一种海上风电场的智能驱鸟方法及系统与流程
本技术涉及电力安全,具体涉及一种海上风电场的智能驱鸟方法及系统。
背景技术:
1、海上风电场是指在海洋中建设的风电场,其利用海上风能发电,通常建设在沿海地区的海上风电场基地,具有环保、节能、可持续等诸多优势。
2、然而,随着海上风电场规模的不断扩大和数量的增加,越来越多的鸟类会在海上风电场附近出没,这不仅会对风力发电设施造成碰撞风险,而且鸟类的排泄物还会对风力发电设备的表面和内部部件造成腐蚀,导致设备的寿命缩短和性能下降。这些问题不仅会增加海上风电场的运营和维护成本,而且还会对环境保护和能源利用带来负面影响,严重威胁到海洋生态环境和风力发电设施的安全性。
3、目前,常用的驱鸟方法主要包括如激光干扰、无人机驱鸟、智能音响驱鸟等。然而,这些驱鸟方法仍存在着一些不足,如激光干扰对鸟类眼睛的伤害,声音干扰的效果不稳定、无人机驱鸟的高成本和操作难度等,整体导致驱鸟效果差。
技术实现思路
1、有鉴于此,本技术实施例提供了一种海上风电场的智能驱鸟方法及系统,增强了驱鸟的准确率和可靠性,有效地驱赶鸟类,降低碰撞风险。
2、第一方面,本技术提供了一种海上风电场的智能驱鸟方法,所述方法包括:
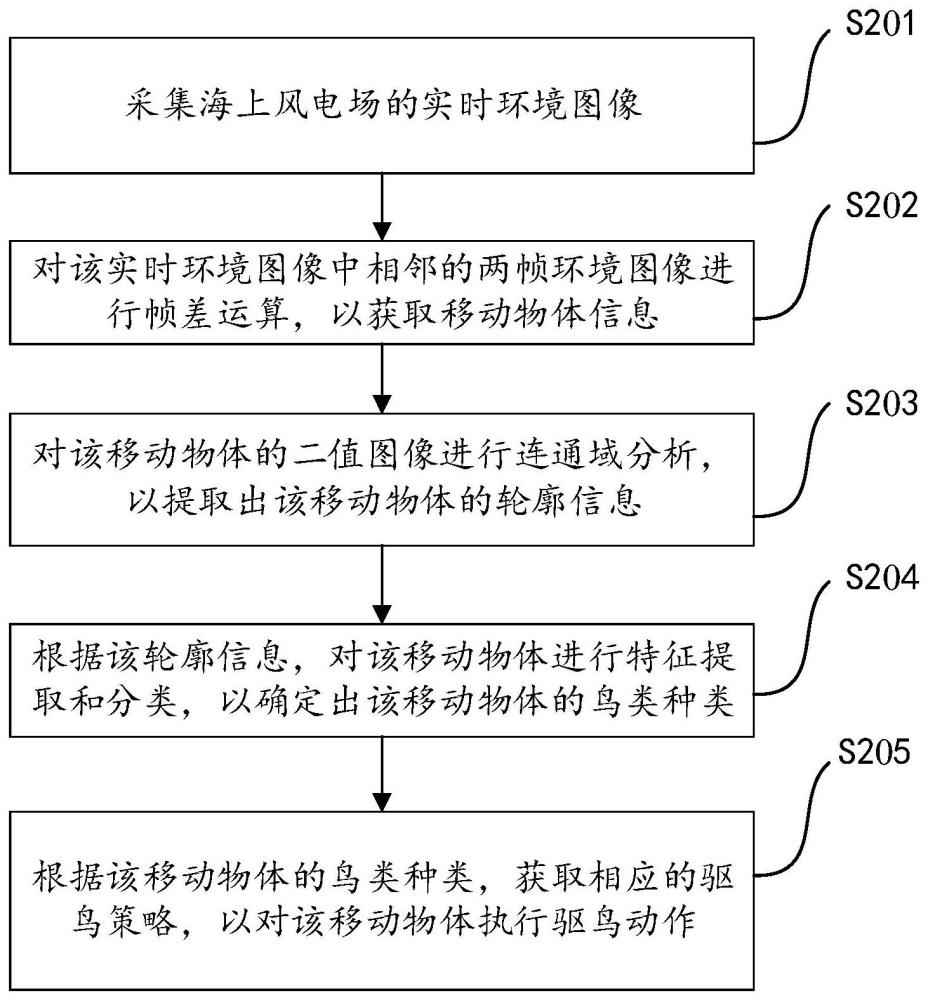
3、采集海上风电场的实时环境图像;
4、对所述实时环境图像中相邻的两帧环境图像进行帧差运算,以获取移动物体信息;所述移动物体信息包括移动物体以及所述移动物体的二值图像;
5、对所述移动物体的二值图像进行连通域分析,以提取出所述移动物体的轮廓信息;
6、根据所述轮廓信息,对所述移动物体进行特征提取和分类,以确定出所述移动物体的鸟类种类;
7、根据所述移动物体的鸟类种类,获取相应的驱鸟策略,以对所述移动物体执行驱鸟动作。
8、根据上述技术手段,本技术通过摄像头采集海上风电场的实时环境图像,采用帧差运算识别移动物体,提取出移动物体信息,识别出鸟类后通过相应的驱鸟策略联动驱鸟设备如驱鸟广播、智能机器人执行驱鸟动作,从而有效地驱赶鸟类,降低碰撞风险。
9、结合第一方面,在一种实施方式中,在所述对所述实时环境图像中相邻的两帧环境图像进行帧差运算之前,所述方法还包括:
10、对所述实时环境图像进行图像预处理,并获取预处理后的实时环境图像;所述图像预处理包括图像颜色空间转换处理、图像滤波处理以及二值化处理。
11、结合第一方面,在一种实施方式中,所述对所述实时环境图像中相邻的两帧环境图像进行帧差运算,以获取移动物体信息,包括:
12、对所述实时环境图像中相邻的两帧环境图像进行帧差运算;
13、当所述两帧环境图像的相应位置处的像素值之差的绝对值大于设定值时,判定所述两帧环境图像中存在移动物体,并获取移动物体信息。
14、结合第一方面,在一种实施方式中,所述对所述移动物体的二值图像进行连通域分析,以提取出所述移动物体的轮廓信息,包括:
15、基于机器视觉库对所述移动物体的二值图像进行连通域分析,以提取出所述移动物体的轮廓信息;
16、所述根据所述轮廓信息,对所述移动物体进行特征提取和分类,以确定出所述移动物体的鸟类种类,包括:
17、将所述轮廓信息与鸟类数据库中的鸟类数据进行比对,以确定出所述移动物体的鸟类种类。
18、结合第一方面,在一种实施方式中,所述鸟类数据库中存储了所述海上风电场内的鸟类信息,所述鸟类信息包括鸟的种类、名称以及多种姿态下的轮廓信息。
19、结合第一方面,在一种实施方式中,所述驱鸟策略包括不同种类的鸟类所对应的固定频率的广播驱鸟策略、全地形机器人驱鸟策略以及混合驱鸟策略中的至少一者。
20、根据上述技术手段,本技术通过智能图像识别鸟类种类,并针对不同鸟类种类采用不同的驱鸟策略(如播放不同的驱鸟声音、智能机器人动作驱鸟),增强了驱鸟的准确率和可靠性。
21、结合第一方面,在一种实施方式中,在所述对所述移动物体进行驱鸟动作之后,所述方法还包括:
22、对所述相邻的两帧环境图像的对应区域进行二次识别;
23、当所述相邻的两帧环境图像的对应区域中还存在所述移动物体时,对所述移动物体的驱鸟策略的驱鸟效果进行存储并反馈;
24、根据所述驱鸟效果,计算所述移动物体的驱鸟策略的成功率,以对所述驱鸟策略进行修改并更新。
25、根据上述技术手段,本技术通过存储反馈的驱鸟效果,计算各驱鸟策略的成功率,对成功率低的驱鸟策略进行调整,达到识别准确率高、驱鸟效果好、稳定性和可靠性强的目标效果。
26、第二方面,本技术提供了一种海上风电场的智能驱鸟系统,所述系统包括:相互通讯连接的云平台、采集端以及动作端;所述采集端和所述动作端设置在海上风电场的海上升压站上;
27、所述云平台包括数据分析模块以及指令模块;所述数据分析模块,用于处理所述采集端所采集的海上风电场的实时环境图像,获取移动物体信息,并确定出移动物体的鸟类种类;所述指令模块,用于根据所述移动物体的鸟类种类,获取相应的驱鸟策略以及驱鸟指令;
28、所述动作端,用于根据所述驱鸟策略以及所述驱鸟指令,对所述移动物体执行驱鸟动作。
29、结合第二方面,在一种实施方式中,所述采集端包括多个摄像头以及多个传感器,所述摄像头和所述传感器分别安装在所述海上升压站的各个位置,以监测移动物体,并获取所述移动物体的分布和数量。
30、结合第二方面,在一种实施方式中,所述云平台还包括反馈更新模块,所述反馈更新模块包括检测组、统计组以及更新组;
31、所述检测组,用于在所述动作端结束驱鸟动作后,进行二次识别,以确定所述驱鸟策略的驱鸟效果;
32、所述统计组,用于根据所述驱鸟效果,计算所述移动物体的驱鸟策略的成功率,并对成功率低于目标成功率的驱鸟策略进行标记;
33、所述更新组,用于对所述统计组标记出的驱鸟策略进行修改并更新。
34、第三方面,本技术提供了一种海上风电场的智能驱鸟装置,所述装置包括:
35、实时环境图像采集模块,用于采集海上风电场的实时环境图像;
36、移动物体信息获取模块,用于对所述实时环境图像中相邻的两帧环境图像进行帧差运算,以获取移动物体信息;所述移动物体信息包括移动物体以及所述移动物体的二值图像;
37、轮廓信息获取模块,用于对所述移动物体的二值图像进行连通域分析,以提取出所述移动物体的轮廓信息;
38、鸟类种类获取模块,用于根据所述轮廓信息,对所述移动物体进行特征提取和分类,以确定出所述移动物体的鸟类种类;
39、驱鸟策略获取模块,用于根据所述移动物体的鸟类种类,获取相应的驱鸟策略,以对所述移动物体执行驱鸟动作。
40、第四方面,本技术提供了一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现上述的一种海上风电场的智能驱鸟方法。
41、第五方面,本技术提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述的一种海上风电场的智能驱鸟方法。
42、本技术提供的技术方案可以包括以下有益效果:
43、本技术通过摄像头采集海上风电场的实时环境图像,采用帧差运算识别移动物体,提取出移动物体信息,识别出鸟类后,针对不同鸟类种类采用不同的驱鸟策略(如播放不同的驱鸟广播、智能机器人动作驱鸟)执行驱鸟动作,增强了驱鸟的准确率和可靠性,从而有效地驱赶鸟类,降低碰撞风险;此外,本技术还通过存储反馈的驱鸟效果,计算各驱鸟策略的成功率,对成功率低的驱鸟策略进行调整,以达到识别准确率高、驱鸟效果好、稳定性和可靠性强的目标效果。
- 还没有人留言评论。精彩留言会获得点赞!