一种基于遗传算法的KB显微成像系统角度优化设计方法与流程
本发明涉及显微成像,具体涉及一种基于遗传算法的kb显微成像系统角度优化设计方法。
背景技术:
1、kirkpatrick-baez(kb)显微成像系统的空间分辨能力能够达到3~5μm,在激光惯性约束聚变高空间分辨x射线成像实验中具有重要的应用;单个通道的kb显微成像系统由2块曲面反射镜组成,其成像性能极大的依赖于kb反射镜掠入射角度以及镜子的旋转角度的设计,即构成kb显微成像系统的第一块曲面反射镜m1的掠入射角和镜子的旋转角;第二块镜子m2的掠入射角和旋转角。
2、目前,对于kb显微成像系统掠入射角和旋转角的优化设计没有统一的标准,一般依据物理实验需求的x射线能区范围、镀膜反射率以及像点的空间位置等进行大致计算获得或者是采用商业光学设计软件;kb显微镜的2块镜子的掠入射角和旋转角并不一定是kb显微成像系统的最优角度值;且kb显微成像系统对角度的精度很敏感,如果角度偏离设计值,则会造成kb显微成像系统成像性能的极大降低。
技术实现思路
1、为解决kb显微成像系统的掠入射角和旋转角优化问题,本发明提供了一种基于遗传算法的kb显微成像系统角度优化设计方法。
2、其技术方案如下:
3、一种基于遗传算法的kb显微成像系统角度优化设计方法,其要点在于,包括以下步骤:
4、s1、设置kb显微成像系统,及系统的固定参数;
5、所述kb显微成像系统由曲面反射镜m1和曲面反射镜m2组成,且曲面反射镜m1和曲面反射镜m2的光轴接近正交配置,即便曲面反射镜m1的光轴与垂直于水平面的竖轴存在一个夹角,标记该夹角为旋转角α1,曲面反射镜m2的光轴与水平面也存在一个夹角,标记该夹角为旋转角α2;
6、以光线出发点为物点a0,光线以掠入射角θ1射到kb成像系统的反射面镀膜区域的中心点,标记该点为曲面反射镜m1的顶点b,并标记曲面反射镜m1的球心为c1;同理,光线以掠入射角θ2射到曲面反射镜m2的曲面镀膜中心的点,标记该点为曲面反射镜m2的顶点b2,曲面反射镜m2的球心标记为c2;
7、所述固定参数包括物距u、像距v、曲面反射镜的宽度d、曲率半径r以及镀膜宽度w;
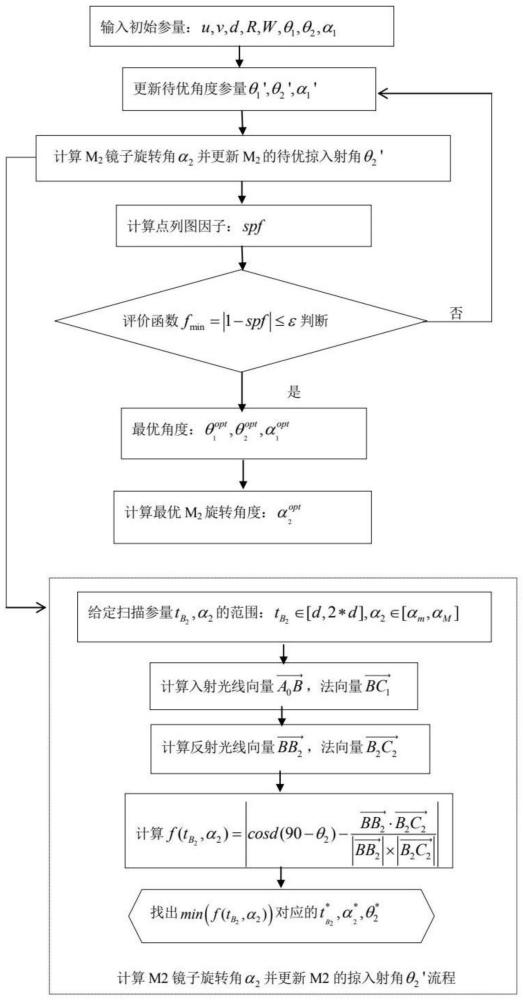
8、s2、对kb显微成像系统的角度参量θ1,θ2,α1赋值,获得待优化参量θ1',θ2',α1;
9、s3、计算曲面反射镜m2的旋转角α2,并更新对应的掠入射角值到待优掠入射角θ2';
10、s4、计算点列图因子spf,并设置最小阈值ε;
11、s5、计算评价函数fmin=|1-spf|,并判断评价函数fmin与最小阈值ε的大小;
12、如果fmin>ε,则返回步骤s2,随机更新待优化参量θ1',θ2',α1';
13、如果fmin≤ε,则输出当前待优化参量作为最优角度参量
14、s6、根据最优角度参量计算最优旋转角度
15、用户只需要设置三个角度参量θ1,θ2,α1,以及评价函数fmin的最小阈值ε,当评价函数fmin小于最小阈值ε时,系统通过遗传算法对角度参量进行迭代,最小阈值ε越小迭代次数越多,系统输出的最优旋转角度的精度越高。
16、作为优选:步骤s2中,通过均匀随机采样算法初始化kb显微成像系统的角度参量θ1,θ2,α1,所述待优化参量用于后续遗传算法迭代优化。
17、作为优选:步骤s3中,所述曲面反射镜m2的旋转角α2受曲面反射镜m2的球面方程公式1和掠入射角方程公式2约束,计算曲面反射镜m2的旋转角α2需通过扫描参量的方法求解由公式1和公式2导出的误差方程的最小值获得,同时获得对应的曲面反射镜m2的掠入射角度值用于更新待优掠入射角θ2';
18、
19、
20、其中,为入射光线在曲面反射镜m1上的反射光线向量;为从曲面反射镜m2的顶点b2指向曲面反射镜m2球心c2的单位向量;为曲面反射镜m2的球心c2的坐标;为曲面反射镜m2的顶点b2的坐标。
21、曲面反光镜m2的掠入射角θ2满足反射定律,即从曲面反光镜m1反射的光线入射到曲面反光镜m2后经曲面反光镜m2再次反射,入射角等于反射角,曲面反光镜m2的法线是其角平分线,在曲面反光镜m2上掠入射角θ2与入射角互余,m2的掠入射角度θ2满足约束公式2。
22、作为优选:计算曲面反射镜m2的旋转角α2包括以下步骤:
23、s31、联合公式1、公式2以及公式3;
24、所述公式3为曲面反光镜m1的反射光线向量直线方程:
25、
26、其中,xb,yb,zb代表曲面反射镜m1的顶点b坐标;l1,m1,n1代表曲面反射镜m1的反射光线的单位向量的三个分量;代表直线参量;
27、s32、扫描直线参量和曲面反射镜m2的旋转角α2的范围;
28、s33、计算曲面反射镜m1的入射向量和法向量
29、设入射向量的单位向量为lmn=[l,m,n],设法向量的单位向量为lmn'=[l-,m-,n-];
30、
31、
32、其中,xa0,ya0,za0表示物点a0的坐标;表示曲面反射镜m1的球心c1的坐标;
33、s34、计算曲面反射镜m2的反射向量和法向量
34、代入入射向量和法向量到公式6,获得反射向量的单位向量:
35、
36、反射向量的分量l1,m1,n1可表示为:
37、
38、设曲面反射镜m2球心c2坐标为则法向量表示为:
39、
40、根据m1的反射光线向量直线方程公式3,用顶点b的坐标来表示顶点b2的坐标;
41、将公式3代入公式1,获得获得曲面反射镜m2的球心c2的x坐标为:
42、
43、利用公式10计算曲面反射镜m2的球心c2的坐标
44、
45、s35、将反射向量和法向量代入公式2,该公式2中存在变量在步骤s32扫描的范围内,求解误差方程的最小值,获得满足满足公式2的最佳的变量标记其为最佳变量误差方程计算公式如下:
46、
47、s36、获取当前最佳变量对应的掠入射角度值并将其更新到掠入射角θ2',即
48、约束公式2包含了m1球面的顶点坐标b,m1球面的球心c1,m2球面的顶点b2,m2球面的球心c2点,该公式包含四个参量:其中α1,θ1,θ2在参量初始化已经赋值,属于已知量,剩下的2个未知变量为通过在参量范围内扫描这2个参量寻找到满足m2掠入射角方程的参量实现kb显微成像系统角度优化。
49、作为优选:步骤s4中,计算更新旋转角α2和掠入射角θ2后的kb显微成像系统的点列图因子spf,用于判断kb显微镜成像效果,计算公式如下:
50、spf=ncir/nkb (12)
51、其中,nkb代表kb显微镜对点源成像模拟的总像点数目,ncir代表落在给定半径rcir区域内的像点数目,rcir是kb成像面定义的弥散斑大小。
52、点列图因子spf表示了kb显微成像系统的点扩展函数的弥散程度,是判断kb显微成像系统的成像性能的重要指标,spf越大则表明能量越集中,kb显微镜成像效果越好;spf越小则表明能量越分散,kb显微镜成像效果越差。
53、作为优选:步骤s2到步骤s5为遗传算法的迭代过程,评价函数fmin=|1-spf|是应用遗传算法进行参量优化设计的目标函数,当目标函数达到最小值时,点列图因子spf达到最大值,系统当前的待优化参量的值为全局最优。
54、与现有技术相比,本发明的有益效果:
55、采用以上技术方案的一种基于遗传算法的kb显微成像系统角度优化设计方法,针对kb掠入射反射成像系统的角度优化提出一种的高效、灵活和通用的优化框架,并在此基础上实现kb显微成像系统的结构优化。本发明利用遗传优化算法,对评估函数大于设定最小阈值ε的角度自动进行迭代,获得足够精确地最优角度,包括曲面反光镜m1的掠入射角θ1和旋转角α1,曲面反光镜m2的掠入射角θ2和旋转角α2,使得kb显微成像系统能够达到最佳的空间分辨。本发明的kb显微成像系统的指标点列图因子spf明显高于其他kb显微成像系统。
- 还没有人留言评论。精彩留言会获得点赞!