一种便于有限元设置的齿轮参数化建模与自动化分析方法
本发明涉及齿轮建模领域,尤其是一种便于有限元设置的齿轮参数化建模与自动化分析方法。
背景技术:
1、由于能源消耗和空气污染问题,对新能源汽车,尤其是电动汽车的需求不断增加。由于电动汽车无法掩盖发动机噪音,因此对包含齿轮传动系统的动力总成系统的降噪提出了更高的要求。而对于齿轮的减振降噪来说,其中求解激励源是优化的前提与基础。它产生的动态啮合力会通过轴和轴承传递给减速器壳体,从而引起振动噪声。
2、求解齿轮系统激励源的方法目前主要分为解析法、近似解析法、有限元-解析法和有限元法。解析法和近似解析法求解时间较短,但普适性不高,针对不同的齿轮需要采用有限元求解的参数进行修正。有限元法是获取激励源最准确的方法,但其前处理繁琐,计算成本较高,在验证其他方法准确性时应用广泛。而有限元-解析法则是将齿轮的网格密度降低来减少求解时间,同时引入接触势能的解析法使结果精度提高的改进方法。可以看出,在求解齿轮系统激励源的方法中,无论是解析法所需的验证模型与修正模型,还是有限元法都需要一个精确的三维网格模型。
3、齿轮的三维有限元建模方法可分为两种,一种是利用商业软件或逆向建模软件生成cad实体模型后进行手动网格划分,这种方法参数化程度不高,其有限元前处理时间较长。因而在此基础上发展了节点单元生成法,即根据程序直接生成模型的节点和对应的连接单元。但这种方法仅生成了单元节点文件,在模型文件导入有限元后还需手动进行后续设置,并未实现完全参数化分析。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种便于有限元设置的齿轮参数化建模与自动化分析方法。
2、本发明的目的可以通过以下技术方案来实现:
3、一种便于有限元设置的齿轮参数化建模与自动化分析方法,该方法包括以下步骤:
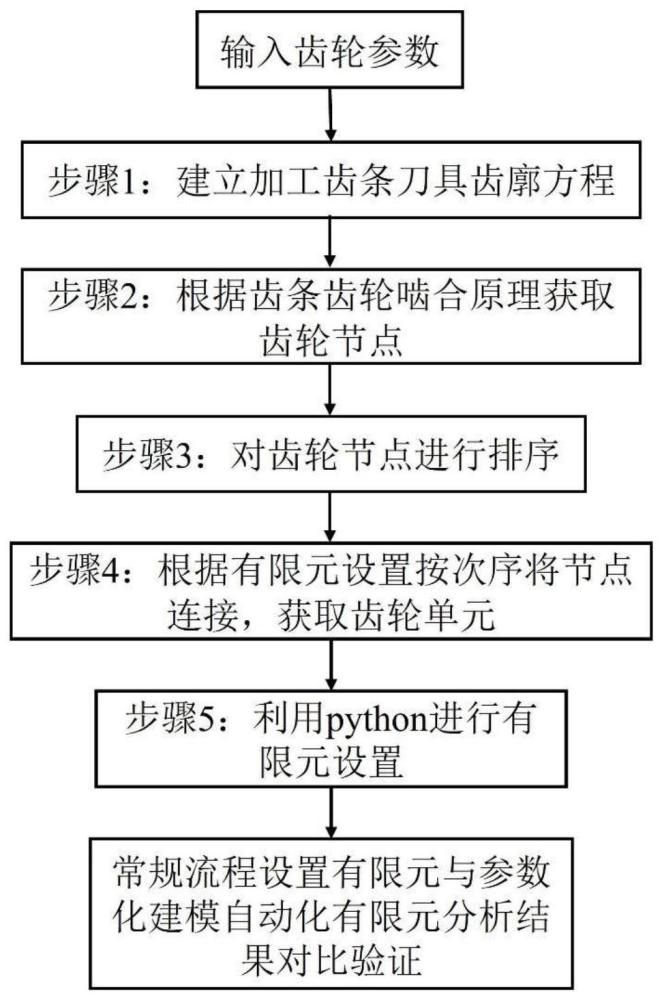
4、步骤1,建立切割轮坯的齿条刀具方程;
5、步骤2,基于坐标变换方程与齿轮齿条啮合原理插值求出齿轮的节点;
6、步骤3,对齿轮节点进行排序以方便单元的连接;
7、步骤4,将相邻节点连接构成单元,同时按便于有限元设置的次序对齿轮单元排序;
8、步骤5,联动编程软件,生成节点单元(使用matlab程序完成,方法为现有技术),设置有限元软件(利用python脚本完成),利用有限元软件实现自动建模与有限元分析。
9、优选地,所述的步骤1具体为:
10、坐标系s1(o1-x1y1z1)建立在齿条刀具上,y1、z1建立在俯仰平面上,y1轴与齿条刀具节线重合,x1轴与刀具轮廓的对称线重合,并垂直于俯仰平面,以齿条齿槽的节线中心作为坐标系s1的原点中心o1,构造齿条刀具的方程,可分为三个部分:
11、
12、
13、
14、
15、其中m10为二维端面到三维齿条的坐标变换矩阵,β为斜齿轮螺旋角,lz为原点o1沿齿条螺旋角方向的距离;
16、为齿条直线段cd的方程,刀具直线段cd切割轮坯形成渐开线部分,l1代表cd上的点距离直线最下端c处的距离,mn是齿轮法向模数,mt是齿轮端面模数,±分别代表齿条刀具的左侧和右侧,xn1是变位系数,αt为端面压力角,是齿顶高系数;
17、为齿条弧线段bc的方程,刀具弧线段bc切割轮坯形成齿轮过渡曲线部分,ρ为刀尖圆弧半径;θ1为刀尖圆弧处的角度参变数,数值随bc位置上不同的点而变化;
18、为齿条齿根处直线ab段的方程,刀具齿根直线段ab切割轮坯形成齿轮齿根部分,为顶隙系数,e1为ab段上的点距离直线最左侧点a的距离;ef为过渡曲线bc的圆心与刀具端部轮廓最外侧之间的距离,其中ρ和ef可利用刀具的几何关系求得:
19、
20、
21、优选地,所述的步骤2包括以下步骤:
22、21)基于坐标变换方程与齿轮齿条啮合原理,可根据切割刀具方程获得齿轮方程rs2:
23、rs2=m21·rs1
24、
25、其中为齿条平移切割时,被切割齿轮转动的角度,可根据齿轮齿条啮合原理求出,ri为齿轮节圆半径,rs2为原点固定在齿轮基体端面中心上,x轴与齿轮齿体中心对称轴重合,y轴固定于齿轮端面上,z轴沿齿宽方向。
26、22)根据lz的取值,可沿齿宽方向均布点数nk,利用样条曲线插值函数在每个齿宽截面上的渐开线外齿廓之间、过渡曲线外轮廓之间、基体外轮廓之间均布节点,对齿轮内部区域中其余节点通过圆弧等分、直线等分的方式进行获取,构成点云rs2′。
27、23)根据齿轮第i个齿不同的旋转角度旋转生成的点云,构成齿轮总节点分布:
28、rs3=m32·r′s2
29、
30、其中z为齿轮的总齿数。
31、优选地,步骤22)具体为:
32、221)当采用圆弧等分点进行填充时,代表最左侧端点,为初始点,代表最右侧端点,为终点,k1和k2之间假设有ntc个等分点,等分角θf为:
33、
34、第j个等分点kfj与k1点之间的距离lj为:
35、
36、则点为:
37、
38、
39、
40、
41、222)当采用直线等分点的方式获取填充点时:
42、
43、其中,xabj与yabj分别代表直线上第j个等分点的x坐标与y坐标,xabl1与yabl1代表最左侧端点的x坐标与y坐标,xabr1与yabr1代表最右侧端点的x坐标与y坐标。
44、优选地,所述的步骤3具体为:
45、将渐开线齿廓部分、过渡曲线上半部分、基体部分的每一个面上的节点均按照先齿廓方向、再齿宽方向进行排序。
46、优选地,所述的步骤4包括以下步骤:
47、41)将渐开线齿廓部分、过渡曲线上半部分单元按照先齿廓方向、再齿宽方向,最后齿厚方向依次创建,以方便有限元软件中接触面的选取。
48、42)将基体部分按照先齿厚方向、再齿宽方向、最后齿廓方向依次创建,以便于齿轮中心节点与内圈节点的耦合。
49、优选地,所述的步骤5包括以下步骤:
50、51)利用matlab生成构成齿轮节点单元的inp文件,运行python脚本对有限元软件进行模型导入、材料赋予、边界条件施加。
51、一种便于有限元设置的齿轮参数化建模与自动化分析方法,该方法具体为:采用所述的参数化建模与有限元设置技术,获取齿轮的啮合特性。
52、与现有技术相比,本发明具有如下优点:
53、(1)本发明建立了一种便于有限元设置的齿轮参数化建模与自动化分析方法,基于所提出的方法,可以快速而准确地完成有限元前期的建模与有限元的设置,无需任何繁琐的前处理而直接进行有限元分析,为研究齿轮的研究人员提供了一种快速便捷的前处理方法;
54、(2)本发明适用于任意参数的齿轮的建模计算,为进一步研究齿轮系统啮合特性和减振降噪奠定基础。
- 还没有人留言评论。精彩留言会获得点赞!