机器人控制方法、装置、电子设备以及存储介质与流程
本技术涉及机器人控制,尤其涉及一种机器人控制方法、装置、电子设备以及存储介质。
背景技术:
1、在商场等服务场所内,为降低人力成本并提供更高效的服务,主要利用机器人来执行相关任务,例如导航、送餐等。为了使机器人获取更多的环境信息用于导航和避障,主要利用深度相机获取点云数据,以识别地面和台阶之间的高度差,从而避免意外跌倒。
2、但是,当机器人经过电动扶梯时,由于电动扶梯与地面齐平,深度相机无法正确检测其存在,导致电动扶梯被错误地识别为平坦区域,使得机器人误将电动扶梯当做可通行区域。
技术实现思路
1、本技术的主要目的在于提供一种机器人控制方法、装置、电子设备以及存储介质,旨在解决机器人误将电动扶梯当做可通行区域的技术问题。
2、为实现上述目的,本技术提供一种机器人控制方法,包括:
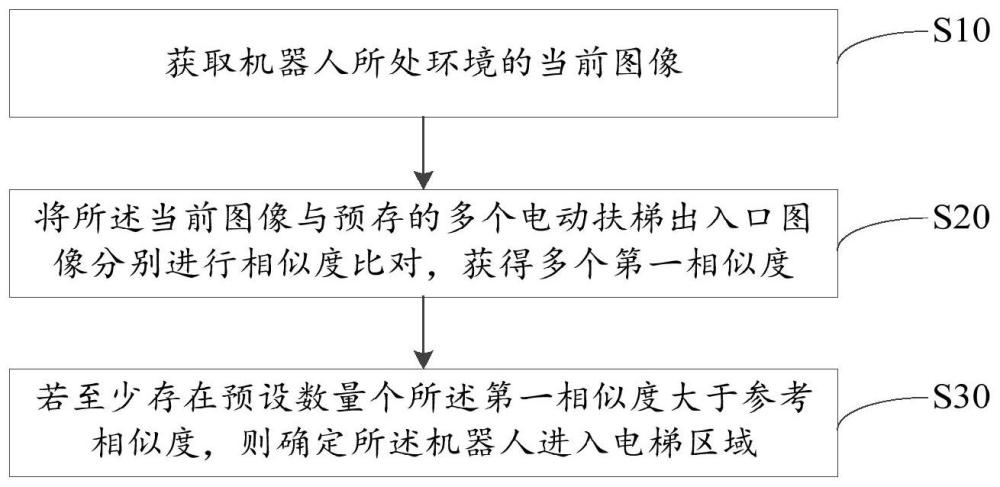
3、获取机器人所处环境的当前图像;
4、将所述当前图像与预存的多个电动扶梯出入口图像分别进行相似度比对,获得多个第一相似度;
5、若至少存在预设数量个所述第一相似度大于参考相似度,则确定所述机器人进入电动扶梯区域。
6、可选地,所述若至少存在预设数量个所述第一相似度大于参考相似度,则确定所述机器人进入电动扶梯区域,包括:
7、若至少存在预设数量个所述第一相似度大于参考相似度,则将所述当前图像和目标电动扶梯出入口图像进行特征点匹配;其中,目标电动扶梯出入口图像为所有所述第一相似度中最大值对应的所述电动扶梯出入口图像;
8、若特征点的匹配数量大于预设匹配数量,则确定所述机器人进入电动扶梯区域。
9、可选地,所述将所述当前图像与预存的多个电动扶梯出入口图像分别进行相似度比对,获得多个第一相似度,包括:
10、从所述当前图像的各第一区域中分别提取第一特征点,从各所述电动扶梯出入口图像的各第二区域中分别提取第二特征点;其中,所述第一区域为所述当前图像按照四叉树方法进行划分得到,所述第二区域为各电动扶梯出入口图像按照四叉树方法进行划分得到;
11、确定各所述第一特征点对应的第一描述子,以及与各所述电动扶梯出入口图像中的各所述第二特征点对应的第二描述子;
12、对所有所述第一描述子进行聚类处理,得到第一词袋向量,对各所述电动扶梯出入口图像中的所有所述第二描述子进行聚类处理,得到各所述电动扶梯出入口图像的第二词袋向量;
13、基于所述第一词袋向量以及各所述第二词袋向量,获得所述第一相似度。
14、可选地,所述将所述当前图像和目标电动扶梯出入口图像进行特征点匹配,包括:
15、对所述目标电动扶梯出入口图像对应的所有第二描述子进行编码处理,得到多个目标编码向量,对所述当前图像的所有描述子进行编码处理,得到多个第一编码向量;
16、对多个所述目标编码向量进行聚合处理,得到所述目标电动扶梯出入口图像对应的目标特征向量,对多个所述第一编码向量进行聚合处理,得到所述当前图像对应的第一特征向量;
17、利用所述目标特征向量以及所述第一特征向量,对所述当前图像和所述目标电动扶梯出入口图像进行特征点匹配。
18、可选地,所述当前图像为机器人的前向图像;
19、所述若特征点的匹配数量大于预设匹配数量,则确定所述机器人进入电动扶梯区域之后,所述方法还包括:
20、若特征点的匹配数量大于预设匹配数量,则确定特征点在所述当前图像中的分布区域;
21、若所述分布区域为当前图像的上部分区域,则输出减速指令,以使机器人基于减速指令执行减速操作;
22、若所述分布区域为当前图像的下部分区域,则输出跌落预警,以使机器人基于跌落预警暂停运行。
23、可选地,所述若至少存在预设数量个所述第一相似度大于参考相似度,则确定所述机器人进入电动扶梯区域之前,所述方法还包括:
24、在机器人启动后,获取机器人采集的实时图像帧序列,所述实时图像帧序列包括按照时间排序的多个实时图像帧;
25、从多个所述实时图像帧中,确定出与所述实时图像帧序列中的首帧图像帧的相似度小于预设相似度的参考图像帧;其中,所述预设相似度基于预设占比以及实际相似度确定,所述实际相似度为参考图像帧与相邻实时图像帧之间的相似度,所述相邻实时图像帧的采集时间晚于所述参考图像帧;
26、从所述参考图像帧之后的所有所述实时图像帧中,确定出与所述参考图像帧的相似度小于预设相似度的比较图像帧,并获得所述比较图像帧的累计数量;
27、基于所述比较图像帧,更新所述参考图像帧,并返回执行从所述参考图像帧之后的所有所述实时图像帧中,确定出与所述参考图像帧的相似度小于预设相似度的比较图像帧,直至所述累计数量等于预设数量;
28、将所有所述比较图像帧与多个所述电动扶梯出入口图像分别进行相似度比对,获得多个第二相似度;
29、将所有所述第二相似度的平均值作为所述参考相似度。
30、可选地,所述将所述当前图像与预存的多个电动扶梯出入口图像分别进行相似度比对,获得多个第一相似度之前,所述方法还包括:
31、根据预设采集点序列和所述预设采集点序列中各所述预设采集点位对应的采集方向,控制机器人在预设电动扶梯出入口区域采集得到多帧采集图像;其中,预设采集点序列中包括至少一个设置在电动扶梯区域的内铁板中心点上的预设采集点、至少一个设置在电动扶梯区域外铁板靠近内铁板一侧的预设采集点,和至少一个设置在外铁板远离内铁板一侧的预设采集点中的至少一者;
32、若相邻两个所述预设采集点位对应的两帧采集图像的第三相似度在预设阈值范围内,则将所述两帧所述采集图像均作为所述电动扶梯出入口图像。
33、第二方面,本技术提供一种机器人控制装置,所述机器人控制装置包括:
34、获取模块,用于获取机器人所处环境的当前图像;
35、比对模块,用于将所述当前图像与预存的多个电动扶梯出入口图像分别进行相似度比对,获得多个第一相似度;
36、确认模块,用于若至少存在预设数量个所述第一相似度大于参考相似度,则确定所述机器人进入电动扶梯区域。
37、第三方面,本技术提供一种电子设备,包括:处理器,存储器以及存储在所述存储器中的机器人控制程序,所述机器人控制程序被所述处理器运行时实现如上任一项所述机器人控制方法的步骤。
38、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质上存储有机器人控制程序,所述机器人控制程序被处理器执行时实现如上任一项所述的机器人控制方法。
39、本技术实施例提出的一种机器人控制方法,获取机器人所处环境的当前图像;将所述当前图像与预存的多个电动扶梯出入口图像分别进行相似度比对,获得多个第一相似度;若至少存在预设数量个所述第一相似度大于参考相似度,则确定所述机器人进入电动扶梯区域,也即是本技术实施例中的多个电动扶梯出入口图像可以覆盖电动扶梯出入口区域的外观特征,通过比对当前图像与多个电动扶梯出入口之间的第一相似度,实质是比对当前图像中的物体的特征与电动扶梯出入口区域的外观特征的相似度的方式,确定机器人与电动扶梯之间的位姿关系,相较于相关技术中,利用深度相机获取点云数据,识别地面和台阶之间的高度差,可以避免机器人将电动扶梯被当做可通行区域。
- 还没有人留言评论。精彩留言会获得点赞!