,s1中的当前帧为所述当前帧的下一帧,s2中的所述历史目标追踪记录为所述更新后的历史目标追踪记录。
3、在所述目标追踪方法中,通过目标检测框和遮挡物检测框对目标追踪框的生命值进行调控,使其在被遮挡时生命值也不会低于预设最低生命值,从而能够保存目标被遮挡时的目标追踪信息,提供更加完整的历史目标追踪记录。
4、于本技术的一实施例中,基于所述目标检测框、所述遮挡物检测框对历史目标追踪记录进行更新,以获取更新后的历史目标追踪记录的实现方法包括:当所述目标检测框不存在时,基于所述遮挡物检测框对所述历史目标追踪记录进行更新,以获取所述更新后的历史目标追踪记录;当所述目标检测框存在时,基于所述目标检测框、所述遮挡物检测框对历史目标追踪记录进行更新,以获取所述更新后的历史目标追踪记录。
5、于本技术的一实施例中,当所述目标检测框存在时,基于所述目标检测框、所述遮挡物检测框对历史目标追踪记录进行更新,以获取更新后的历史目标追踪记录的实现方法包括:当所述历史目标追踪记录为空记录时,基于所述目标检测框对所述空记录进行更新,以获取所述更新后的历史目标追踪记录,所述更新后的历史目标追踪记录中目标追踪框的坐标为所述目标检测框的坐标、生命值为初始生命值、是否被遮挡为否、是否被匹配为否;当所述历史目标追踪记录不为空记录时,基于所述目标检测框、所述遮挡物检测框对所述历史目标追踪记录进行更新,以获取更新后的历史目标追踪记录。
6、于本技术的一实施例中,当所述历史目标追踪记录不为空记录时,基于所述目标检测框、所述遮挡物检测框对所述历史目标追踪记录进行更新,以获取更新后的历史目标追踪记录的实现方法包括:设置所述历史目标追踪记录中目标追踪框是否被遮挡为否、是否被匹配为否;基于预设目标重叠率阈值,对所述目标检测框和所述目标追踪框进行两两匹配,以获取第一次更新的历史目标追踪记录,当所述目标检测框与所述目标追踪框相匹配时,所述目标检测框是否被匹配更新为是、所述目标追踪框的坐标更新为所述目标检测框的坐标、是否被匹配更新为是、是否被遮挡更新为否、生命值与所述预设生命变化值相加;当所述目标检测框是否被匹配为否时,在所述第一次更新的历史目标追踪记录中生成新的目标追踪框相关联的信息,以获取第二次更新的历史目标追踪记录,所述新的目标追踪框的坐标为未匹配的目标检测框的坐标、是否被遮挡为否、生命值为所述初始生命值、是否被匹配为是;当所述第二次更新的历史目标追踪记录中存在未匹配的目标追踪框时,基于预设遮挡物重叠率阈值,对未匹配的目标追踪框与所述遮挡物检测框进行处理,以获取所述更新后的历史目标追踪记录。
7、于本技术的一实施例中,基于预设目标重叠率阈值,对所述目标检测框和所述目标追踪框进行两两匹配,以获取第一次更新的历史目标追踪记录的实现方法包括:基于所述目标检测框的坐标和所述目标追踪框的坐标,获取实际目标重叠率值,所述实际目标重叠率值为所述目标检测框与所述目标追踪框的交集面积与所述目标追踪框的面积的比;基于所述实际目标重叠率值和所述预设目标重叠率阈值,获取所述第一次更新的历史目标追踪记录,若所述实际目标重叠率值大于所述预设目标重叠率阈值,则所述目标检测框与所述目标追踪框相匹配,否则不相匹配。
8、于本技术的一实施例中,基于预设遮挡物重叠率阈值,对未匹配的目标追踪框与所述遮挡物检测框进行处理,以获取所述更新后的历史目标追踪记录的实现方法包括:当所述未匹配的目标追踪框的是否被遮挡为否时,基于所述未匹配的目标追踪框的坐标和所述遮挡物检测框的坐标,获取第一实际遮挡物重叠率值,所述第一实际遮挡物重叠率值为所述未匹配的目标追踪框与所述遮挡物检测框的交集面积与所述未匹配的目标追踪框的面积的比;基于所述第一实际遮挡物重叠率值和所述预设遮挡物重叠率阈值,获取所述更新后的历史目标追踪记录,若所述第一实际遮挡物重叠率值大于所述预设遮挡物重叠率阈值,则所述未匹配的目标追踪框是否被遮挡更新为是,否则生命值与所述预设生命变化量相减。
9、于本技术的一实施例中,当所述目标检测框不存在时,基于所述遮挡物检测框对所述历史目标追踪记录进行更新,以获取更新后的历史目标追踪记录的实现方法包括:设置所述历史目标追踪记录中目标追踪框是否被遮挡为否、是否被匹配为否;基于未遮挡的目标追踪框的坐标和所述遮挡物检测框的坐标,获取第二实际遮挡物重叠率值,所述第二实际遮挡物重叠率值为所述未遮挡的目标追踪框与所述遮挡物检测框的交集面积与所述未遮挡的目标追踪框的面积的比;基于所述第二实际遮挡物重叠率值和所述预设遮挡物重叠率阈值,获取所述更新后的历史目标追踪记录,若所述第二实际遮挡物重叠率值大于所述预设遮挡物重叠率阈值,则所述未遮挡的目标追踪框是否被遮挡更新为是,否则所述未遮挡的目标追踪框的生命值与所述预设生命变化量相减。
10、第二方面,本技术提供一种目标追踪装置,包括:检测框获取模块,用于获取监控视频流当前帧的目标检测框和遮挡物检测框;记录更新模块,用于基于所述目标检测框、所述遮挡物检测框对历史目标追踪记录进行更新,以获取更新后的历史目标追踪记录,所述历史目标追踪记录包括目标追踪框的坐标、生命值、是否遮挡及是否匹配,在更新过程中若所述目标追踪框不与所述目标检测框匹配,则当所述目标追踪框被遮挡时,其生命值不变,当所述目标追踪框不被遮挡时,其生命值减去预设生命变化值,否则所述目标追踪框的生命值加上所述预设生命变化值;信息删除模块,用于删除所述更新后的历史目标追踪记录中生命值小于预设最低生命值的目标追踪框相关联的信息,并在获取所述当前帧的下一帧后返回所述检测框获取模块,所述检测框获取模块中的当前帧为所述当前帧的下一帧。
11、第三方面,本技术提供一种计算机可读存储介质,其上存储有一计算机程序,该计算机程序被处理器执行时实现本技术第一方面任一项所述目标追踪方法。
12、第四方面,本技术提供一种电子设备,所述电子设备包括:存储器,存储有一计算机程序;处理器,与所述存储器通信相连,调用所述计算机程序时执行本技术第一方面任一项所述目标追踪方法。
13、如上所述,本技术所述目标追踪方法、装置、介质及电子设备,具有以下有益效果:
14、在所述目标追踪方法中,通过目标检测框和遮挡物检测框对目标追踪框的生命值进行调控,使其在被遮挡时生命值也不会低于预设最低生命值,从而能够保存目标被遮挡时的目标追踪信息,提供更加完整的历史目标追踪记录。
- 还没有人留言评论。精彩留言会获得点赞!