一种空气预热器转子局部堵灰预测方法及系统与流程
本发明涉及空气预热器,具体是一种空气预热器转子局部堵灰预测方法及系统。
背景技术:
1、在脱硝过程中,由于脱硝氨量过喷,造成氨逃逸在冷端产生具有腐蚀粘性的硫酸氢氨,最终空气预热器(简称空预器)将会造成堵塞。目前,多数的设备巡检、故障检测还是依靠现场工作人员进行人工分析诊断,这种传统的巡检故障方式不仅耗时长、危险性高、浪费人力物力,而且容易受到个人经验的影响。
2、西安理工大学李兵在2006年采用基于温度场分布分析的方法对空预器热点进行检测,在国内是较早使用温度场概念辅助分析空预器诊断的(李兵.基于温度场分布图的空预器热点检测系统研究[d].西安:西安理工大学,2006.)。吴军军提出基于红外阵列测温传感器的空预器热点检测方法,是红外热成像监测空预器的雏形(吴军军.基于红外阵列传感器的空气预热器热点检测系统研究[d].西安:西安理工大学,2010.)。王诚在2007年提出在linux环境下利用红外图像分析实现空预器监测(王诚.linux环境下基于红外图像分析的空预器热点监测系统应用研究[d].西安:西安理工大学,2007)。但上述方法由于测温传感器分辨率低,不能清晰成像,导致运行人员不能确认堵灰情况,实际应用效果不佳。
技术实现思路
1、为克服现有技术的不足,本发明提供了一种空气预热器转子局部堵灰预测方法及系统,解决现有技术存在的难以准确确认堵灰情况等问题。
2、本发明解决上述问题所采用的技术方案是:
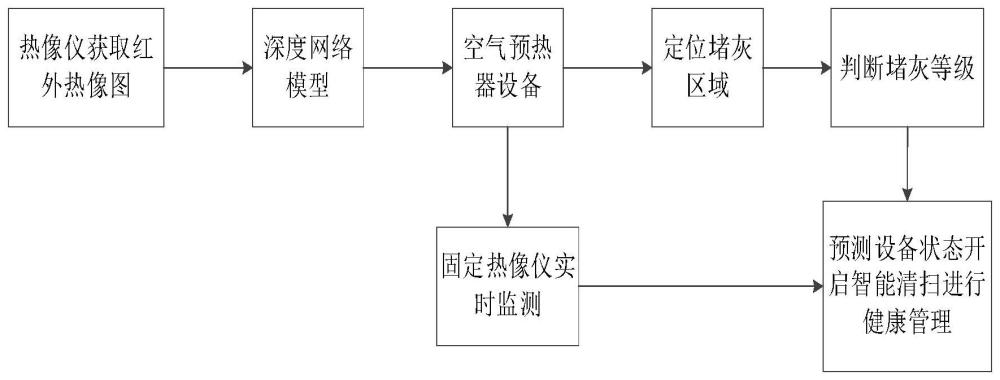
3、一种空气预热器转子局部堵灰预测方法,利用卷积神经网络对传感器采集到的空气预热器转子图像进行分析,对设定堵灰区域进行识别和定位。
4、作为一种优选的技术方案,包括以下步骤:
5、s1,传感器视角安装:确定安装传感器的位置并安装传感器;
6、s2,图像处理:对传感器采集到的空气预热器转子图像进行分析、存储与浏览,对设定堵灰区域进行识别和定位;
7、s3,自动监测报警:自动监测设定堵灰区域的堵灰情况并进行报警;
8、s4,统计监视:统计、存储、网络远程监视堵灰数据;
9、s5,蓄热元件吹扫提醒:某一区域堵灰程度达到设定的上限值时,开启蓄热元件吹扫功能;
10、s6,温度场分析、历史数据查询:分析温度场,查询堵灰历史数据。
11、作为一种优选的技术方案,步骤s1中,以视场角来确定安装传感器的位置,视场角可分为水平视场角和垂直视场角;
12、水平视场角计算公式如下:
13、
14、
15、其中:h为长边尺寸a与u像元间距的乘积;f为焦距;ah为水平视场角;
16、垂直视场角计算公式如下:
17、
18、
19、其中:h为短边尺寸b与u像元间距的乘积;f为焦距;ah为垂直视场角。
20、作为一种优选的技术方案,步骤s1中,步骤s2包括以下步骤:
21、s21,利用matlab图像处理软件包对原始图像进行变换,以达到扩充样本的目的;
22、s22,利用resize()函数,将采集到的原始数据转换成卷积神经网络训练需要的大小;再制作tfrecord数据集,读取tfrecord数据集获得图像及其标签,并保存相应的数据,作为后续训练的输入数据;
23、s23,利用步骤s22得到的图像训练卷积神经网络,对设定堵灰区域进行识别和定位。
24、作为一种优选的技术方案,步骤s22中,卷积神经网络包括依次连接的以下层:
25、输入层,输入数据为256*256*3的原始数据;
26、第一层:第一卷积层:卷积核为3*3*64,步长为1,填充设置为same,激活函数为relu,通过这一层得到的输出为:256*256*64的图像数据;
27、第二层:第一池化层:卷积核为2*2,步长为2,通过这一层得到的输出为:128*128*64的图像数据;池化之后,执行lrn()操作,局部响应归一化;
28、第三层:第二卷积层:卷积核为3*3*16,步长为1,填充设置为same,激活函数为relu,通过这一层得到的输出为:128*128*16的图像数据;
29、第四层:第二池化层:卷积核为2*2,步长为2,通过这一层得到的输出为:64*64*16的图像数据;池化之后,执行lrn()操作,局部响应归一化;
30、第五层:第一全连接层,128个神经元,将上一层中的输出矩阵重排为行向量,激活函数为relu;完成之后,执行drought操作;
31、第六层:第二全连接层,将上一层得到的1*1*128的列向量转换成2个类别打分。
32、作为一种优选的技术方案,第一卷积层中,卷积过程如公式(5)所示:
33、
34、其中:n*n为卷积核大小,i为特征图中行所在位置,j为特征图中列所在位置,wij为特征图第i行第j列位置上滤波器的权重参数,b为偏置量,xij为特征图第i行第j列位置上的像素值,y为输出值,再将该输出值y输入激活函数relu中,如公式(6)所示:
35、
36、其中:f(x)为特征图像对应的像素点的值。
37、作为一种优选的技术方案,第二全连接层中,使用tensorflow提供的tf.softmax_cross_entropy_with_logits函数来定义logit的交叉熵损失;交叉熵刻画的是实际输出的概率与期望输出的概率的距离,交叉熵的值越小,两个概率分布越接近,如公式(7)所示:
38、h(p,q)=-∑xp(x)logq(x) (7)
39、其中,p为期望的输出,q为实际的输出,h(p,q)为交叉熵。
40、作为一种优选的技术方案,步骤s23中,反向传播阶段使用自适应矩估计算法,对模型中的每一个参数计算自适应的学习率;
41、对设定堵灰区域进行识别和定位,采用slic超像素分割算法,将输入的彩色图像转化为cielab颜色空间和xy坐标下的5维特征向量,再对这5维特征向量构造距离度量标准,对图像像素进行局部聚类的过程;
42、聚类过程中,调整邻域种子点,方法为利用差分方式计算该邻域内所有像素点的梯度值,具体计算公式如公式(8)所示:
43、
44、以(0,0)为原点,水平向右为x轴正方向,竖直向下为y轴正方向,建立二维图像坐标系,(x,y)为每个像素块中心点的坐标,gradient(x,y)为梯度运算。
45、作为一种优选的技术方案,步骤s23中,调整完种子点之后进行像素点聚类,通过变换的欧式距离公式进行度量,具体计算公式如公式(9)所示:
46、
47、式中:dc表示颜色距离,ds表示空间距离,m为lab空间的距离可能最大值,m为图像在垂直方向上的像素数量,n为图像在水平方向上的像素数量,参数k为预像素数量。
48、一种空气预热器转子局部堵灰预测系统,用于实现所述的一种空气预热器转子局部堵灰预测方法,包括依次连接的以下模块:
49、传感器视角安装模块:用以,确定安装传感器的位置并安装传感器;
50、图像处理模块:用以,对传感器采集到的空气预热器转子图像进行分析、存储与浏览,对设定堵灰区域进行识别和定位;
51、自动监测报警模块:用以,自动监测设定堵灰区域的堵灰情况并进行报警;
52、统计监视模块:用以,统计、存储、网络远程监视堵灰数据;
53、蓄热元件吹扫提醒模块:用以,某一区域堵灰程度达到设定的上限值时,开启蓄热元件吹扫功能;
54、温度场分析、历史数据查询模块:用以,分析温度场,查询堵灰历史数据。
55、本发明相比于现有技术,具有以下有益效果:
56、(1)本发明利用红外热像仪实时采集空预器冷/热端转子视频,通过光纤传输通道输入计算机,在计算机进行视频处理;在视频处理环节中,基于先进的机器视觉技术并与转子蓄热元件稀疏的纹理特点相结合,在线进行精确、高速的转子堵灰检测;
57、(2)本发明软件结合现场工艺可实现实时在线报警、报表统计及堵灰程度分级处理等功能,实现对空预器蓄热元件状态的分析,为智能优化吹灰提供依据,从而保障空预器健康运行;
58、(3)本发明具有对获取到的视频流进行传感器视角安装,图像分析、存储与浏览,自动监测报警,数据统计存储、网络远程监视,蓄热元件吹扫提醒,温度场分析、历史数据查询等功能。
- 还没有人留言评论。精彩留言会获得点赞!