基于AI算法的汽车雨刮检测方法、装置及存储介质与流程
本发明涉及雨刮检测,尤其是涉及基于ai算法的汽车雨刮检测方法、装置及存储介质。
背景技术:
1、传统的雨刮喷水系统检测方法主要依赖于人工目检,该方法涉及雇佣专业操作员来观察车辆整装线上的雨刮喷水系统。操作员的任务是确认系统是否成功进行雨刮和喷水操作。这一过程通常包括以下步骤:
2、目视检查雨刮器运作:操作员观察雨刮器的运动,确保它们按照预定的方式移动,以有效地清除挡风玻璃上的雨水或杂质。
3、检查喷水功能:操作员检查喷水喷头是否成功喷水到挡风玻璃上,以确保雨刮器在清洁时有足够的润湿。
4、记录和标记问题:如果操作员发现雨刮喷水系统有任何问题,他们会记录并标记问题的车辆,以便进一步的维修和修复。
5、传统的人工目检方法一般适用于单孔雨刮,操作员坐在主驾驶上在操作雨刮时,能准确判断雨刮的喷水状态,如果雨刮碰水口有多个,喷水射程较短,比如高配版型格,操作员在驾驶位无法判断雨刮孔的所有喷水状态,需额外安排人去检测雨刮的喷水状态,导致结果受到操作员主观判断的影响,可能会出现不一致性,依赖人工操作,速度较慢,不适合高产量生产线,雇佣专业操作员和培训成本较高。
技术实现思路
1、本发明的目的在于提供基于ai算法的汽车雨刮检测方法、装置及存储介质,以解决现有的人工目检方法结果受到操作员主观判断的影响,可能会出现不一致性,依赖人工操作,速度较慢,不适合高产量生产线,雇佣专业操作员和培训成本较高的问题。
2、为实现上述目的,本发明提供了以下技术方案:
3、根据本发明实施例的第一方面,提供基于ai算法的汽车雨刮检测方法,所述方法包括:
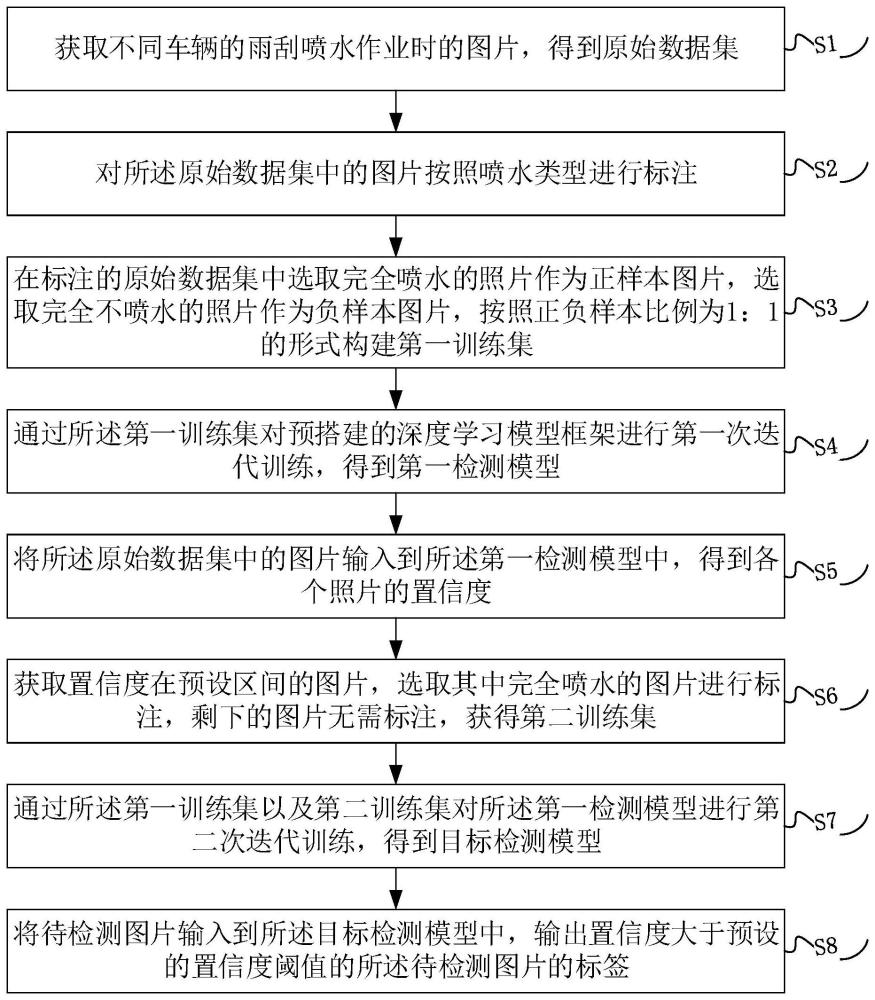
4、获取不同车辆的雨刮喷水作业时的图片,得到原始数据集;
5、对所述原始数据集中的图片按照喷水类型进行标注;
6、在标注的原始数据集中选取完全喷水的照片作为正样本图片,选取完全不喷水的照片作为负样本图片,按照正负样本比例为1:1的形式构建第一训练集;
7、通过所述第一训练集对预搭建的深度学习模型框架进行第一次迭代训练,得到第一检测模型;
8、将所述原始数据集中的图片输入到所述第一检测模型中,得到各个照片的置信度;
9、获取置信度在预设区间的图片,选取其中完全喷水的图片进行标注,剩下的图片无需标注,获得第二训练集;
10、通过所述第一训练集以及第二训练集对所述第一检测模型进行第二次迭代训练,得到目标检测模型;
11、将待检测图片输入到所述目标检测模型中,输出置信度大于预设的置信度阈值的所述待检测图片的标签。
12、优选地,
13、所述获取不同车辆的雨刮喷水作业时的图片包括:
14、待检测车辆进入工位以后,通过扫码相机扫描所述待检测车辆的vin码,根据所述待检测车辆的vin码在gmes系统中进行查询;
15、获取到所述待检测车辆的各个维度的信息,根据车辆的各个维度信息将工业相机移动到预设的位置,操作所述待检测车辆的雨刮进行喷水作业,通过所述工业相机获取雨刮喷水的图片。
16、优选地,
17、所述通过所述工业相机获取雨刮喷水的图片包括:
18、所述待检测车辆的雨刮采用点喷形式,点喷间隔时间小于500ms;
19、所述工业相机连续抓拍的间隔为150ms。
20、优选地,还包括:对获取的所述原始数据集进行样本增强;
21、所述样本增强包括:
22、对所述原始数据集中的任意图片进行亮度调整,获得亮度调整后的图片;
23、对所述原始数据集中的任意图片在x轴以及y轴上进行角度偏移,获得角度调整后的图片;
24、将所述亮度调整后的图片以及角度调整后的图片合并到所述原始数据集中。
25、优选地,
26、所述对所述原始数据集中的图片按照喷水类型进行标注包括:
27、将所述原始数据集中的图片按照喷水类型划分为水柱型喷水图片以及扇形喷水图片;
28、对于所述水柱型喷水图片,采用实例分割方式进行标注;
29、对于所述扇形喷水图片,采用目标检测方式进行标注。
30、优选地,
31、所述对于所述水柱型喷水图片,采用实例分割方式进行标注包括:
32、所述水柱型喷水图片中每个喷头喷出对应角度的水柱,对于每个喷头及其对应的水柱通过检测框进行包围,并设置对应的标签;
33、所述对于所述扇形喷水图片,采用目标检测方式进行标注包括:
34、对所述扇形喷水图片中的喷头的喷口位置处通过检测框进行包围,并设置对应的标签。
35、优选地,
36、所述预设的置信度阈值为0.95。
37、根据本发明实施例的第二方面,提供基于ai算法的汽车雨刮检测装置,所述装置包括:
38、数据获取模块:用于获取不同车辆的雨刮喷水作业时的图片,得到原始数据集;
39、标注模块:用于对所述原始数据集中的图片按照喷水类型进行标注;
40、第一训练集构建模块:用于在标注的原始数据集中选取完全喷水的照片作为正样本图片,选取完全不喷水的照片作为负样本图片,按照正负样本比例为1:1的形式构建第一训练集;
41、第一训练模块:用于通过所述第一训练集对预搭建的深度学习模型框架进行第一次迭代训练,得到第一检测模型;
42、置信度获取模块:用于将所述原始数据集中的图片输入到所述第一检测模型中,得到各个照片的置信度;
43、第二训练集获取模块:用于获取置信度在预设区间的图片,选取其中完全喷水的图片进行标注,剩下的图片无需标注,获得第二训练集;
44、第二训练模块:用于通过所述第一训练集以及第二训练集对所述第一检测模型进行第二次迭代训练,得到目标检测模型;
45、检测模块:用于将待检测图片输入到所述目标检测模型中,输出置信度大于预设的置信度阈值的所述待检测图片的标签。
46、根据本发明实施例的第三方面,提供一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被主控器执行时,实现上述的方法中的各个步骤。
47、本发明的实施例提供的技术方案可以包括以下有益效果:
48、本技术采用深度学习目标检测算法和实例分割检测算法,设计了一种可以针对多种雨刮喷水状态的ai自动化检测方法,消除了传统的人工目检,从而实现自动化的多类型雨刮喷水系统质检,这提高了效率,减少了人工干预,缩短了生产周期,传统目检容易受到操作员主观判断的影响,而本发明的技术是基于算法的,因此更加客观和一致,不受主观因素干扰,可以提供可靠的质检结果,基于深度学习的技术能够在实时性和高精度方面表现出色,它能够快速检测雨刮喷水系统的状态,并实时反馈,从而有助于快速采取必要的纠正措施,本发明可以通过模型微调和在线学习来适应不同的生产环境和雨刮喷水系统设计变化,这使得本技术具有更高的适应性和升级性,以满足不断变化的需求。
49、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
- 还没有人留言评论。精彩留言会获得点赞!