车辆轨迹聚类方法、装置、电子设备及存储介质与流程
本发明涉及大数据分析,尤其涉及一种车辆轨迹聚类方法、装置、电子设备及存储介质。
背景技术:
1、随着全球定位系统(global positioning system,gps)、无线传感器网络(wireless sensornetwork,wsn)等相关定位技术的快速发展,对于车辆的跟踪愈加容易,其运动轨迹可被获取并处理以挖掘所蕴含的相关物理特性等信息。作为时空轨迹挖掘任务的重要环节,车辆轨迹的聚类聚集相似轨迹形成轨迹簇以表征车辆潜在行为特征并据此预测位置以及检测异常,因而,其在实际应用中具有重要意义。
2、车辆轨迹聚类通常用于根据获取到的大量车辆位置特征信息来进行聚类分析,然后得到特定区域的车辆典型运动轨迹的场景。基于密度的聚类算法(density-basedspatial clustering of applications with noise,dbscan)在对车辆轨迹进行聚类时应用较广,但该算法未考虑到距离较远的两条轨迹会通过两条轨迹中间的轨迹密度相连而被归为同一类导致的聚类结果不准确的问题,也未考虑到不同车辆轨迹簇的轨迹密度差距较大导致的聚类结果不准确的问题。与此同时,dbscan需对计算当前轨迹和所有未访问的轨迹之间的距离,时间复杂度为o(n2),对计算资源的消耗较大。
技术实现思路
1、本发明提供一种车辆轨迹聚类方法、装置、电子设备及存储介质,用以解决现有技术中基于密度的聚类算法在对车辆轨迹进行聚类时导致的聚类结果不准确以及对计算资源的消耗较大的缺陷,可以提高聚类结果的准确性并节约计算资源。
2、本发明提供一种车辆轨迹聚类方法,包括:
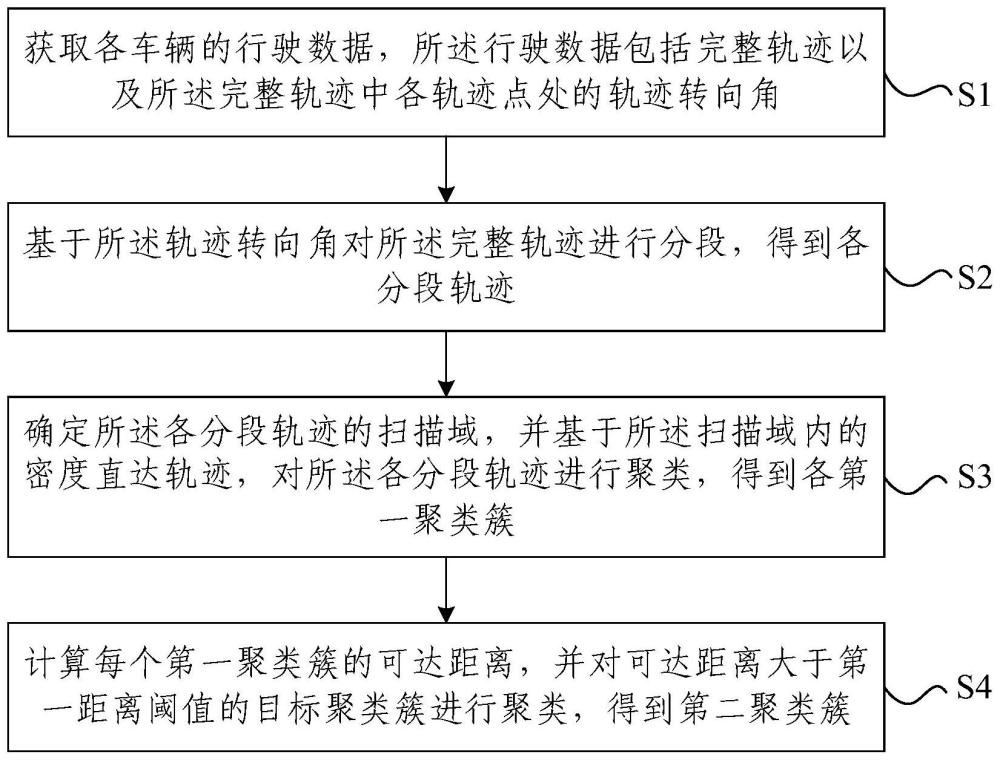
3、获取各车辆的行驶数据,所述行驶数据包括完整轨迹以及所述完整轨迹中各轨迹点处的轨迹转向角;
4、基于所述轨迹转向角对所述完整轨迹进行分段,得到各分段轨迹;
5、确定所述各分段轨迹的扫描域,并基于所述扫描域内的密度直达轨迹,对所述各分段轨迹进行聚类,得到各第一聚类簇;
6、计算每个第一聚类簇的可达距离,并对可达距离大于第一距离阈值的目标聚类簇进行聚类,得到第二聚类簇。
7、根据本发明提供的一种车辆轨迹聚类方法,所述基于所述扫描域内的密度直达轨迹,对所述各分段轨迹进行聚类,得到各第一聚类簇,包括:
8、确定所述各分段轨迹中的核心轨迹以及所述核心轨迹的扫描域内的密度直达轨迹,将所述核心轨迹以及所述核心轨迹的扫描域内的密度直达轨迹按可达距离升序存储至有序队列,并构建结果序列;
9、按顺序依次提取所述有序队列中的轨迹,并对提取的轨迹进行扩展,若提取的轨迹未存在于所述结果序列中,则将提取的轨迹及其可达距离或核心距离保存至所述结果序列;
10、根据所述结果序列中各轨迹的可达距离或核心距离,生成所述各第一聚类簇。
11、根据本发明提供的一种车辆轨迹聚类方法,所述根据所述结果序列中各轨迹的可达距离,生成所述各第一聚类簇,包括:
12、剔除所述结果序列中可达距离或核心距离大于第二距离阈值的异常轨迹,得到正常轨迹;
13、基于所述正常轨迹及其可达距离,确定所述各第一聚类簇。
14、根据本发明提供的一种车辆轨迹聚类方法,所述对可达距离大于第一距离阈值的目标聚类簇进行聚类,得到第二聚类簇,包括:
15、从所述目标聚类簇中随机选取若干目标轨迹,并将所述目标轨迹作为簇中心;
16、对于所述目标聚类簇中除所述目标轨迹外的剩余轨迹,计算所述剩余轨迹与所述簇中心之间的距离,并基于所述剩余轨迹与所述簇中心之间的距离,对所述剩余轨迹进行分簇;
17、重新计算簇中心,并不断进行分簇动作,得到所述第二聚类簇。
18、根据本发明提供的一种车辆轨迹聚类方法,所述计算所述剩余轨迹与所述目标轨迹之间的距离,包括:
19、基于距离归并算法,计算所述剩余轨迹与所述目标轨迹之间的距离。
20、根据本发明提供的一种车辆轨迹聚类方法,所述行驶数据还包括:位置信息、行驶速度信息以及行驶方向信息;所述对可达距离大于第一距离阈值的目标聚类簇进行聚类,得到第二聚类簇,之后包括:
21、基于所述第二聚类簇中各轨迹对应的位置信息、行驶速度信息以及行驶方向信息,计算所述第二聚类簇的典型轨迹,并确定所述典型轨迹的起止点位置以及所述第二聚类簇中的轨迹数量;
22、基于所述起止点位置,并以所述轨迹数量作为所述典型轨迹的权重,构建所述典型轨迹的图结构。
23、根据本发明提供的一种车辆轨迹聚类方法,所述基于所述轨迹转向角对所述完整轨迹进行分段,得到各分段轨迹,包括:
24、基于所述轨迹转向角与转向角阈值之间的大小关系,确定所述各轨迹点中的关键点;
25、基于所述关键点,对所述完整轨迹进行分段,得到所述各分段轨迹。
26、本发明还提供一种车辆轨迹聚类装置,包括:
27、数据获取模块,用于获取各车辆的行驶数据,所述行驶数据包括完整轨迹以及所述完整轨迹中各轨迹点处的轨迹转向角;
28、轨迹分段模块,用于基于所述轨迹转向角对所述完整轨迹进行分段,得到各分段轨迹;
29、第一聚类模块,用于确定所述各分段轨迹的扫描域,并基于所述扫描域内的密度直达轨迹,对所述各分段轨迹进行聚类,得到各第一聚类簇;
30、第二聚类模块,用于计算每个第一聚类簇的可达距离,并对可达距离大于第一距离阈值的目标聚类簇进行聚类,得到第二聚类簇。
31、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一种所述的车辆轨迹聚类方法。
32、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述的车辆轨迹聚类方法。
33、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述的车辆轨迹聚类方法。
34、本发明提供的车辆轨迹聚类方法、装置、电子设备及存储介质,该方法首先获取各车辆的行驶数据,行驶数据包括完整轨迹以及完整轨迹中各轨迹点处的轨迹转向角;然后基于轨迹转向角对完整轨迹进行分段,得到各分段轨迹;此后确定各分段轨迹的扫描域,并基于扫描域内的密度直达轨迹,对各分段轨迹进行聚类,得到各第一聚类簇;最后计算每个第一聚类簇的可达距离,并对可达距离大于第一距离阈值的目标聚类簇进行聚类,得到第二聚类簇。该方法引入各分段轨迹的扫描域,可以缩小扫描范围,大幅度优化运行速度,节约计算资源,可以解决现有技术无法识别密度差距较大的不同轨迹簇,无法识别同一轨迹簇中差异较大的轨迹的问题,并显著提升运行速度。而且,该方法利用扫描域内的密度直达轨迹,对各分段轨迹进行聚类,可以对任意密度的分段轨迹进行分类,可针对不同轨迹簇的轨迹密度差异较大的场景。该方法先计算每个第一聚类簇的可达距离,然后对可达距离大于第一距离阈值的目标聚类簇进行聚类,得到第二聚类簇,可以识别同一轨迹簇中差异较大的轨迹,提高第二聚类簇的准确性。
- 还没有人留言评论。精彩留言会获得点赞!