一种无人机集群协同工作的长滞空飞行优化方法和装置
本发明属于无人机飞行领域,具体地,涉及一种无人机集群协同工作的长滞空飞行优化方法和装置。
背景技术:
1、传统的小型无人机依赖自身动力实现飞行,但由于机身尺寸和载荷能力的限制,机载能源有限,限制了无人机的续航能力,长滞空飞行策略旨在通过对自然界滑翔和翱翔鸟类的飞行行为进行仿生,基于该策略设计的无人机可以借助自然界风的力量实现自主滑翔飞行,降低无人机自身动力的使用频率和功率,实现增加无人机航程和航时的能力;传统的小型无人机在高原地区会面对高原山地气流环境复杂、空气密度低、低温环境问题,对无人机的飞行稳定性、飞行性能、设备性能造成了极大的考验,长滞空飞行策略旨在通过主动利用自然界风场的力量,其中包含了垂直热气流、山地斜坡气流、对流天气和高原风等典型高原山地气流特征,基于长滞空飞行策略而设计的无人机拥有更好的高原山地环境飞行能力;
2、目前市面上的小型固定翼无人机的续航时件大都不超过6小时,这是因为受到机体大小和载荷能力的限制,导致无人机搭载的能源受到限制,有限的能源限制了无人机的滞空时间。通常提高固定翼无人机的续航时间方法有如下几种:其一,优化固定翼无人机的气动布局,使其拥有更加优异的气动性能;其二,采用机体表面铺设太阳能板辅助供电,增加电源的续航能力;其三,优化巡航段的航迹规划方法,使固定翼无人机始终处在最优巡航路径。但以上方法均不适用于高原山地环境下小型固定翼无人机的长滞空飞行。
3、青藏高原地区,秃鹫可以利用垂直热气流、山地斜坡气流、对流天气和高原风等典型高原山地气流实现长时间的盘旋、翱翔。通过研究总结秃鹫利用高原山地气流飞行的方法,并且应用于固定翼无人机的控制,可以大大增加无人机的滞空能力。长滞空飞行策略可以实现的基础在于固定翼飞机对自然界风力的有效利用,这意味着该飞行策略不会局限于只有小型固定翼无人机可以使用,这种飞行策略在所有的固定翼航空器上都可以得到有效地利用,例如运输机、通用飞机、大型无人机等固定翼飞机;
4、因此,亟需一种无人机集群协同工作的长滞空飞行优化的技术方案,长滞空飞行策略可以依托无人机集群方案,可以实现更高效的气流探测和全空域气流模型建立,最终获得更优的长滞空飞行方案。
技术实现思路
1、本发明的主要目的在于提供一种无人机集群协同工作的长滞空飞行优化方法和装置,用于解决当前复杂地形环境下的无人机飞行滞空时间短的问题。
2、根据本发明第一方面,本发明请求保护一种无人机集群协同工作的长滞空飞行优化方法,其特征在于,包括步骤:
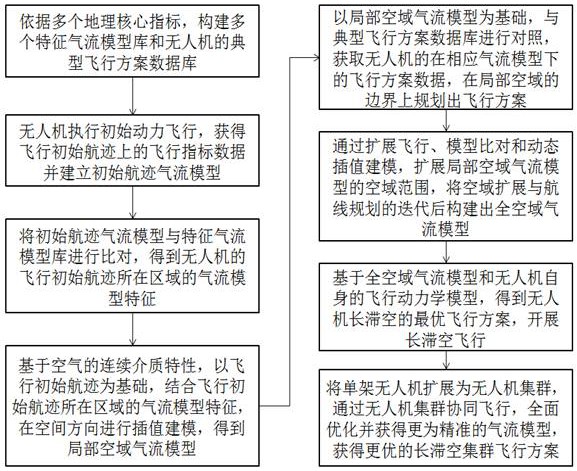
3、依据多个地理核心指标,构建多个特征气流模型库和无人机的典型飞行方案数据库;
4、无人机执行初始动力飞行,获得飞行初始航迹上的飞行指标数据并建立初始航迹气流模型;
5、将初始航迹气流模型与特征气流模型库进行比对,得到无人机的飞行初始航迹所在区域的气流模型特征;
6、基于空气的连续介质特性,以飞行初始航迹为基础,结合飞行初始航迹所在区域的气流模型特征,在空间方向进行插值建模,得到局部空域气流模型;
7、以局部空域气流模型为基础,与典型飞行方案数据库进行对照,获取无人机的在相应气流模型下的飞行方案数据,在局部空域的边界上规划出飞行方案;
8、通过扩展飞行、模型比对和动态插值建模,扩展局部空域气流模型的空域范围,将空域扩展与航线规划的迭代后构建出全空域气流模型;
9、基于全空域气流模型和无人机自身的飞行动力学模型,得到无人机长滞空的最优飞行方案,开展长滞空飞行;
10、将单架无人机扩展为无人机集群,通过无人机集群协同飞行,全面优化并获得更为精准的气流模型,获得更优的长滞空集群飞行方案,具体包括:
11、将单架无人机扩展为无人机集群,通过无人机集群协同飞行,全面优化并获得更为精准的气流模型,获得更优的长滞空集群飞行方案,具体包括:
12、无人机飞行的全空域内划分为多片局部空域,每一个局部空域具有一架无人机进行工作;
13、探测航迹气流,多架无人机之间通过信息交互的方式同时获取全空域内,不同局部空域的气流信息,增加气流探测效率;
14、每架无人机搭载机载电脑用于气流模型的参数化建模;
15、无人机集群激活容错机制,当部分无人机出现意外事故时,无人机集群的整体性能不受影响。
16、优选的,依据多个地理核心指标,构建多个特征气流模型库和无人机的典型飞行方案数据库,具体包括:
17、多个地理核心指标至少包括气压、风速、风向、温度、海拔高度、地形、边界条件;
18、多个特征气流模型库至少包括垂直热气流特征气流模型库、山地斜坡气流特征气流模型库、对流性天气特征气流模型库和高原季风特征气流模型库;
19、无人机的典型飞行方案至少包括长直滑翔、水平盘旋、斜面盘旋、螺旋飞行;
20、构建多个特征气流模型库,具体包括:
21、通过gis地理信息,对指定地形特征逆向建模,形成地形的三维数字模型,使用计算流体力学方法建立基于该指定地形的风场数字化模型,通过计算获取气流特征;
22、无人机的典型飞行方案数据库的构建,包括:
23、基于多个特征气流模型库测算无人机典型飞行方案的滞空效能,获得不同气流模型对无人机飞行的增益效果和无人机自身动力学性能,建立典型飞行方案数据库。
24、优选的,无人机执行初始动力飞行,获得飞行初始航迹上的飞行指标数据并建立初始航迹气流模型,具体包括:
25、飞行指标数据至少包括:aoa、aos、气压、风速、风向、温度、海拔高度、地形、边界条件;
26、由无人机搭载的航空气象探测设备和飞行传感器获得经过飞行初始航迹上的飞行指标数据;
27、使用计算机构建初始航迹气流模型。
28、优选的,基于空气的连续介质特性,以飞行初始航迹为基础,结合飞行初始航迹所在区域的气流模型特征,在空间方向进行插值建模,得到局部空域气流模型,具体包括:
29、根据无人机在飞行初始航迹上得到的所在区域的气流模型特征,利用空气的连续介质特性,向空间六个方向上使用数学差值建模的方法,拓展初始航迹气流模型的空间范围,获得局部空域气流模型。
30、优选的,以局部空域气流模型为基础,与典型飞行方案数据库进行对照,获取无人机的在相应气流模型下的飞行方案数据,在局部空域的边界上规划出飞行方案,具体包括:
31、依靠局部空域气流模型中的上升气流,托举无人机呈螺旋式上升;
32、当无人机上升至无法借助上升气流的空域时,无人机脱离上升气流,进行无动力滑翔,将重力势能转化为动能;
33、当无人机下降至一定高度时,再次利用上升气流进行飞行,之后,无人机借助自然风力飞行,没有使用自身动力或者降低自身动力的使用频率和使用功率。
34、优选的,通过扩展飞行、模型比对和动态插值建模,扩展局部空域气流模型的空域范围,将空域扩展与航线规划的迭代后构建出全空域气流模型,具体包括:
35、扩展飞行为依据建立的局部空域气流模型和飞行方案,无人机在初始航线的基础上,偏移飞行航线,拓展飞行区域,依托自然风进行无动力盘旋和滑翔,在必要时使用动力进行辅助飞行;
36、模型比对为初始航迹气流模型和特征气流模型库的比对,局部空域气流模型和典型飞行方案数据库的比对;
37、无人机通过扩展飞行,持续收集飞行轨迹上的气流特征,基于模型比对和动态插值建模的方法,不断完善空域内的气流模型,最终使气流模型覆盖整个空域,得到全空域气流模型。
38、优选的,基于全空域气流模型和无人机自身的飞行动力学模型,得到无人机长滞空的最优飞行方案,开展长滞空飞行,具体包括:
39、基于全空域气流模型,无人机在空域内飞行时持续预测航线上的气流特征;
40、根据航线上的气流变化,无人机规划出在航线上最优飞行方案;
41、空域内所有航线上的最优飞行方案的集合就是最优长滞空飞行策略;
42、长滞空飞行策略就是无人机利用自然风力实现无动力的盘旋和滑翔飞行或使用有限动力的飞行方式,减少无人机自身动力的使用频率和使用功率,降低无人机自身能源的消耗,达到长滞空飞行的目的;
43、最优飞行方案的参数至少包含空速、低速、迎角、侧滑角、高度、温度、气压、电量、油门。
44、优选的,所述无人机集群在滑翔过程进行列队,保证所述无人机之间的安全距离的同时,将最前方的无人机作为中心主机,形成中部凸出,左右侧边的无人机向左右方向排开且逐渐靠后的队形;
45、所述无人机之间通过信息交互的方式同时获取全体无人机的动力余量,滑翔过程中当作为中心主机的无人机动力余量降为全体无人机中最低时,与动力余量最高的无人机进行位置互换,一并交换设定任务,动力余量最高的无人机位置互换完成后作为新的中心主机;
46、所述无人机之间通过信息交互的方式同时获取全空域内存在的上升气流信息,当所述无人机下降至一定高度需要再次利用上升气流进行飞行时,飞行至附近的上升气流所在位置依靠上升气流托举所述无人机呈螺旋式上升,没有使用自身动力或者降低自身动力的使用频率和使用功率,当所述无人机上升至无法借助上升气流的空域时,所述无人机脱离上升气流,与全体无人机再次列队滑翔,继续进行设定任务。
47、优选的,所述动力余量包括位置互换前的动力余量和位置互换完成后的动力余量,作为中心主机的无人机选择与位置互换完成后动力余量最高的无人机进行位置互换,因此在进行位置互换的步骤之前还包括确定位置互换完成后动力余量最高的无人机,具体包括:
48、获取每一架所述无人机达到所述中心主机需要经过的相对路径,根据所述相对路径得到路径中经过的所述局部空域;
49、调取所述局部空域对应的所述无人机所探测到的气流模型,得到无人机经过相应气流模型到达所述中心主机位置的飞行方案数据;
50、每一架无人机根据所述飞行方案数据,模拟运动至所述中心主机的位置,得到每一架无人机运动至所述中心主机的位置所需的动力量;
51、每一架无人机位置互换前的动力余量减去无人机运动至所述中心主机的位置所需的动力量,得到每一架无人机到达所述中心主机的位置后的动力余量,确定位置互换完成后动力余量最高的无人机。
52、根据本发明第二方面,本发明请求保护一种无人机集群协同工作的长滞空飞行优化装置,其特征在于,包括:
53、数据库模块,包括多个特征气流模型库和无人机的典型飞行方案数据库,多个特征气流模型库和无人机的典型飞行方案数据库依据多个地理核心指标构建;
54、气流模型构建模块,用于构建初始航迹气流模型、区域气流模型、局部空域气流模型;
55、初始航迹气流模型由无人机执行初始动力飞行时获得飞行初始航迹上的飞行指标数据并建立;
56、区域气流模型属于无人机的飞行初始航迹所在区域,通过将初始航迹气流模型与特征气流模型库进行比对得到;
57、局部空域气流模型通过基于空气的连续介质特性,以飞行初始航迹为基础,结合飞行初始航迹所在区域的气流模型,在空间方向进行插值建模得到;
58、方案规划模块,用于规划在局部空域的边界上的飞行方案,通过以局部空域气流模型为基础,与典型飞行方案数据库进行对照,获取无人机的在相应气流模型下的飞行方案数据;
59、全空域模型构建模块,用于构建全空域气流模型,通过通过扩展飞行、模型比对和动态插值建模,扩展局部空域气流模型的空域范围,将空域扩展与航线规划的迭代后构建出;
60、长滞空方案构建模块,基于全空域气流模型和无人机自身的飞行动力学模型,得到无人机长滞空的最优飞行方案,开展长滞空飞行;
61、集群飞行方案构建模块,用于将单架所述无人机扩展为无人机集群,通过所述无人机集群协同飞行,全面优化并获得更为精准的气流模型,获得更优的长滞空集群飞行方案,具体包括:
62、所述无人机飞行的全空域内划分为多片局部空域,每一个所述局部空域设置有一架无人机进行工作;
63、探测航迹气流,多架所述无人机之间通过信息交互的方式同时获取全空域内,不同局部空域的气流信息,增加气流探测效率;
64、每架所述无人机搭载机载电脑用于气流模型的参数化建模;
65、所述无人机集群激活容错机制,当部分所述无人机出现意外,没有继续进行设定任务时,无人机集群的整体性能不受影响。
66、本发明中长滞空飞行策略的本质是利用自然界存在的风力来辅助无人机进行飞行,使无人机实现无动力飞行或者降低自身动力的使用频率和功率,减少由动力造成的能量消耗,从而达到增加无人机航时和航程的目的;该长滞空飞行策略通过建立气流模型库,使无人机可以通过收集初始飞行数据和气流模型库进行特征比对,建立局部空域的气流模型;长滞空飞行策略通过拓展飞行、模型比对和动态插值建模,不断拓展气流空域,最终实现全空域气流建模;长滞空飞行策略通过建立飞行方案库,使无人机结合建立的局部和全局空域气流模型,使无人机可以规划出最有益的飞行方案,高效的借助自然风力飞行,并且保持自身的稳定性,具备很好的抗风能力。
- 还没有人留言评论。精彩留言会获得点赞!